CTCS3级列控车载协同仿真子系统的研究与实现
2013-11-27张亚东
刘 霄,张亚东,郭 进
(西南交通大学信息科学与技术学院,成都 610031)
随着高速铁路的快速发展,列车运行速度越来越高,行车间隔不断缩短,如何保障高速铁路的行车安全,成为当前高速铁路科学发展的重大科研问题。高速铁路系统由高速列车[1]、列控系统[2]、牵引供电[3]、铁路线路[4]等子系统组成。其中列控车载子系统负责为高速列车的运行提供控制信号,它的正确与否,对行车安全起着至关重要的作用。国内外针对列控车载子系统进行了大量的仿真研究,文献[5-7]提出了车载中列车速度防护的算法;文献[8-9]按照不同的功能模块划分实现了列控车载仿真系统;文献[10-12]对列控车载子系统进行了仿真测试。上述研究提供了很多设计、实现和测试方法,但是缺少和高速列车、牵引供电、铁路线路等其他高速铁路子系统的联合仿真,与高速铁路实际运营情况相差较大,仿真结果的可信性较低。
本文通过研究如何实现高速铁路耦合大系统下列控车载子系统与其他专业子系统之间的协同仿真,验证高速铁路设计的安全性能,对于保障我国高速铁路的运营安全具有重要意义。
1 列控车载协同仿真子系统对外接口及内部结构
1.1 车载协同仿真子系统对外接口
在高速铁路耦合大系统中,车载协同仿真子系统从列车自动驾驶子系统获取列车控制方式、缓解、启动指令和任务结束命令等;根据列控地面子系统提供的移动授权信息,结合高速列车动力学仿真子系统计算得到的列车位置和速度信息,完成列车速度防护曲线的计算,并生成控制命令;向自动驾驶子系统和牵引传动子系统发送行车指导信息;实时记录仿真结果数据,存入高速铁路系统基础数据库。通过不同专业系统间的耦合仿真,较好地模拟了高速铁路的实际运营情况。车载协同仿真子系统与耦合大系统间的接口如图1所示。
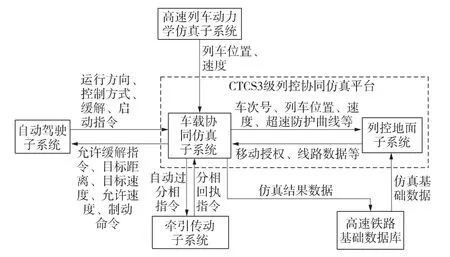
图1 车载协同仿真子系统与耦合大系统接口框图
1.2 车载协同仿真子系统内部结构
根据耦合大系统的功能需求,车载协同仿真子系统分为数据交互及处理、车载计算与速度防护(ATP)、DMI和仿真数据记录等4个子功能模块,如图2所示。
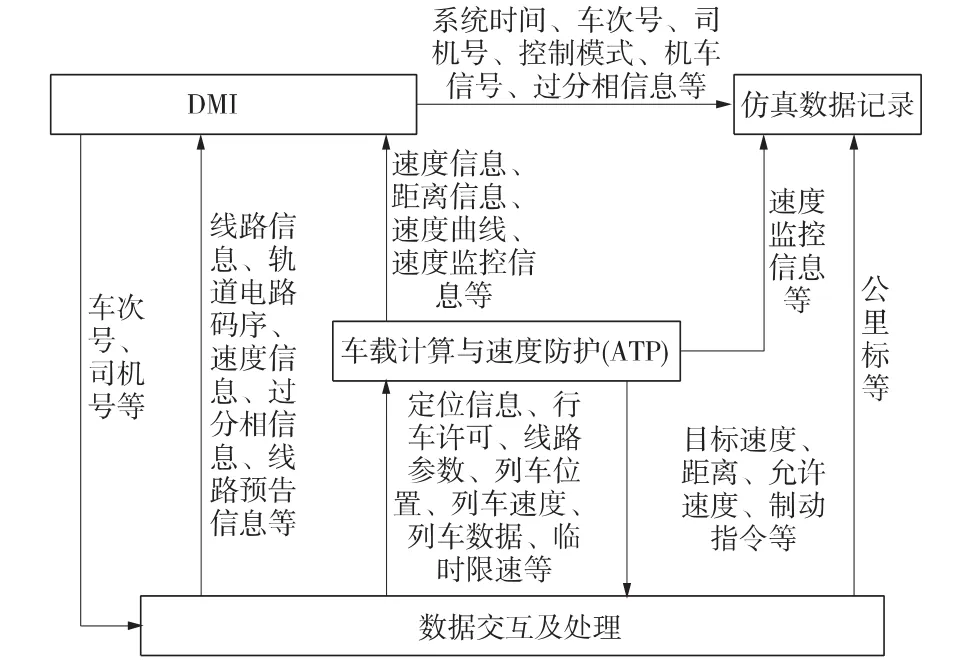
图2 车载协同仿真子系统结构
数据交互及处理模块负责完成车载协同仿真子系统与列控地面、列车自动驾驶、高速列车动力学、牵引传动子系统和高速铁路系统基础数据库之间的数据交互,并对收发的数据进行处理。车载计算与速度防护(ATP)模块根据数据交互及处理模块提供的列车运行参数、移动授权等信息,计算生成最限制速度曲线和目标-距离速度防护曲线,实现速度防护。DMI模块根据规范[13],完成列车运行信息的显示,并提供司机输入数据接口。仿真数据记录模块实时将仿真结果数据存入高速铁路基础数据库。
2 CTCS3级列控车载协同仿真子系统实现
列控车载协同仿真子系统负责保障行车安全,记录运行数据等,因此它的设计一方面要研究速度防护算法,根据从自动驾驶、高速列车动力学和列控地面子系统获得的数据,设计仿真逻辑,实现速度防护;另一方面要考虑与自动驾驶等子系统进行数据交互的时序。由于车载协同仿真子系统需要与多个子系统建立通信连接,启动过程复杂,因此需要严格控制数据交互的内容及时序,确保高速铁路耦合大系统协同仿真顺利进行。
2.1 列车速度防护曲线计算
列车速度防护曲线包括紧急制动曲线和常用制动曲线[14]。紧急制动曲线保证了列车在最不利的情况下采取制动,而不会超出目标距离和目标速度。常用制动曲线是为降低列车触发紧急制动频度,提高列车运行的稳定性和舒适性而设定的。因此,紧急制动曲线是列车速度防护曲线计算的核心。当前列车速度防护多采用目标-距离模式曲线方式[15-16]。该方式根据一次制动曲线进行制动,能有效减小行车间隔。根据该方式,进行列车紧急制动曲线计算的方法如图3所示。
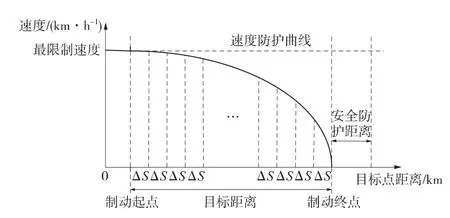
图3 紧急制动曲线计算方法
首先,根据目标距离确定制动终点,从制动终点开始计算,以ΔS为步长,根据公式(1)进行迭代计算,直到计算结果v2大于或等于最限制速度,并将该段起点作为制动起点。

