半导体激光引信光学参数测试技术研究
2013-12-03范卫东
李 喆, 范卫东, 李 源
(中国空空导弹研究院,河南 洛阳471009)
0 引言
半导体激光引信是随着激光技术的发展而实现的一种主动式近炸引信[1],引信本身发射激光光束,这一激光光束到达目标发生反射,部分反射激光被引信接收系统所接收变成电信号,经过实时处理实现对目标探测[2]。半导体激光引信具有较强的抗外界电磁场干扰的能力,能够实时精确探测目标,在空空导弹中得到了广泛的应用[3]。
半导体激光引信光学系统是半导体激光引信的重要组成部分,高素质的、稳定的、按指标实现的光学系统对引信总体性能的实现是一个基本保障,光学参数的各项性能指标直接关系到引信乃至整个武器系统的质量,因此对半导体激光引信各项光学参数的测试显得极为重要。半导体激光引信光学参数主要包括半导体激光发射系统和接收探测系统的各项参数,目前在实验室内,对半导体激光引信光学参数测试包括发射光束束散角、发射光束倾角、接收系统光轴角度、接收系统视场角度测量[4]。本文对半导体激光引信主要光学参数测试技术进行了研究分析,通过一种半导体激光引信光学参数测试系统实现了各项光学参数的全自动综合测试。
1 半导体激光引信主要光学参数原理
半导体激光引信的探测区域由发射光束和接收视场交叉形成,由图1所示。图示箭头指示圆周方向为视野方向,垂直视野方向平面的方向为视场方向。根据某型武器系统要求,半导体激光引信各个光学参数定义如下,角度a:接收系统视场角2°~4°;角度b:发射光束束散角,60′;角度c:发射光束倾角90′;角度d:接收系统光轴角度50′~80′;视野角度设定为±40°。
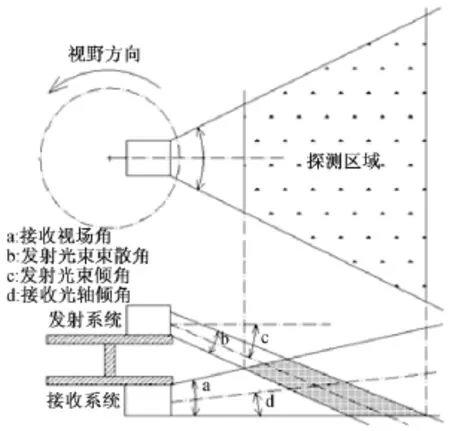
图1 半导体激光引信光学参数示意图
1.1 光学发射系统
光学发射系统由半导体激光器、准直系统、扩束系统三部分组成,框图如图2所示。

图2 光学发射系统框图
半导体激光器在垂直、平行PN结方向具有一定发散角。半导体激光器发光面尺寸在垂直PN结方向较小,而在平行PN结方向则要大的多,考虑在易于准直的垂直PN结方向进行准直,在平行PN结方向对光束进行扩束,以满足光束束散角的要求。利用Light Tools光学软件对该光学发射系统进行模拟仿真,如图3所示。
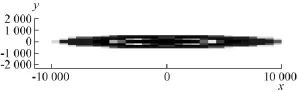
图3 Light Tools光学软件对发射光束仿真图
1.2 光学接收系统
图4(a)为光学接收系统光路示意图,整个接收光学系统由反射镜1、带通干涉滤光片2和探测器3组成。反射镜是整个系统的核心,在视场方向,一定通光孔径和特定反射面型的反射镜与探测器相互形成了合乎要求的接收空间视场,回波以不同的角度入射至反射镜的入口,经过反射镜的反射聚焦在探测器上,如图4(a)所示。同时,在视野方向光学接收系统是利用侧面反射面的反射作用来增加视野角度,如图4(b)所示。
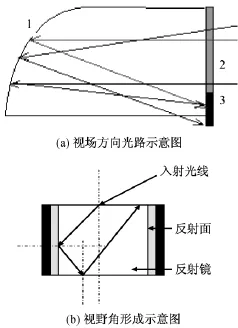
图4 光学接收系统示意图
2 半导体激光引信光学参数测试系统
半导体激光引信光学参数测试系统原理示意图、原理框图,如图5、图6所示。它由光学参数测试系统和测试控制系统两大部分组成,经纬仪装置用于调整检测控制台台面水平、被测引信(视野转轴1)与象限转台(转台轴2)同轴性和垂直度。

