POS系统及其在航空摄影中的应用
2013-12-03杨成,白石
杨 成,白 石
(西安中飞航空遥感技术有限公司,西安 710089)
1 研究背景
航空摄影测量从模拟摄影测量到解析摄影测量再到现在的数字摄影测量来获取数据,已经走过了一个半世纪的时间,传统的航空摄影获取数据需要大量的地面控制点,通过空三解求航片的内外方位元素,然后完成数据获取。随着新技术的出现和发展,这种传统的测图方式,正逐渐吸收新技术,获得了全面的发展和提高,随着它们结合优越性的体现,已经逐渐成熟和完善起来。
摄影测量中的基本问题是航片的定向问题,只有知道了航片的内、外方位元素才能进行量测工作。长期以来内方位元素通过实验室采用物理方法检定得到,外方位元素(Xs,Ys,Zs,φ,ω,κ)则主要依靠空中三角测量和大量地面控制点来间接解求,这样就要耗费大量的时间和工作量,应其所求,POS系统被逐渐应用到这个领域,并且逐渐解决了体积、精度的问题。结合了光学相机获取影象、POS系统提供航片曝光时刻的外方位元素,这种结合方式正逐渐改变了传统摄影测量的作业方式,取得了很大的成功。
本文中我们分析讨论一下传统的航空相机(RC-30)加POS系统获取数据的运行原理和误差的产生,及我们航摄飞行操作中避免误差的有效措施。在这套系统获取数据过程中,以RC-30相机获取地物影像,而POS系统获取点位数据和角度数据。
2 POS系统系统描述及运行原理
2.1 POS系统描述
POS(Position and Orientation System)测姿定位系统,为航空摄影提供地理参考的位置及方位系统,测量每个航片的6个外方位元素即绝对位置(X,Y,Z)和姿态参数(φ,ω,κ)。这个系统集合了高精度的惯性感应器,GPS测量处理技术和数据处理软件。
POS系统由4部分组成:惯性测量单元(IMU)、双频GPS接受机、数据处理计算机系统(PCS)和处理软件(POSPAC)。系统核心是积分惯性导航软件,在飞行过程中实时处理搜集的GPS和惯性测量数据,给出惯性导航解及GPS位置坐标。然后飞行完成后通过POSPAC获取每张航片的外方位元素。
2.1.1 惯性测量单元(IMU)
IMU拥有3组加速度计和陀螺仪,数字电路和一个CPU(见图1),加速度和陀螺仪的补偿值作为线加速度和角速度提供给 PCS,PCS积分计算出加速度和角速度,最后得出IMU的位置、速度、姿态。
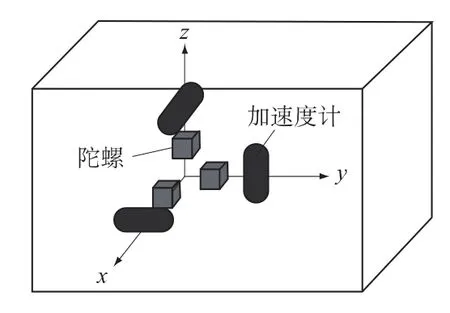
图1 惯性测量单元示意图Fig.1 Schematic of inertia measurement unit(IMU)
2.1.2 GPS 接收机
POS在飞行过程中提供高精度的实时定位数据,它的原始观测值由GPS接收机来提供,本文使用高动态GPS信号接受机,接受C/A码来进行解算。
GPS信号接收机接受信号用来测量,一般有2种观测量:伪距观测量和载波相位观测量。GPS接收机接到卫星发射的时钟信号,比较信号,测出本机信号延迟量,得出卫星到接收机相位中心的距离,由于传播介质和时钟的延迟,此距离并非卫星和接收机的准确距离,这种观测量为伪距观测量,通过伪距观测量差分处理获得POS空中动态定位数据,这种动态定位差分数据可获得7 m的精度。另一种为载波相位观测量,这种观测量用于飞行事后处理,在POSPAC软件中使用。
