钢带锁扣装置运动结构仿真分析
2013-12-03李志钢
程 铭,许 平,刘 军,姚 辉,李志钢
(1.昆明理工大学机电工程学院,云南 昆明 650500;2.金川集团有限公司精炼厂,甘肃 金昌 737104)
0 前言
板材打捆机是自动化板材打捆线上的重要组成部分,而自动化板材打捆线又是板材乃至有色金属原材料生产加工的必要生产线。该打捆机主要包括钢带喂线装置、钢带张紧装置、钢带锁扣装置、工作面顺槽四部分组成。他采用气压控制对打捆用的钢带包装条进行锁扣,弹扣,同时通过气动马达对包装条进行牵引,从而完成对堆叠板材的自动捆扎。钢带锁扣装置是打捆机的重要组成部分,其设计是否合理将直接影响到打捆机的可靠性。本论文针对板材打捆机钢带锁扣装置进行运动学仿真,并对仿真结果进行分析和讨论,得出相关参数和变化规律,对打捆机的研究和设计提供一定的参考。
1 基于Solid Edge模型的建立
图1为利用Solid Edge(SE)与ADAMS联合建模的步骤。在这个过程中需要不断反复地对模型进行修改和校验以及优化,使之最终达到与物理模型一致的效果,使得模型在ADAMS中的仿真能够可靠进行。
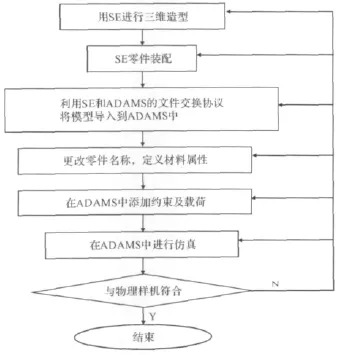
图1 SE与ADAMS联合建模步骤Fig.1 Steps of SE and ADAMS joint modeling method
在真实装配中锁扣装置相关零件较多,过多的零件不利于ADAMS中的模拟仿真,在不影响仿真结果和视觉效果的前提下,对锁扣装置外壳及其与机架的固定支撑点结构进行了简化。多个零件固结时,可以只用一个零件表示,以节省运动副数量,减少计算误差。图2所示为Solid Edge中简化后的打捆机锁扣装置装配结构。
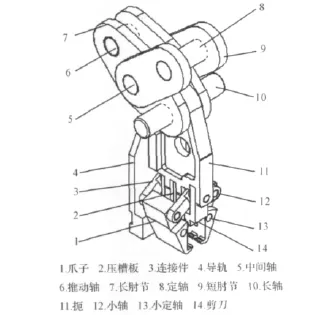
图2 锁扣装置结构Fig.2 Structure of locking device
2 模型导入ADAMS并进行仿真分析
SE软件提供了3种类型的可与ADAMS/View进行图形交换的文件格式,即IGES、STEP两种标准图形交换格式和Parasolid格式。在将模型导入到ADAMS中时,选择Parasolid文件格式导入模型。Parasolid文件格式可以与ADAMS相互转换而几乎不丢失任何信息,而且转换速度较快。
在打开ADAMS时选择 Import a file,并在start in中选定parasolid文件的路径即可将SE输出的模型导入ADAMS中。导入模型后,各个零部件没有质量,需要对各个零件定义材料属性,可选择“steel”作为材料类型,同时为了编辑方便,对各个部件重新命名。命名后各部件如图3所示。
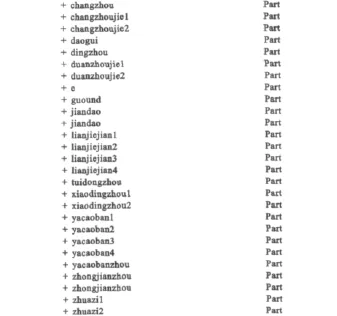
图3 ADAMS中各零件明细Fig.3 List of parts in ADAMS
