TRT发电机组伺服作动器改进
2013-12-04纪田宇朱先亮
设备管理与维修 2013年12期
纪田宇 朱先亮 刘 喆 黄 伟 宋 闯
山东钢铁集团莱芜分公司设备检修中心 山东莱芜市
1.问题
TRT发电机组伺服作动器结构见图1,其中敏感元件和转换元件组成作动器位置传感器(以下简称传感器)。转换元件将敏感元件的位置变化转换为4~20mA电流信号输送给伺服控制器,与指令信号进行比较,误差信号被放大后,送入电液伺服阀,伺服阀按一定比例将电信号转变成液压油流量,推动伺服作动器活塞动作,进行下一次调节。目前TRT机组运行过程中存在以下问题。

图1 伺服作动器结构
(1)通常TRT机组入口高炉煤气温度约160℃,作动器于透平机直接相连具有良好的热传递效果,而传感器正常工作温度范围是-10~70℃,导致传感器零点漂移及反馈信号不准确。
(2)作动器为满足调控高炉顶压要求,长期作往复运动,油缸密封部位在长期高温、摩擦作用下极易老化,导致动力油渗入传感器工作区,造成积灰和腐蚀。
(3)传感器安装在作动器内部,可调试性能差且更换困难。目前更换传感器,必须在机组停机状况下进行,同时需要进行大型阀门的操作及氮气吹扫等一系列长时间和高强度的工作,严重影响生产。
2.改进措施
经研究试验,决定外置传感器(图2)。从筒体抽出传感器,将支架固定在伺服作动器壳体上方,调节螺栓可根据现场实际位置自由调节。敏感元件通过连接装置与活塞相连,活塞带动敏感元件同步动作,工作原理不变。
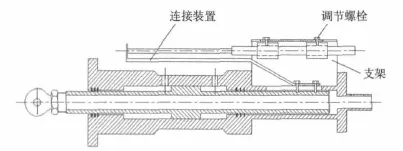
图2 改造后伺服作动器结构
改进后,更换、调试传感器方便,可直观观察敏感元件位置变化,处于大气环境便于散热,传感器故障率明显降低,设备运行稳定。 W13.12-37