基于DSP+FPGA的DBF雷达收发校正技术实现
2013-12-03胡丙华胡进军孔凡泉中国电子科技集团电子第三十八研究所安徽合肥230031
胡丙华,胡进军,孔凡泉 (中国电子科技集团电子第三十八研究所,安徽 合肥230031)
数字波束形成 (Data Beam Formation,DBF)是天线技术与数字技术共同发展的结果。数字波束形成可以这样理解:阵列天线单元的方向图是全方位的,阵列的输出复信号经过某种加权求和后,将同一个入射目标由于分布在空间中各个传感器的位置差异而导致的传播波程差引入的相位差补偿掉而实现各路信号之间同相叠加,即阵列接收的方向增益聚集在某一个方向上,实现在该方向上能量的最大化。而收发校正是DBF雷达的关键技术之一。笔者分析的收发校正是基于多个行线阵天线、多个接收通道的雷达系统,校正的关键是保证各个通道间的幅相一致性和通道本身的平稳性,否则将会破坏天线方向图特性,使形成的波束指向偏离、副瓣电平变坏、宽度变差等[1]。
1 数字天线阵列及DBF原理
数字天线阵列系统有别于传统的相控阵系统,它的幅度、相位、频率调整全部用数字器件完成。在数字天线阵列系统中方向图是动态的,可以根据需要人为控制或自适应调整阵列的波束指向,整个系统的灵活性极强。数字阵列雷达在对抗电子干扰、反隐身、目标精密跟踪及高分辨方面具有广阔的军事应用前景。现简单介绍行线阵天线及DBF的基本原理[2]。
如图1所示,相邻天线单元信号在空间传输的相位差为:

移相器提供的阵内相位差为:

式中,θ、θ0分别为目标方向角与波束最大值指向角。
假设雷达天线有N个行线阵,对应N路行波馈源和N路接收机,仰角上同时形成L个指向的波束,覆盖H°空域,则DBF要完成下列运算:


图1 行线阵天线示意图
式中,Xn为一组来自N个接收机的复信号;Wn(L)为L组用于加权L个波束的系数,每一组都有N个;Sn(L)为L组用于形成L个波束指向的系数,每一组都有N个;Cn为一组N个通道的接收校正系数。Xn经过实时A/D采样得到,Wn(L)、Sn(L)则根据不同需要预先计算得到,Cn只能通过内、外场接收校正得到。Cn在DBF中是很重要的因素之一,其精度直接影响到所形成的各个波束的指向精度、副瓣电平、主瓣宽度[3]。
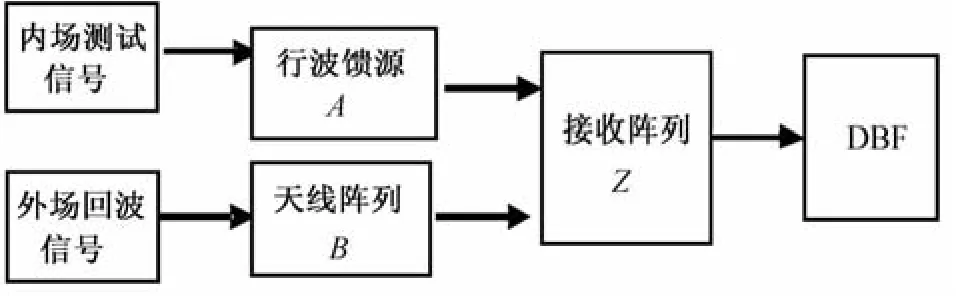
图2 接收校正简化框图
2 收发校正的工程实现
为了便于分析,简化接收校正框图,如图2所示。
对真实回波,需要校正B和Z通道的幅度相位差,求逆得到Cn=(BZ)-1,Cn作为一组N个阵列的接收校正系数参加DBF(L)运算网络的运算,在此感兴趣的就是接收校正系数(BZ)-1。
内场校正网络使用行波馈源校正网络,测试信号由接收系统的频率源产生,经车外电缆和射频旋转关节后,由行波馈源校正网络A馈入,分别耦合到各路接收机Z,接收机将测试信号放大并下变频至中频,经中频汇流环和车外电缆进入I/Q形成分机,再通过高速数字接口进入DBF运算网络,得到内场校正数据:

外场校正时需要选择一开阔且干扰尽可能小的场地,信号源产生同频的测试校准信号,天线阵列B接收,送到各路接收机Z,放大、变频,进入I/Q形成分机,再通过高速数字接口进入DBF运算网络,得到外场校正数据:

