基于免疫粒子群算法的闭塞分区划分优化设计
2013-11-27陈永刚林俊亭
康 宁,陈永刚,林俊亭,曹 岩
(1.兰州交通大学自动化与电气工程学院,兰州 730070;2.兰州交通大学电子与信息工程学院,兰州 730070)
目前,我国铁路线路里程正在不断的增加,同时要保证在自动闭塞制式下,不同列车在通过相隔数个闭塞分区时,能实现同一区间内的安全追踪运行。列车相隔分区数目越少,追踪间隔时间则越短。而根据列车扣除系数经验公式,追踪间隔时间越短,列车通过能力就越大[1]。因此,为了保证行车安全,提高列车运输能力,需要对闭塞分区划分问题进行进一步的优化。
近年来,在闭塞分区划分问题研究方面,有关学者都取得了一定的成果。国外学者曾使用梯度搜索算法[3]、DE(differential evolution)算法[4]、遗传算法[5]、最大-最小蚁群算法[6]等人工智能算法针对城市轨道交通系统进行了闭塞分区的划分研究;而在国内方面,2011年刘剑锋等人对准移动闭塞方式下列控系统为CTCS2级的铁路区间通过信号机布置设计了启发式仿真算法[7];卫和君通过对人控驾驶模式下列车追踪间隔时间的计算方法,实现了对客运专线CTCS-3级列控系统的闭塞分区划分[8]。但这些研究都很少将优化算法应用于干线铁路自动闭塞分区划分中,干线铁路所要考虑的约束条件更多且更为复杂。而免疫粒子群算法通过按比例复制高亲和度抗体,添加变异算子,为新个体产生提供途径,增加了种群多样性,可实现闭塞分区快速、准确划分。
1 闭塞分区划分模型
1.1 模型定义
如图1所示,设两站间信号机的架数Nsignal,每架信号机的位置为 xi(i=1,2,…,Nsignal);x0、xNsignal+1分别为两车站间出站信号机、进站信号机的位置坐标,则计算闭塞分区长度是

图1 变量定义描述
1.2 目标函数
闭塞分区划分问题是在保证行车安全及具体施工要求的约束条件下,找出划分节点,求得最短追踪间隔。它是一个复杂的多目标多约束问题,为此,本文建立两种策略下的划分模型。
“效率”策略是指在列车制动距离和闭塞分区有效长度满足的情况下,通过最小化追踪列车间隔时间得到最大的列车通过能力,进而提高自动闭塞区段上的列车运行数目。其目标函数为

其中,Ik为列车追踪间隔,在四显示自动闭塞制式下前后行列车应间隔4个闭塞分区追踪运行;v为列车运行的速度;i为在闭塞分区范围内划分节点数目,i=1…n;max(I1,I2,…,Ii,…,Ik)为由出站信号机经 k+2架通过信号机至进站信号机最长追踪间隔。
“经济”策略是指在列车追踪间隔时间确定的前提下,最小化信号机的数目。其目标函数为