式中 v1——列车制动初速度,km/h;
w1——单位坡道附加阻力,N/kN;
w0——单位基本阻力,N/kN;
b——单位制动力,N/kN;
r——转动惯量系数;
v2——列车制动末速度,km/h。
2.2 速度防护仿真实现
为保障列车安全运行,提高舒适性,车载协同仿真子系统需要根据从高速列车动力学仿真子系统获得的列车当前位置和速度,以速度防护曲线为基础,实时进行超速判断。当列车超速时,及时向列车自动驾驶子系统发送相应的制动命令。
列车速度防护过程需要综合考虑列车运行等级、故障情况等因素。不同等级下速度防护曲线计算所需的数据获取方式不同;根据故障-安全原则,发生故障时,车载子系统进行降级运行或转换行车模式,并将相应的控制信息发送给其他子系统。具体算法流程如图4所示。
图4中的列车速度防护的算法充分考虑了CTCS2级、CTCS3级以及故障、运行等情况,为高速铁路耦合大系统在复杂环境下运行提供了安全、可靠的控制信息。
2.3 协同仿真时序控制
在高速铁路耦合大系统下进行协同仿真时,列控车载协同仿真子系统的启动,运行和结束过程都牵涉到与其他子系统复杂的数据交互,因此需要进行严格的时序控制。由于需要设计与多个子系统进行数据交互的通信接口,为提高程序的性能,本文采用多线程方法,通过控制线程创建时机,控制启动时序。协同仿真运行过程中,分别在每个线程中设计相应的数据处理函数;最后各线程根据从列车自动驾驶子系统获得的仿真结束指令发出任务结束信息。协同仿真时序见图5。

图4 速度防护算法流程
3 仿真测试
车载协同仿真子系统DMI界面见图6。
车载协同仿真子系统将从高速列车动力学仿真子系统获得的列车当前速度、位置等信息以速度表盘的形式显示;根据从列控地面子系统接收的移动授权以及线路数据,生成制动曲线,显示在坐标区;当前系统时间、GSM-R连接状态、制动预警信息等也以文本或图标的形式显示。

图5 协同仿真时序图
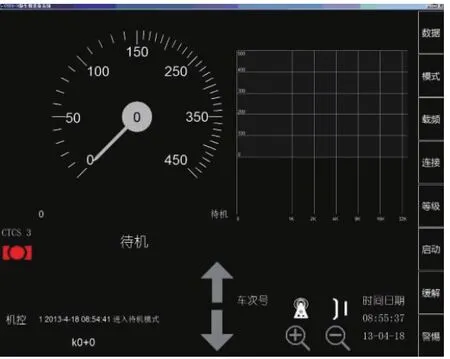
图6 车载DMI界面显示
本文以“郑西客运专线”的实际数据为基础进行协同仿真。
3.1 追踪运行测试
测试结果如图7。图7(a)为追踪列车G1005,图7(b)为前行列车 G1003,从地面子系统界面(图7(c))可以看出,G1005的目标点为G1003所在闭塞分区的始端K965+768。