图5 半导体激光引信光学参数测试系统原理示意图
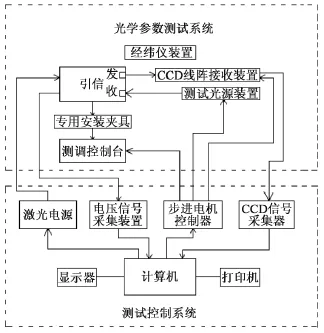
图6 半导体激光引信光学参数测试系统原理框图
2.1 光学发射参数测试系统
线阵CCD结构简单,能够快速完成光电信号变换实现动态测量,具有测量精度高、稳定性好、抗干扰性强等优点,输出信号经过二值化处理可准确确定物体外形、位置等[5]。基于以上特点,线阵CCD在精确测量系统中广泛引用,原理如图7所示。
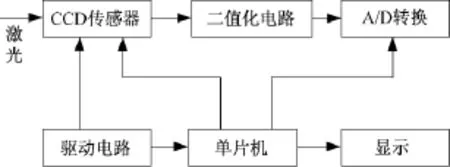
图7 线阵CCD原理示意图
应用前后位置的两个线阵CCD实现对光学发射参数的测试,采用的线阵CCD具有三色多像元感应功能及较高的灰度分辨能力。系统采用如图8结构的分束棱镜线阵CCD采集系统,该系统将激光光束在同一个角度内分成两束同时进行测量,分束棱镜上加装光阑保证两个线阵CCD测试光束的一致性,同时采用多像素、微米级像元构成的线阵CCD保证测试精度。该采集系统由线阵转台和线阵高度台控制保证对发射光束的精密对准和大倾角宽光束的测量。

图8 分束棱镜线阵CCD采集系统(俯视图)
2.1.1 发射光束倾角测试
首先将引信固定在一个与水平面平行的转台上,CCD线阵系统也需调整到与水平面平行且正对发射组件出光面。发射光束倾角在CCD上成像示意图如图9所示。发射光束在CCD1和CCD2上成像的最大值点与CCD交点分别为1、2,1和2的连线可以视为发射光束倾角(光轴),1、2两点在CCD1和CCD2上成像位置高度为hc,hc可由软件像素差得出;CCD1与CCD2间距为L,L为固定值,由图9可得

Δhc可测,由上式可得发射光束倾角c。
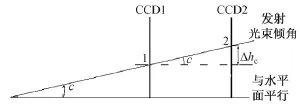
图9 发射光束倾角在CCD上测试示意图(侧视图)
2.1.2 发射光束束散角测试
由前项测出光束倾角c,微调CCD接收器倾角c°,使两CCD垂直光轴。此时发射光束垂直打到CCD1和CCD2上,由于光束束散角的存在,CCD位置调整后光束的成像示意图如图10,1、2、3、4点由最大能量的1/2处确定。