由于测量中要得到更好精度的定位数据用来实际测量,载波相位差分处理就被发现和使用起来。载波相位观测量是通过对载波信号的恢复以及对载波相位的跟踪观察和测量而得到的。它实际上是由GPS卫星信号和GPS接收机信号的相位比较而获得的相位差值。当GPS接收机捕获卫星信号之后,只要跟踪不中断,接收机便会自动给出跟踪期间载波相位整周数的变化量和所测相位不足一周的小数部分。也就是说,在载波相位测量中,观测得到的相位差是连续记数的,从第一个历元开始,在后继的观察中,其观测量不仅包括相位差的小数部分,而且包括累计的整周数,第一个历元的整周相位数未知,当我们采取措施获得这个整周相位数,就可以通过处理这些关于位置函数的相位信息,校正信号延迟和电离层延迟,获取定位和卫星定轨的数据。研究表明,利用载波相位可以获得厘米级精度差分动态定位结果。
2.2 运行原理
PCS是POS系统集成的数据处理系统,它用来在空中实时处理IMU传感器和GPS搜集的数据,记录数据以用于后处理的软件系统。IMU和GPS的初始数据经PCS处理,可以得到带有POS系统(天线相位中心)刚体的绝对位置,传感器姿态(IMU的俯仰(roll)、翻滚(pitch)、旋转(heading))。
在飞行器运行过程中,定位问题一直很难解决,这个随着GPS的应用得到了很好完成,但是姿态的测量就又成了新的难题。POS的出现结合GPS和IMU2个硬件,内置PCS软件运用获取的GPS数据和IMU数据相互校正,使这个问题得以很好解决,并且得到很好的精度效果。
PCS软件包括捷联式惯性导航器(SIN),Kalman滤波器(KF)、闭环错误控制器(CLEC)、平滑器(SM)、前向错误控制器(FEC)、飞行中实时定向(IFA)。
PCS收集GPS位置和速度来初始化SIN,并根据垂直方向和地理北极进行定向;以垂直参考为水准定向,以北向参考为偏航角定向,SIN积分出角速度从而计算出IMU的方向变化。然后利用已知方向解出IMU在该坐标系的线速度,最后积分得到IMU的位置变化。这也意味着任何方向值的误差均造成位置错误。SIN得到的值相对而言是很精确的了,但是用的是积分过程,加速度和陀螺仪的误差累计到逐渐增长的位置、速度和方向误差。
Kalman滤波器用来利用GPS估计SIN中的误差。Kalman滤波主要解求一组模拟IMU仪器误差和其影响的SIN误差的线性离散方程。用GPS的位置与SIN中的位置差别来估计SIN中逐渐增长的误差。
闭环错误控制算法利用Kalman参数重新设置SIN。同样,惯性错误差值用于IMU对角加速度和线加速度的积分,以及对传感器的几何校正。最后的积分惯性导航提高了GPS位置和速度的精度,对惯性误差的校正提高了方向精度。
POS系统最重要的作用是来空中实时定向,这样通过后续处理,内差每个航片的时间点,利用POS系统的实时定向,精确地求出航片的绝对位置和姿态参数。POS系统空中定向分3步走:粗水平定向、粗偏航角定向、精偏航角定向。
粗水平定向对加速度值进行一次低通滤波得到每个加速度的平均重力信号来估计IMU的翻滚和俯仰角,误差1°~2°之间。粗偏航向角定向用KF误差模型来描述航偏角的不确定性。导航坐标系中的偏航角误差会造成积分过程中从陀螺仪误差减去的地球自传值的误差。该误差又会累积到速度和位置误差。如果陀螺仪误差够小,地球自转误差造成的位置和方向可利用GPS发现,因为偏航角误差最多只能降低到几度之内。幸运的是偏航角误差造成的IMU加速度变化会产生极大的位置和速度误差,该误差能被GPS值观测出来。这就使KF估计偏航角误差精度达到1°以内。粗偏航角定向中KF估计偏航角误差10°内。空中飞行中偏航角精度要求较高(heading<0.3°)航偏角误差主要通过加速度观测。在垂直或水平无加速度(直线飞行)飞行中,航偏角误差增加比率由陀螺仪噪声和残差来决定,一旦有加速度,航偏角会被发现和重置,平滑器会差值运算,这样将减小整个航线的航偏角误差。飞行策略是一条航线飞行要控制在30 min之内,然后转弯进入航线,航偏角重置,精度提高。
3 POS系统在航空摄影中应用的注意事项