锁扣机构工作原理为通过气缸活塞带动推动轴,使推动轴在x轴方向实现往复直线运动。定轴与机架相连,通过由长肘节与短肘节组成的肘节机构实现传动,从而带动扼的运动。同时在外壳导轨的约束下,使扼在z轴方向做往复直线运动。小定轴与外壳固定,在扼的z方向往复运动过程中,实现爪子齿刀与压槽板错位相切,使锁扣变形压合后与钢带产生多个破坏性的切口,从而实现锁扣与钢带共同锁死。
模型建立好之后就需要在各部件之间添加约束,推动轴会在气缸的水平x方向推动下做往复式直线运动,且行程是一定的。在此,对推动轴上添加了水平x方向平移副,并且在该运动副上添加了一个速度的驱动。定轴与机架是固定相连的,因此,对定轴添加了与大地的固定约束。同时长轴会穿过机架的滑槽中,滑槽对长轴有一个z方向导向的作用,并且导轨也对扼也有一个z方向导向的作用,为了简化方便,只对扼与导轨设置了一个平移副。外壳导轨作为锁扣机构的外壳,在此设置与大地固定。其他部位零件添加相应的转动副,相同的不影响结果的零件相互添加固定副。各个运动副的添加情况如图4所示。
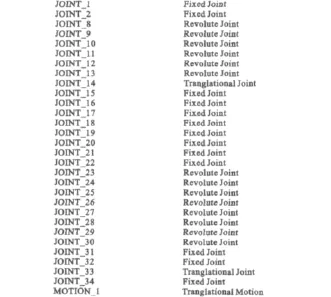
图4 ADAMS中各运动副及驱动明细Fig.4 Detail list of kinematic pairs and driving parts in ADAMS
为了满足锁扣装置的爪子与压槽板合拢实现锁扣的过程,也为了保证爪子与压槽板的往复行程,就必须施加适当的驱动函数,让推动轴在气缸的推动下实现往复式直线运动。经过分析,将往复循环移动的速度驱动函数设置为STEP(time,0,0,0.1,0.02)+STEP(time,0.1,0,1.1,0)+STEP(time,1.1,0,1.3,-0.04)+STEP(time,1.3,0,2.3,0)+STEP(time,2.3,0,2.4,0.02),且steps=200,time=2.4 s,经多次仿真验证,此驱动函数下爪子与压槽板能合拢到实际要求的位置,并最终在2.4 s完成一次往复运动,并最终回复到起始位置。
3 钢带锁扣装置各参数的仿真结果
ADAMS软件仿真分析结果的后处理是通过调用后处理模块ADAMS/Postprocessor来完成。利用ADAMS/Postprocessor模块可以让我们更清晰地观察其它 ADAMS模块(如 ADAMS/View、ADAMS/Car、或 ADAMS/Engine)的仿真结果,也可以将所得到的结果转化为动画、表格、或HTML等形式,能够更确切地反映模型的特性,便于我们对仿真计算的结果进行观察和分析。本文通过在ADAMS/View模块中对导入的锁扣装置运动进行仿真,然后再转入后处理模块ADAMS/Postprocessor中,调出气缸带动的推动轴的速度和位移参数的变化曲线图,以及最终爪子部位和压槽板的速度、位移变化曲线图。通过观察分析各参数的变化曲线图,可以为将来进一步研究和设计锁扣装置提供有效参考依据。各参数的变化曲线图如图5~图10所示。