其中,Nsignal表示两站间信号机的架数即划分。
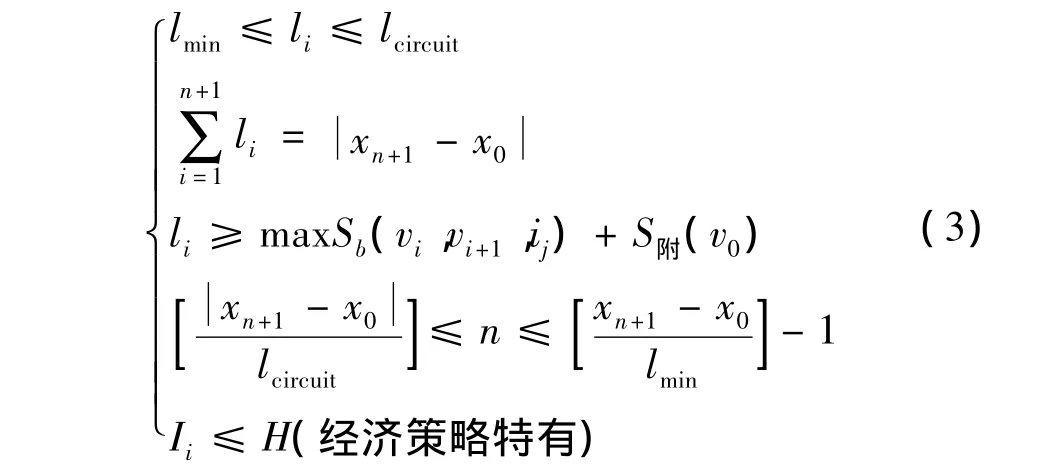
1.3 约束条件
闭塞分区实际划分时要考虑多个约束条件,如式(3)所示,包括列车紧急制动距离、轨道电路长度、区间最小分区数目等,其中lmin为工程人员由现场实际情况确定的闭塞分区的最短长度,lcircuit为轨道电路极限长度,划分节点数n=N+1,H为预先设定追踪间隔时间。制动距离Sb和附加距离S附长度之和为闭塞分区长度 li,max Sb(vi,vi+1,ij)为列车自坡道值 ij处从高速度等级vi+1降至相邻低速度等级vi的最大制动距离。
1.4 适应度函数
构造适应度时引入罚函数法,将一个足够反映约束条件的惩罚项包含到适应度函数中,对复杂的约束优化问题进行无约束处理,通过惩罚因子大小的选取调节适应度函数的惩罚力度,从而影响算法的收敛速度。
效率策略下适应度函数为
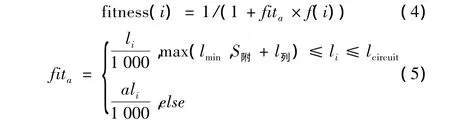
在式(4)和(5)中,a为惩罚因子,取值范围为10~20。公式(5)说明闭塞分区长度不满足实际轨道电路极限长度和紧急制动距离时,适应度值减小。
经济策略下的适应度函数为
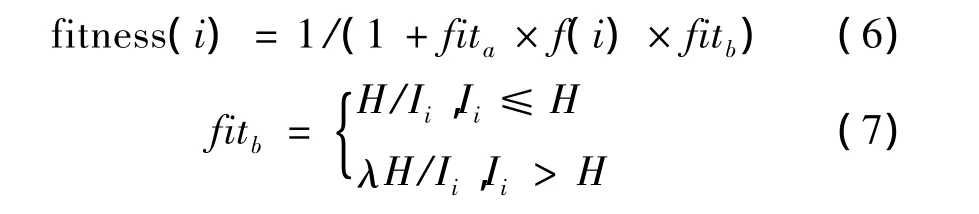
在式(6)和(7)中,λ为惩罚因子,取值范围为10~20。公式(7)说明追踪间隔大于给定追踪间隔时,适应度函数值减小。
2 免疫粒子群算法优化过程
2.1 免疫粒子群算法总流程图
IA-PSO算法可分为两部分,如图2所示,一为基本PSO算法,用于控制基本的优化迭代过程。当算法在运行过程中,某一粒子发现最优解,其余粒子就会聚集,种群多样性降低,如果发现其为局部最优解,粒子群无法再在解空间继续搜索,陷入早熟收敛。二为引入人工免疫机理,经过克隆复制,柯西变异,克隆选择算子,加大种群多样性,增强全局搜索能力。
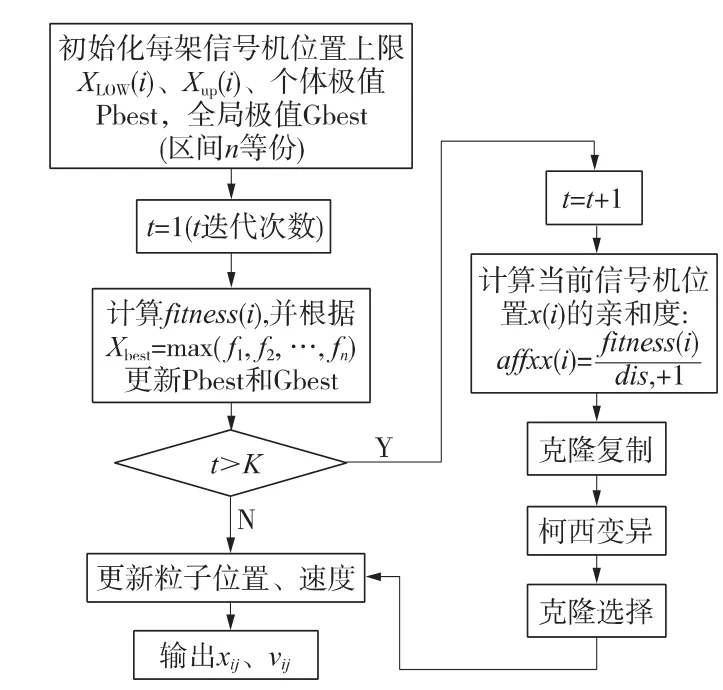
图2 免疫粒子群算法流程
2.2 算法设计
Step1 根据式(2)确定种群数目,即信号机数目n,将区间n等份,线路上第i架信号机位置取值下限:XLow(i)=X(i)-300,取值上限:Xup(i)=X(i)+300,个体极值 Pbest,全局极值 Gbest,维度范围 j∈(1,p)。
Step2 根据约束条件对划分结果影响设计的不同策略下的适应度函数式(3)、(4)、(5)、(6),求解各粒子适应度值;由极值更新策略Xbest=max(f(1),f(2),…,f(n))得到个体极值 Pbest、全局极值 Gbest。
Step3 根据t值是否超过设定阈值K判断是否陷入局部最优解,若Gbest没有更新,累加全局最优解迭代次数t=t+1,t未达到给定阈值K,转向step4,否则,t清零。
Step4 将粒子看做抗体,计算亲和度