POS应用来获得航摄过程中每张航片的尽量精确姿态参数和航片像主点精确坐标,以求来省略传统航空摄影复杂的地面点控制测量等烦杂的工程,以最佳效果直接定向,进行适宜比例尺的地图量测。除了POS系统固有的误差,需要在飞行时采取有效措施,以求获取更好的精度效果。POS系统连接图见图2。
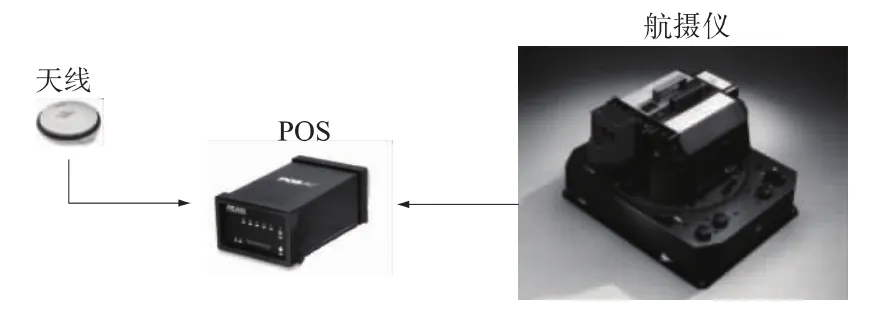
图2 POS系统连接图Fig.2 Connection of POS system
3.1 偏心分量量测
航摄中、天线、POS系统,相机(和IMU刚性连接)如上图,在工作过程中,POS系统反映天线相位中心的位置及IMU姿态参数,我们要获得相机焦平面所拍摄的航片的像主点位置和姿态,这样就要量测天线相位中心到相机焦平面中心的偏心分量,和IUM中心到焦平面的中心的偏心分量,在航摄前,安装好相机和天线,固定好IMU和相机的刚体后,使用平板玻璃测量法可以获得厘米级精度,和差分GPS定位精度匹配。当固定好IUM和相机的刚体后,IUM的记录姿态正好反映相机的姿态,通过第一个架次的检校场飞行,就可确定航片和IMU各轴夹角,从而确定航片的姿态参数,从这之后不要破坏IMU和相机的刚体连接,它们之间有有变动时,重飞检校场,获取新的夹角参数。IMU的姿态参数是后期的数据处理的基础,为了确保精度,在实际的生产中需要在项目前后各进行一次检校飞行。
3.2 初始化POS及GPS
GPS差分运算获取位置信息进行相位差分需要得到第一个历元整周相位数(模糊度)这个相位数通过飞行前后地面至少4 min的静态观测获得,如果静态观测的时间长,可以有利于解算和相位差分精度的提高,同时POS收集加速度信息,进行粗水平导航。由于是使用载波相位差分处理获取高精度定位,在整个架次飞行中要求GPS尽量信号不要失锁,避免信号失锁的办法是:天线安装在飞机上尽量遮挡少,飞行时飞机姿态变化尽量小,同时要牢固,不破坏飞机气动性能。
如果由于特殊原因在起飞前没能有足够静态观测时间,在空中正常飞行时要尽量避免信号失锁,落地时要在一直保持飞机供电情况下,做够时间静态观测时间。
3.3 飞行中POS姿态观察及情况处理
飞行过程中注意观察POS显示姿态数据(可以通过电脑运行POSAV软件来观察),其中由于进入航线平稳飞行,IMU加速度变化很小,这样IMU的噪声等会使POS精偏航角定向精度变低(heading值增大),当精偏航角定向精度增大到一定程度(已经不能满足测图要求,比如超过0.3°)就要断开航线,转弯以增加IMU中加速度计的方向加速度,这时航偏角会被重置,就会增加精度。
在POS的 IMU2.0版本的最佳定位精度是0.03°,如果在 POSAV 设置提示里输入0.05的话,POSAV 很快就会变红报警,从0.03°到0.091变化大概就4 min左右,这时航线刚刚进入或者还没有飞完成,转弯增加定向精度,都这样操作就会造成极大浪费,航摄效率非常低。
为减少浪费,提高航摄效率,可采取下面的有效措施以提高POS系统精度,减少非必要断开航线转弯:
(1)在现实情况下,由于在后期数据处理中,航摄比例尺对外方位角度(ξα,ξω,ξκ)的精度要求都在0.517°上,我们可以适当选取报警的域值,取0.6°(最大误差)的一半,即0.3°来表示填入 POSAV,作为报警域值,当接近或到这个数值时,报警灯变红,我们再采取措施,从 heading 的0.03°到0.3°变化时间大概是30 min,这样可以极大放大飞行航线时间。
(2)在每架次飞行首条航线前,应进行“8”飞行,改善POS精度。
(3)如果是平行航线,可采取对向飞行,使得邻接的2条航线改变飞行方向,可有效提高定位精度。