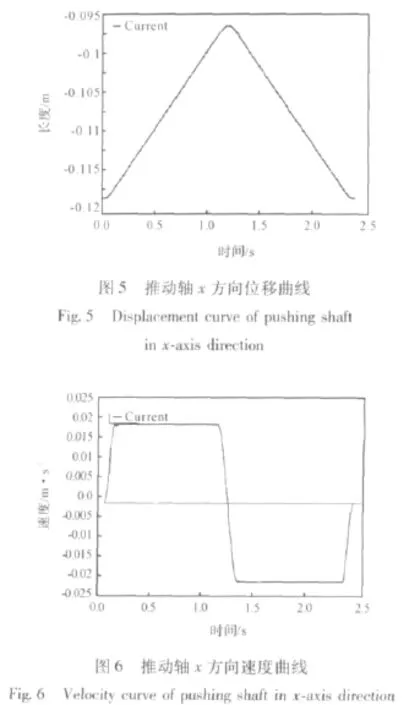
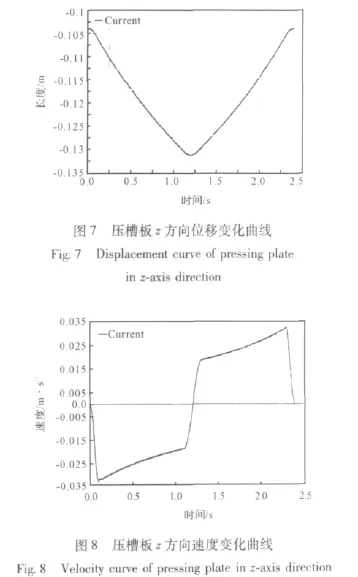
通过图5、图6可以看出推动轴位移变化平稳,0~0.1 s、1.1~1.3 s、2.3~2.4 s时,由于气缸活塞启动、反向推动以及停止,使推动轴在存在较大加速度,该加速度大小为0.2 m/s2,0.1~1.1 s、1.3~2.3 s时推动轴以0.02 m/s的速度保持匀速运动。
通过图7、图8可以看出压槽板位移变化稳定,但在推动轴存在加速度时,压槽板速度变化剧烈;推动轴匀速运动时,压槽板速度变化平稳。0.1 s及2.3 s时压槽板在z轴方向速度大小为最大值。
通过图9、图10可以看出在推动轴存在加速度时,爪子位移缓慢变化,但速度剧烈变化。此外在推动轴匀速运动时,爪子的质心存在速度矢量模为0的过程。
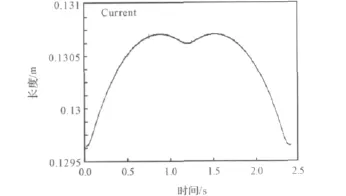
图9 爪子Mag位移变化曲线Fig.9 Displacement curve of claw in Mag direction
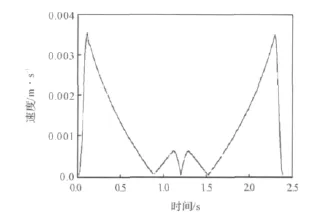
图10 爪子Mag速度变化曲线Fig.10 Velocity curve of claw in Mag direction
4 结论
(1)推动轴经过气缸推动得到的速度、位移变化符合液压缸活塞的运动过程,在活塞的启动、停止以及反向运动的过程中短时间内会产生较大的加速度;
(2)气缸活塞启动、停止、反向运动会产生剧烈速度变化,该变化会对压槽板的运动过程产生冲击;
(3)爪子锁扣过程的位移变化正常,但是速度变化较为剧烈,容易产生冲击。
[1]李华,李世芸.Solid Edge V18三维设计教程(2版)[M].北京:科学出版社,2008.
[2]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[3]陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[4]杜连明,昃向博,王玉增,等.基于Solid Edge及ADAMS的牵引卷简机构运动仿真[J].南京航空航天大学学报,2005,37(S1).
[5]李成群,杨春彬,李建功.新型全自动棒材打捆机的研究[J].机床与液压,2012(4).
[6]沈健,陆大绚.Solid Edge基础与实例精解[M].北京:机械工业出版社,2004.
[7]李军,刑俊文,覃文洁.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[8]黄东,贾民平.基于ADAMS的两级液压油缸建模与仿真[J].信息技术,2010(1).
