基于蓝牙的车轮力传感器数据传输系统设计
2013-11-19刘庆华晏华文林国余
刘庆华,晏华文,林国余,王 东
(1.江苏科技大学 计算机科学与工程学院,江苏 镇江 212003)(2.东南大学 仪器科学与工程系,江苏 南京 210096)
汽车工业是我国国民经济的支柱产业,2011年我国实现汽车产销1 841.89万辆和1 850.51万辆,居世界首位.我国汽车行业的“十二五”规划将提高自主品牌汽车的国内市场份额列为重要的发展目标.汽车在行驶过程中受着6个维度的力和力矩(侧向力、垂直力、纵向力、扭转力矩、侧倾力矩、横摆力矩)的作用.准确采集这些力与汽车整车及各子系统的性能密切相关,如汽车制动系统的研究,评估汽车整车的动态性能,进行道路谱数据采集进而实现路谱再现,进行整车系统道路模拟测试系统,汽车悬架系统动态测量等.因此建立汽车道路采集系统对汽车开发、设计和性能评价有着重要的影响[1-3].在汽车行驶过程中随着轮胎高速旋转,固定在轮胎上采集模块和传感体也随着轮胎高速转动,如何将车轮高速旋转的受力数据传送到相对车体静止的传输模块上是车轮力传感器传输过程中需要解决的一个关键问题.过去的研究采用光电耦合和电容耦合等方式,电容耦合最快速率可达15 kHz,光电耦合最快可达100 kHz.而电容耦合精度不稳定,光电耦合采用光的方式传播信息,受安装和振动等影响较大,抗干扰能力弱.后续研究采用了射频无线传输(nRF2401)方式,可将传输速率提高到MHz级,但抗干扰以实现可靠传输仍然是一个难以解决的难题.为此,文中采用蓝牙无线技术,通过实验对比可知文中设计比nRF2401表现出更出色的速度和稳定性.蓝牙是一种支持设备短距离通信(一般10 m内)的无线电技术.蓝牙采用分散式网络结构以及快跳频和短包技术,支持点对点及点对多点通信,工作在全球通用的2.4 GHz ISM(即工业、科学、医学)频段.其数据速率为1 Mbps,传输速率方面完全满足本设计的要求[4-10].
1 系统总体设计
系统由传感体、采集模块和传输模块组成,并通过CAN总线将数据传送到上位机.系统总体设计如图1.
文中采集模块到传输模块的无线数据传输采用蓝牙设计,和RF模块(nRF2401模块)对比测试.蓝牙模块的核心HC-06采用CSR BC04蓝牙芯片技术,外带8Mbit Flash.标准HCI接口(UART和USB),配上CSR固件,可以实现透明的串口通信.采集模块和传输模块的控制芯片采用美国Silicon Laboratories公司的C8051F系列的SOC,高速的8051核,配有丰富的数字和模拟外设,功能强大.
采集模块将传感器的应变电压信号通过调理模块调制至0~2.4 V提供给C8051F021的A/D转换,采集模块通过编程选择使用nRF2401模块或蓝牙模块进行无线传输.传输模块实时接收采集模块发送来的数据,其控制芯片采用C8051F040,该芯片内含标准的Bosch全功能CAN模块,完全符合CAN协议2.0B.传输模块主要负责将来自上位机的命令按通信协议发给采集模块,并将采集模块的六维力数据按通信协议通过CAN BUS发给上位机.