(4)如果航线不是特别长,同时为增加飞行效率,可在进入航线的预备航线时,适当在航线左右变化飞行方向,飞“S”型曲线,进入改平点后,再正常平飞,这样对精度的维持与改善会有很好的效果。
3.4 基站布设
POS解算数据差分定位需要地面基站同步记录数据以在数据处理时进行差分定位,基站的距离位置对差分定位的精度有很大的影响,所以一般基站架设在测区内,距离实际飞行测线不超过200 km距离。如果测区跨度很大,飞行设计方案可以考虑多基站设置。
4 结语
POS系统结合航空相机获取地面数据已经历经多次实践、应用与检验。经过处理和校验,数据完全能满足直接定向要求,可大大节省整个航空摄影加密测图流畅的工作时间。在航摄过程中,如果在操作中产生和加大了误差,就要通过地面控制点空三加密来提高精度,这样反而会给整个测量过程就增加额外的工作量,延长作业周期,降低作业效率。因此在航摄生产中,采取适当措施来提高POS系统的精确性,就可缩短航空摄影的作业时间,减少作业开支,提高作业效率,让新技术更好地为测绘生产服务。
[1]王之卓.摄影测量学原理[M].北京:测绘出版社,1979.(WANG Zhi-zhuo.The Principle of Photogrammetry[M].Beijing:Surveying and Mapping Press,1979.(in Chinese))
[2]袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001.(YUAN Xiu-xiao.The Principle and Application of GPS-Assisted Aerial Triangulation[M].Beijing:Surveying and Mapping Press,2001.(in Chinese))
[3]袁修孝,付建红,左正立,等.机载POS系统用于航空遥感直接对地目标定位的精度分析[J].武汉大学学报(信息科学版),2006,(10):1 -3.(YUAN Xiu-xiao,FU Jian-hong,ZUO Zheng-li,et al.The Analysis of POS Systems for Airborne Remote Sensing Direction to the Ground Target Position Accuracy[J].Geomatics and Information Science of Wuhan University,2006,(10):1 -3.(in Chinese))
[4]刘 军,张永生,王冬红.POS AV510-DG系统外方位元素的计算方法[J].测绘技术装备,2006,(4):6-9.(LIU Jun,ZHANG Yong-sheng,WANG Dong-hong.The Method of Calculating the Exterior Orientation Elements of POS AV510-DG[J].Geomatics Technology and Equipment,2006,(4):6 -9.(in Chinese))
[5]山海涛,马淑宇,陈筱勇,等.考虑内定向误差的外方位元素精度分析[J].测绘科学,2007,(1):14 -15.(SHAN Hai-tao,MA Shu-yu,CHEN Shu-yong,et al.Analysis of Exterior Orientation Accuracy under the Interior Orientation Error[J].Science of Surveying and Mapping,2007,(1):14 -15.(in Chinese))