图7 列车追踪运行
3.2 故障设置
设置GSM-R故障或RBC故障,仿真结果如图8所示。GSM-R/RBC故障前,列车处于CTCS3级运行,坐标区用蓝色阴影显示最限制速度曲线,见图8(a);故障后,车载协同仿真子系统进入CTCS2级部分监控模式,坐标区显示常用制动曲线和紧急制动曲线,如图8(b)所示。

图8 GSM-R故障/RBC故障设置
3.3 临时限速设置
在K940+000~K942+000间设置限速值为80 km/h的临时限速,仿真结果如图9所示。从速度表盘可以看出,临时限速设置前(图9(a)),当前允许速度是350 km/h,目标速度为0 km/h,坐标区显示目标点为移动授权终点;设置临时限速后(图9(b)),当前允许速度为200 km/h,目标速度为80 km/h,目标点为临时限速的起点。
3.4 仿真结果记录

图9 临时限速设置
仿真结果数据在基础数据库中的实时记录见图10。每隔1 s,车载仿真子系统向数据库记录一次仿真结果数据,从图10所示的数据库记录表的表头可以看出,记录数据包括车次号(DMI_ID),线路名(INLINENAME),制动预警时间图标编码(C_INT_BM)等。

图10 数据库中的仿真数据记录
4 结论
在高速铁路耦合大系统的平台下,研究列控车载协同仿真子系统与高速列车、牵引供电和铁路线路等子系统间的耦合关系,设计并实现了列控车载协同仿真子系统。本文以“郑西客运专线”实际线路数据为基础进行列车追踪、故障设置、临时限速设置等仿真实验,验证了该子系统能够实现与高速列车动力学、牵引传动和自动驾驶等各专业仿真子系统的可靠数据交互,能在复杂环境下保证列车安全运行,可为高速铁路耦合大系统进行高速铁路安全性仿真验证提供有力的保障。
[1]张卫华,张曙光.高速列车耦合大系统动力学及服役模拟[J].西南交通大学学报,2008,43(2):147-152.
[2]YANG Xiaojuan.The Development and Innovative Direction of Train Control System[C]∥the 2nd International Conference on Intelligent Control and Information Processing,Harbin,July 25-28,2011:442-445.
[3]蒋明.高速铁路牵引供电与受电系统建模与仿真[D].长沙:中南大学,2012.
[4]龙许友,时瑾,王英杰,等.高速铁路线路线形动力仿真及乘坐舒适度评价[J].铁道科学与工程学报,2012,9(3):26-33.
[5]Hairong Dong,Bin Ning,Baigen Cai,et al.Automatic Train Control System Development and Simulation for High-Speed Railways[J].IEEE circuits and systems magazine,2010(2):6-18.
[6]HU Xiaohui,ZHOU Xingshe,DONG Jianwu.A Designing Method of Simulation Software for Chinese Train Control System Based on Hybrid Software Agent Model[C]//Proceedings of the Fifth International Conference on Machine Learning and Cybernetics.Dalian,2006:148-153.
[7]郭宁.CTCS2级列控系统超速防护仿真研究[D].成都:西南交通大学,2008.
[8]徐丽,张勇.CTCS3级列控系统车载设备仿真子系统的设计与实现[J].铁路计算机应用,2008,17(5):8-11.
[9]王黎.CTCS3级列控系统车载子系统仿真研究[D].成都:西南交通大学,2009.
[10]修桂生.CTCS-3级车载设备测试平台——列车运行仿真器的建模与实现[D].北京:北京交通大学,2010.
[11]徐丽.CTCS3列控系统仿真测试平台——车载设备仿真子系统的研究[D].北京:北京交通大学,2007.
[12]张仕雄.CTCS-3级列控系统测试序列合理性验证的研究[J].铁道标准设计,2012,12:103-105.
[13]中华人民共和国铁道部.运基信号[2008]670号 CTCS-3级列控车载设备人机界面(DMI)显示规范(V1.0)[S].北京:中国铁道出版社,2008.
[14]上官伟,蔡伯根,王晶晶,等.时速250 km以上高速列车制动模式曲线算法[J].交通运输工程学报,2011,11(3):41-46.
[15]郭宁,杨巍,吴亮.CTCS2级列车运行控制系统超速防护仿真研究[J].交通运输工程与信息学报,2007,5(4):122-126.
[16]Booth PD.Intermittent and continuous automatic train protection[C]∥IET Professional Development Course on Railway Signaling and Control Systems,Birmingham,UK,2010:86-113.