图10 CCD位置调整后光束的成像示意图(侧视图)
从图10可得光束上沿在CCD2和CCD1上成像位置高度差△h1;光束下沿在CCD2和CCD1上成像位置高度差△h2:
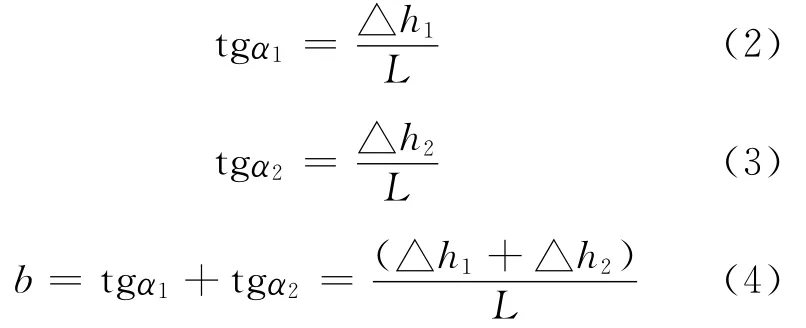
L固定,△h1+△h2可由两个CCD像素差确定,可得发射光束束散角b。
2.1.3 实验结果及分析
用分束棱镜CCD线阵采集系统进行测试,测试数据,如表1所示。
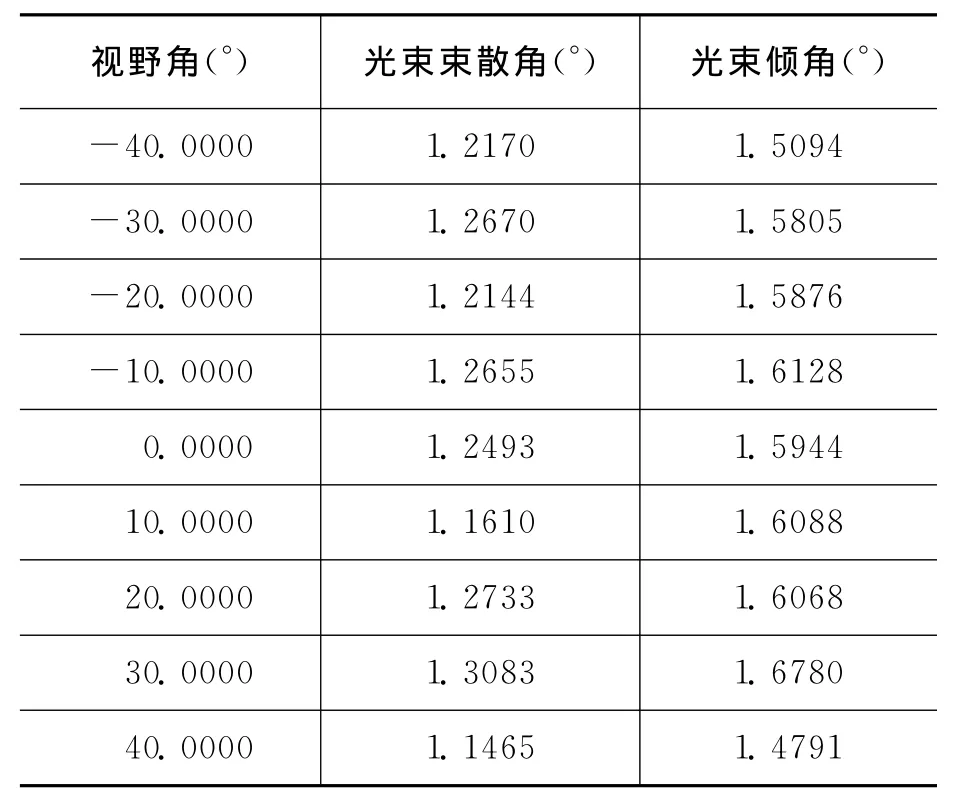
表1 分束棱镜CCD线阵采集系统测试数据
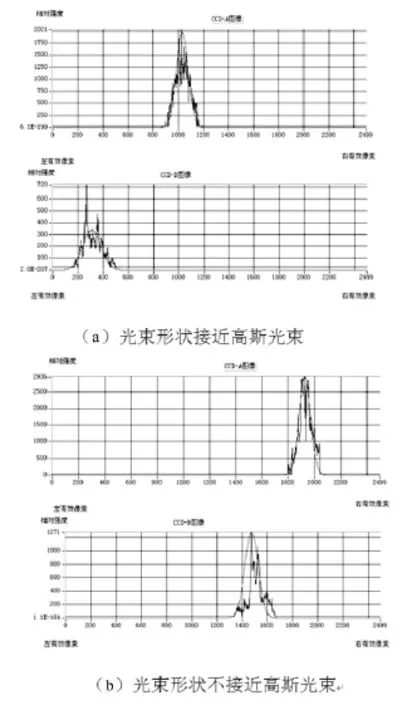
图11 线阵CCD测试结果
发射系统光束倾角基本与设计要求相同。但是,发射系统束散角数据有些偏大,分析是由于CCD对半导体激光的响应度较高,在计算拟和过程中出现误差造成。如图11(1)所示,在光束形状接近高斯光束时,拟和曲线与光束形状相近,如图11(2)所示,在光束形状不接近高斯光束时,拟合图形与原图有一定差别,周边有一些较大毛刺,会使拟和曲线有一定的展宽,计算角度时截取最大能量值的1/2点,造成了角度计算值出现差别,这需要针对毛刺过大光束采用更有效滤波拟合,使结果更真实的反映发射组件光束情况。
2.2 光学接收参数测试系统
对光学接收视场光轴、接收视场大小的确定需要借助外界准直光源系统,要求该光源系统输出光束能覆盖整个接收窗口,保证在变换较大入射角度时还能全部覆盖,该光束有较好的准直性,保证经过一定光程不会发散。该系统采用一种长焦距的单透镜平行光管,实现了高斯光束的准直,准直后光束具有高质量的出射波前和均匀的光强分布[6]。图12是进行光学接收参数测试的光路示意图,由平行光管组成的准直光源系统输出准直光束经过光源转台反射变为垂直水平面的光束,再经过反射镜反射形成水平方向光并覆盖接收窗口,通过光源高度台和反射镜的随动,实现了光路以产品接收窗口为中心的角度变化,完成各个角度的探测器电压输出测量。
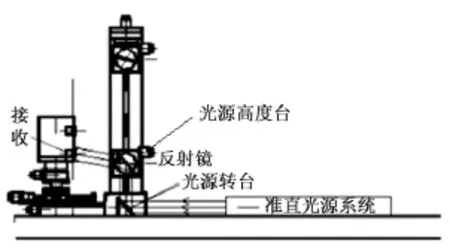
图12 接收组件视场方向测试光路图
2.2.1 光学接收系统光轴、视场角测试
光学接收系统各个参数测量光路示意图如图13图示。系统设计光源轴与方位转台轴距离为l,接收窗口中心与光学平台台面高度距离为h。当接收系统光轴处于水平位置,反射镜镜面中心在接收系统光轴上,反射镜倾斜角度k1=+45°。设此时镜面中心高度为0位移。根据产品设计的视场角α,调节反射镜位移高度为h和倾斜角度为k,h和α值按式(5)、(6)计算得到。