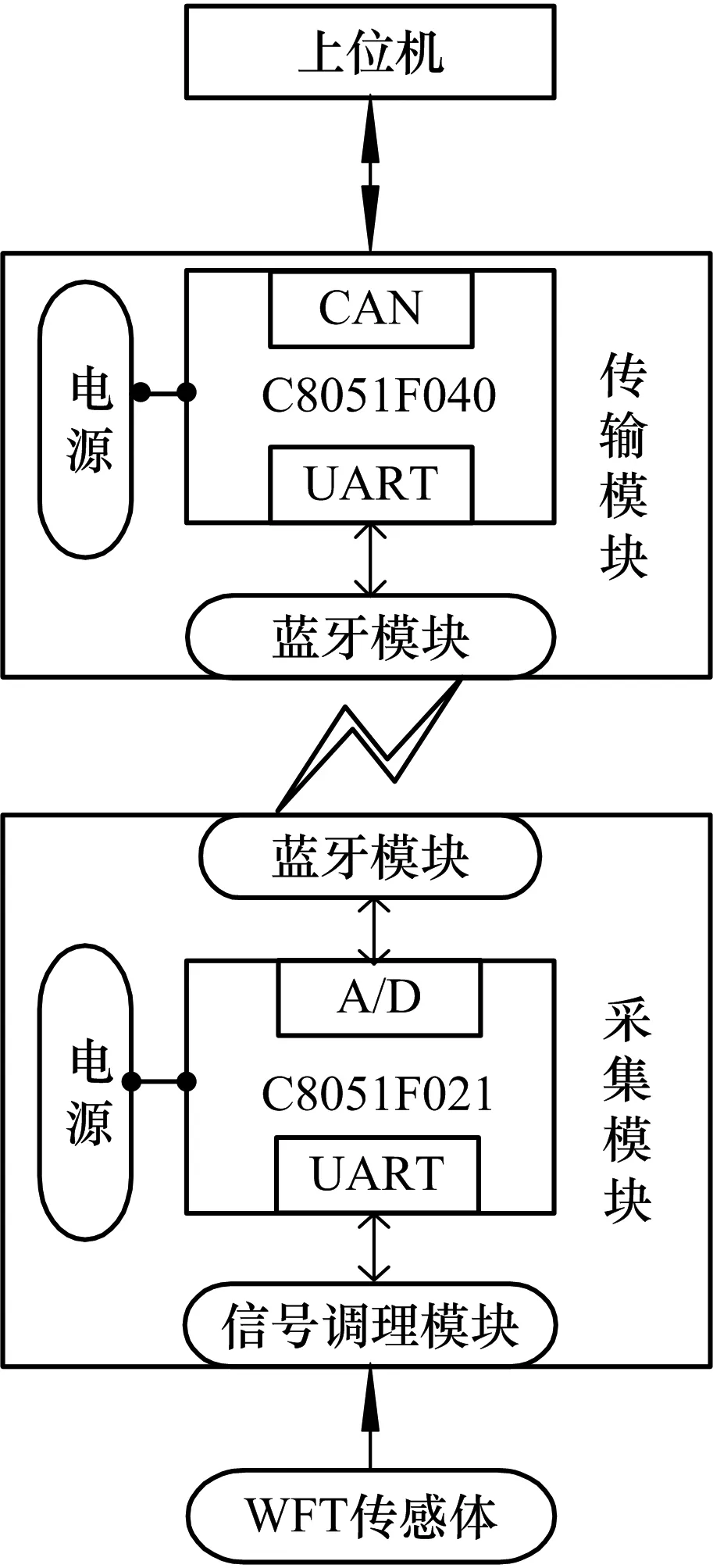
图1 系统框图Fig.1 Block diagram of the system
2 硬件系统设计
2.1 采集模块硬件设计
图2为采集模块硬件设计框图.
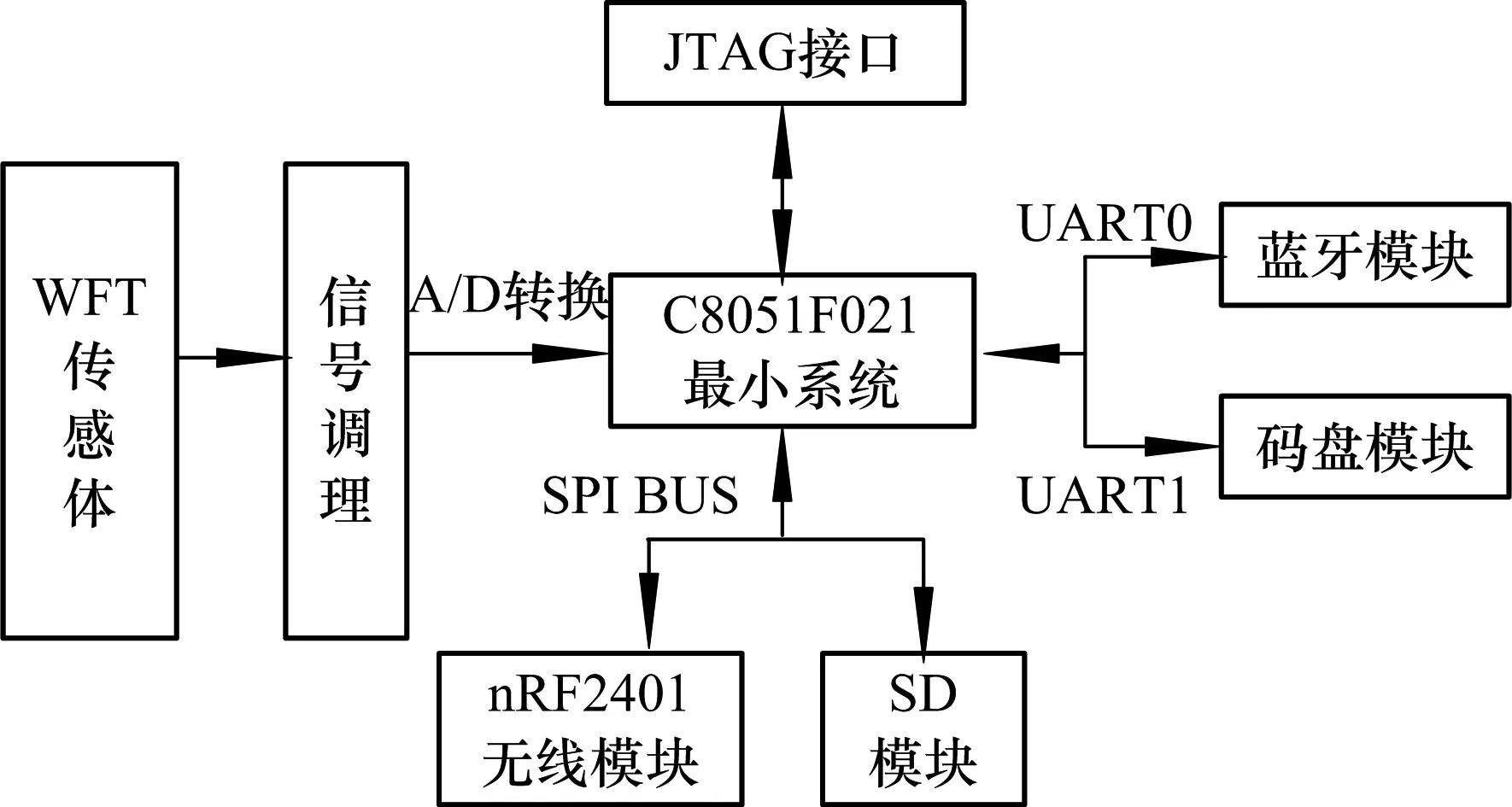
图2 采集模块硬件框图Fig.2 Hardware block diagram of the acquisition module
图2中C8051F021带有JTAG接口能快速的进行在线编程,传感体得到的电压信号由信号调理模块进行调理,使之置于C8051F21的A/D转换范围,然后和码盘模块的角度数据按协议组成一个包,经串口送往蓝牙模块,或经SPI总线送往nRF2401模块发往传输模块,也可以直接存储到本地SD模块,具体根据实际情况自由选择.信号调理如图3,传感体应变片即4个R组成的电桥,测得的信号常常十分微弱,差分电压信号经过电容滤波接入AD620正负输入端,2个47 K固定电阻和1个200 K精密可调电阻组成校准电路,微调校准输入电压.通过调节Rg可以设置AD620的增益,增益公式如下:
调节Rg可以使增益G范围为1~10 000.AD620输出的在单片机A/D转换范围之内的电压经过RC滤波后接入单片机.车轮力传感器的六维力(侧向力Fy,垂直力Fz,纵向力Fx,回正力矩Mz,侧倾力矩Mx,扭矩My)都通过类似的信号调理电路调节,输出电压经通道1~6(图3中CH1~CH6)接入C8051F021的A/D转换器的6路输入端.