其中,disi为第i个粒子与全局最优粒子gbest在第j维度上的距离,即待优化长度与全局极值的距离。
Step5 第i个粒子被克隆复制的数目
通过抗体抑制原理,亲和度值越小,被克隆数目越少,基因优良性越保持。
Step6 进行柯西变异,对于每个克隆个体,根据父代个体亲和度变化采用变异操作。柯西变异的范围随着t值的减小而缩小,当t值确定,父代种群的亲和度连续δ代不发生变化时,选取t(k+1)=0.8*t(k),为抗体x的父代变异体,参数η控制柯西随机变量ijcauchy(t)的衰减。

Step7 进行克隆选择,采用轮盘赌(Roulette wheel)方法将父代适应度函数进行排序,从父代个体中选出适应度最高的粒子作为下一代个体,淘汰适应度较低个体。
Step8 对粒子位置坐标xij和速度vij(即追踪间隔时间)进行更新。其中,学习因子c1、c2为固定值,r1,r2∈[0,1],Pij为当前信号机位置坐标最优解,Pgj信号机位置坐标经亲和度值升序排列后选出的最优位置。

Step9 若满足迭代次数,算法停止,输出xij,vij值,否则转向step2。
3 闭塞分区划分检验
闭塞分区划分检验分为列车追踪间隔检验、列车起动检验,列车停车检验,特殊线路条件检查。主要通过对信号机位置调整,使信号机间的列车追踪间隔小于给定的间隔时间,并通过对速度参数控制,不断计算列车牵引和制动性能并设定制动触发点,根据动能公式、动量定理,牵引时保证列车能够在坡段起动需使列车起动牵引力满足:Fq≥ [Gq(+iq)+P(+iq)]g×103;制动时,在列车达到最大速度前提下,制动距离在闭塞分区划分的范围内,满足:L闭≥(Sb+la)/(M-2),并考虑特殊线路的限制因素,如坡道、曲线半径等,检验模型如图3所示。
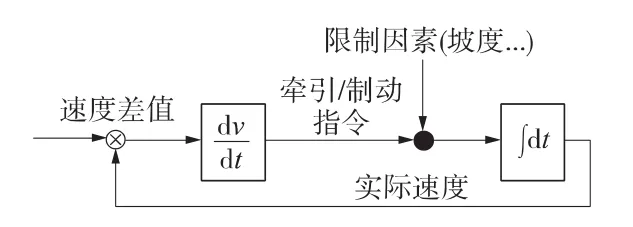
图3 划分检验模型
4 案例分析
选取A站—B站为待布置通过信号机的区间,A站出站信号机位置为270.746 km,B站进站信号机位置为284.026 km,则区间全长13.28 km,设列车在区间平均运行速度为100 km/h,列车长度为800 m,按四显示自动闭塞布置,设闭塞分区最小长度为1 000 m,最大闭塞分区长度为1 400 m,初始种群20个,优化10次,每次最大迭代次数250次,取最优的优化结果输出。图4所示为两种策略下,算法的各代群体平均适应度与最大适应度的变化趋势。
从图4中可以看出,随着迭代次数的增加,群体的平均适应度和最优适应度波动减小,表明算法可以维持种群的多样性,避免早熟收敛发生。在效率策略和经济策略下,算法运行到接近200代群体的平均适应度和最优适应度的减小趋势已较为缓慢,可将算法250代时的计算结果作为最终的布局方案。运行结果见表1,经济策略下追踪间隔为min max(I1,I2,…,Ik)=3.96 min,效率策略下追踪间隔为3.25 min,预先设定的列车追踪间隔为5 min,并且经检验所有信号机满足制动距离要求,说明算法是有效的。
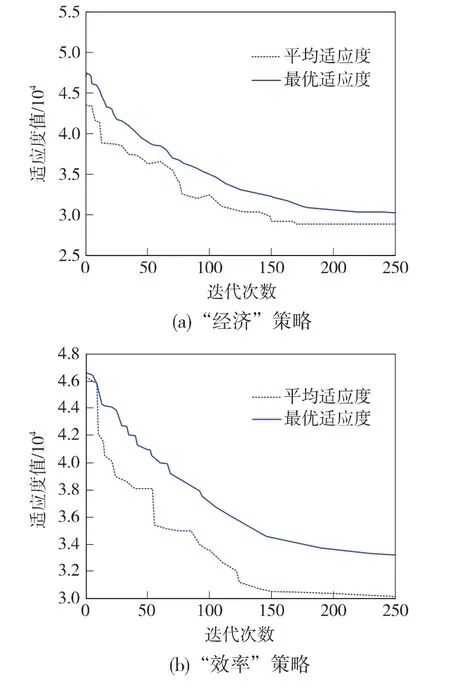
图4 群体适应度变化曲线