如果雷达在同等外部环境、同等系统状态下,得到[Y内]校、[Y外]校,那么将其组合形成:

式(6)中包含了行波馈源耦合系数A和天线各个单元的通道特性B,与接收机Z无关。而各种馈线元器件的加工、安装公差、元器件更换等存在相当大的随机相位误差,这类误差较为稳定,一旦天线调试、安装结束,数据基本不再变化,A、B精确测量校正一次就可以了。将该数据AB-1保存在存储器中,用来形成校正系数。
雷达实际工作时,每次开机都必须用内部测试信号来校正接收机由于时间和温度等因素引入的各路接收机幅度和相位的不一致,即得到:

因为一旦天线调试、安装结束,A基本不再变化,即A=A′。故:

这样就得到了需要的一组N个阵列的接收校正系数Cn,直接参加DBF(L)运算网络的运算得到L个形成的波束。考虑到大容量、高速率、高密度实时数据运算以及各种数据的存储、通道校正数据的采集和处理,综合分析,采用低压差分传输(Low Voltage Differential Signal,LVDS)方式解决多路数字中频采样与波束形成的数据传输问题,采用3片ALTERA公司的FPGA:EP1S60F1020完成DBF运算,采用AD公司的通用DSP:ADSP21060完成通道校正,并形成电路所需的权系数[4-5]。系统连接框图如图3所示。
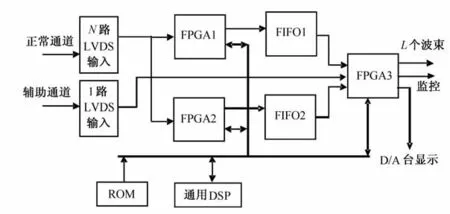
图3 系统连接框图
LVDS芯片采用DS90CR286,每块芯片能够传输5路数据,FPGA1和FPGA2分别形成所需的波束,并在FPGA3中串行输出,FPGA3还送出数据给监控系统和D/A显示。辅助通道用来完成如副瓣对消、副瓣匿影以及发射通道数据采集等功能。接收校正程序框图如图4所示。
发射校正是利用幅相监测通道采集各行发射通道数据,分析获得各通道幅相差,通过移相器补偿使得各行的幅相一致性。发射校正也有外场校正和内场校正2种方式:外场校正是让每个通道依次通过天线把发射信号发射出去,再把外场接收的回波信号与参考信号比较,得到各发射通道的幅相误差;内场校正是将发射信号从天线耦合端耦合出来,经矩阵开关依次切换各路信号,再把矩阵开关的输出与参考信号相比较得到发射通道的幅相误差,此误差再加上天线、矩阵开关等固定误差,便得到等效的外场校正误差。在此仅讨论内场校正,发射校正的算法如下:

式中,Y为幅相监测通道采集的数据;Aejφ是要求的幅相数据;d为阵元间距;λ为发射波长。若令:

则式(9)可以简化为:

用矩阵形式简写为:


图4 接收校正程序框图
显然,只要P由N个线性无关向量构成,则P的逆矩阵存在并可求,式(10)的定义能满足这个要求。从而有:

可以利用计算机先求出矩阵P的逆矩阵,作为常量存入DSP内。然后在发射校正模式下采集Y数据,就可求出发射校正后的X。对于程序设计而言只是两重循环的乘法累加而已。将这个数据送往波控计算机,按其相位值控制移相器,即完成一次发射校正。一般只需进行2~3次发射校正,系统各个发射通道相位差异即可收敛到较好状态[6]。
3 结 语
以上方案已经在某型号的雷达中得到应用,从实际使用情况来看,系统工作稳定可靠,能满足系统各项指标要求。
[1]丁鹭飞,耿富录 .雷达原理 [M].西安:西安电子科技大学出版社,2003.
[2]张光义 .相控阵雷达系统 [M].北京:国防工业出版社,1994.
[3]张贤达 .现代信号处理 [M].北京:清华大学出版社,1995.
[4]Merrill I.Skolnik雷达手册 [M].第2版 .北京:电子工业出版社,2003.
[5]曹俊锋,许建文,方云 .接收DBF雷达系统校正技术 [J].火控雷达技术,2007(4):63-67.
[6]赵淑清 .误差校准后DBF方向图的精度 [J].电子与对抗,1996(2):16-20,57.