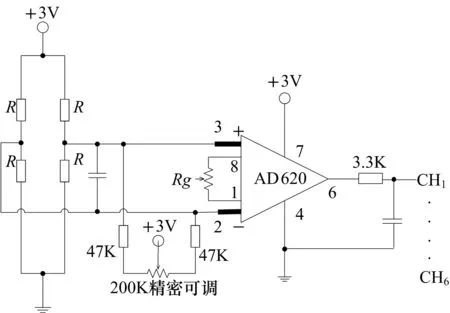
图3 信号调理电路Fig.3 Signal conditioning circuit diagram
2.2 传输模块硬件设计
传输模块硬件设计如图4,JTAG接口、蓝牙模块、nRF2401模块与采集模块配对,采用CAN总线方式与上位机通讯.CAN总线是汽车系统中应用理想的总线接口方式之一,具有可靠性、实时性和灵活性等特性,最大通讯距离可达10 km,最大通讯波特率可达1 Mbps.C8051F040内只集成有CAN控制器,收发器并没有纳入,文中采用CTM1050T,该芯片内集成了所有必需的CAN收、发器件.负责将CAN控制器的逻辑电平转换为CAN总线的差分电平且具有DC2500V的隔离功能及ESD保护作用.
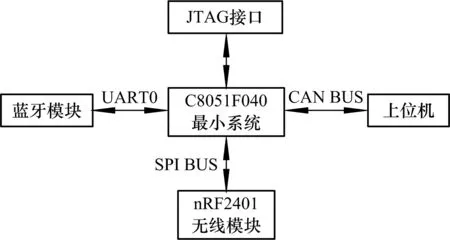
图4 传输模块硬件框图Fig.4 Hardware block diagram of the transmission module
2.3 蓝牙电路设计
蓝牙模块电路如图5,可以接5 V或3.3 V电压,主、从模块硬件电路一样,不同的是核心板固件,主模块可以发起配对,从模块只能接受配对.在配对过程中和AT命令下,主、从模块的LED灯都处于不断闪烁的状态.主、从模块密码一致配对完成后则不再闪烁,保持常亮状态.主模块断电后能记住上一次配对过的从模块,所以下一次配对时能自动连接上一次配对过的从模块.按下S1键可以清除主模块的记忆,从而与其他的从模块重新配对.使用R1114DC/DC变压器,能将5 V电压转换为3.3 V,方便与单片机直接相连.HC-06芯片是核心,带有8M Flash,配置有蓝牙转串口固件,通过TX,RX接口可直接与单片机串口相连,把蓝牙直接当串口使用,方便快捷,支持AT命令,可工作在串口的各个波特率下,文中采用115 200 bps.
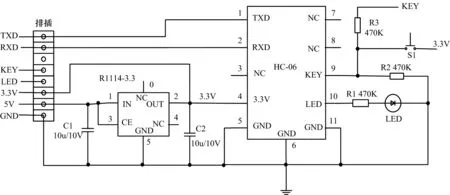
图5 蓝牙模块框图Fig.5 Hardware block diagram of the bluetooth module
3 系统软件设计
3.1 采集模块软件设计
采集模块软件设计流程如图6,系统和各个模块初始化后进行电量检测.采用电池供电时,采集模块与传感体都是密封在轮胎上随轮胎一起高速旋转,电池如果电量不足,则蜂鸣器报警,及时更换电池.无线传输使用蓝牙还是nRF2401可由实际情况确定.此外,采用SD卡进行本地存储方案也考虑在内,供使用者根据具体情况选择使用.文中主要采用蓝牙实现实时无线传输.当采集模块收到01号命令则激活模块,包括唤醒最小系统,给各个模块供电,使各模块进入工作状态;若收到02号命令则模块休眠,进入休眠状态,以节约用电;若收到03号命令则开始采集,每隔5 ms采集一次,在5 ms内采集模块要完成A/D转换按协议打包,通过无线发送出去;若收到04号命令则停止采集.