表1 基于免疫粒子群算法的优化结果
评价算法性能时,Ef为波动率,反映了初始条件下逼近最优解的程度,如图5所示,其值越小,说明算法的鲁棒性越好。

式中,C*为问题的期望最优值;Ca为算法多次运行所得的平均值。

图5 波动率曲线
Ef1、Ef2分别为“经济”和“效率”下的波动率。试验结果表明,IM-PSO法运行到250次得到最优解,波动率小,算法鲁棒性好。
5 结语
使用免疫粒子群算法对信号机的数目和位置进行初始化,并对种群进行克隆、变异、选择等操作,完成列车追踪间隔检验和列车起停车检验,实现闭塞分区的快速、准确划分。最后通过实际案例,考虑“经济”、“效率”等因素对该算法进行验证,结果表明该算法确实能改善闭塞分区的优化划分。
[1]董昱.区间信号与列车运行控制系统[M].中国铁道出版社,2008.
[2]Gill D C,Goodman C J.Computer-based optimization techniques for mass transit railway signaling design[J].IEE Proc-B,1992,139(3):261-275.
[3]Chang CS,Du D.Improved optimization method using genetic algorithms for mass transit signaling block-layout design[J].IEE Proc-Electr.Power Appl.,1998,145(3):266-272.
[4]Ke B.R,Chen M C,Lin C L.Block-layout design using MAX-MIN ant system for saving energy on mass rapid transit systems[J].IEEE Transactions on Intelligent Transportation System,2009,10(2):226-235.
[5]卫和君.客运专线CTCS-3级列控系统牵引计算与闭塞分区划分技术[J].铁路技术创新,2010(5):24-28.
[6]于宗艳,韩连涛.免疫粒子群优化算法及应用[J].计算机仿真,2008(12):208-211.
[7]雷德明,严新平.多目标智能优化算法及其应用[M].北京:科学出版社,2009.
[8]刘澜,杜文.多信息自动闭塞列车速度——间隔控制模型及算法[J].铁道学报,2000(6):8-12.
[9]毛保华.列车运行计算与设计[M].北京:人民交通出版社,2008.
[10]卫和君.铁路自动闭塞分区划分技术展望[J].长沙铁道学院学报,2003,21(4):99-102.
[11]薛长虹.青藏铁路关角特长隧道内自动闭塞设计探讨[J].铁道标准设计,2012(4):127-130.
[12]傅世善.自动闭塞设计的新理念[J].铁道通信信号,2004,40(5):16-18.