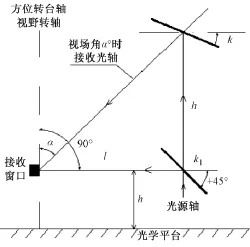
图13 接收组件光学参数测量光路示意图
根据软件控制反射镜转台改变反射镜倾角,实现了光束以产品接收窗口为中心的各个角度入射,连续测试纪录反射镜倾角和对应探测器输出电压值,并找出探测器输出电压最大值U,并与U值进行比较,找出对应1/2 U的反射镜倾角a1和a2,2×(a2-a1)即为该象限接收视场角a。反射镜倾角与探测器输出电压关系示意图如图14所示。

图14 反射镜倾角与探测器输出电压关系曲线
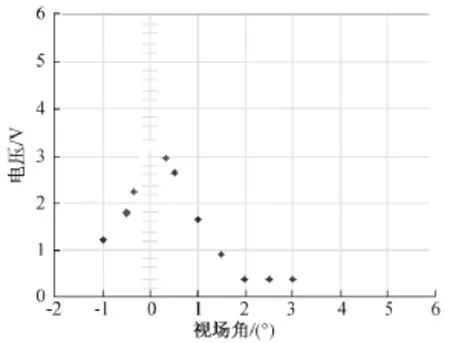
图15 视场方向电压测试图
图15是光学接收系统某视野角度下的视场方向电压测试图,为了得到更为精确光轴位置,在一定范围内进行密测。
2.2.2 实验结果及分析
应用图12所示系统进行测试,测试数据如表2所示。

表2 系统测试数据
接收机光轴位置在1°左右,与设计要求基本吻合,在个别视野角度下偏差有些大,原因与探测器粘接时有微小的凹凸变化有关;视场角绝对值与设计要求相比偏小,分析主要与视场边界定义有关,如图15所示,选取U/2与选取U/e时边界的范围是不同的,软件处理方式的改变会影响视场角度的数值。
3 结论
通过对半导体激光引信光学参数测试技术的研究分析,深入剖析了各个光学参数的含义及机理,构建了一个半导体激光引信光学参数测试系统。该系统将机械、光学与电子三大系统通过计算机软件结合起来,实现了半导体激光引信光学参数全自动测量以及最终的数据处理,经过分析验证,能够满足半导体激光引信光学参数测试要求。
[1] 崔占忠,宋世和,徐立新.近炸引信原理[M].北京:北京理工大学出版社,2006:70-120.
[2] 李静海.空空导弹引信技术发展趋势分析[J].国防技术基础,2006,(8):26-30.
[3] 王建国,杨高潮.空空导弹激光引信的基本问题与改进方向[J].航空兵器,2006,(3):41-44.
[4] 雷訇,李强,左铁钏.大功率激光光束参数的测量方法[J].光电子·激光,2000,11(4):372-374.
[5] 王庆有.CCD应用技术[M].天津:天津大学出版社,2000:30-70.
[6] 吉小辉,孙后环,周必方,等.大视场平行光管光学系统的研制[J].光学仪器,2008,30(1):55-58.