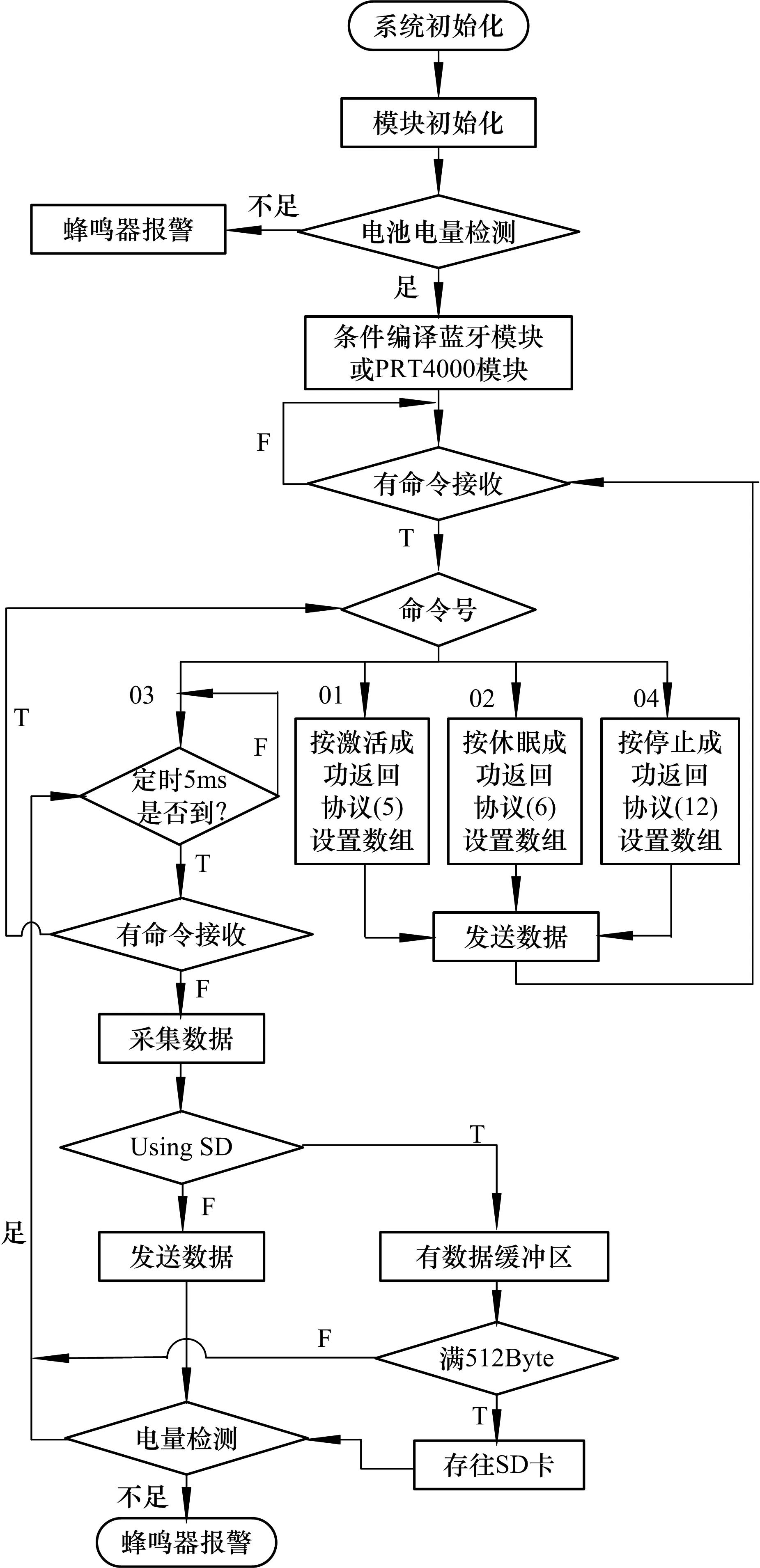
图6 采集模块软件流程Fig.6 Software flow diagram of the acquisition module
3.2 传输模块软件设计
传输模块软件设计流程如图7,上位机通过CAN发送命令给传输模块,这些命令包括激活、休眠、开始采集和停止采集.传输模块负责将这些按CAN格式的命令转化成规定协议的命令格式发往采集模块,并将采集模块的命令返回或数据返回通过CANBUS送往上位机,然后在上位机上完成后续的解耦去噪处理.程序在完成初始化后就处于等待上位机的命令状态,当收到命令后就将其按协议处理并通过蓝牙或nRF2401发往采集模块,然后等待来自采集模块的数据或命令返回,若收到命令返回则将其解析然后发给上位机,然后进入等待上位机的下一个命令;若收到数据则将这些数据打包按协议发送给上位机,如果上位机没有下一步命令(03号采集命令此时可以忽略),则继续接收下位机的数据,并按协议发往上位机,直到上位机有非03号命令,如此往复循环.
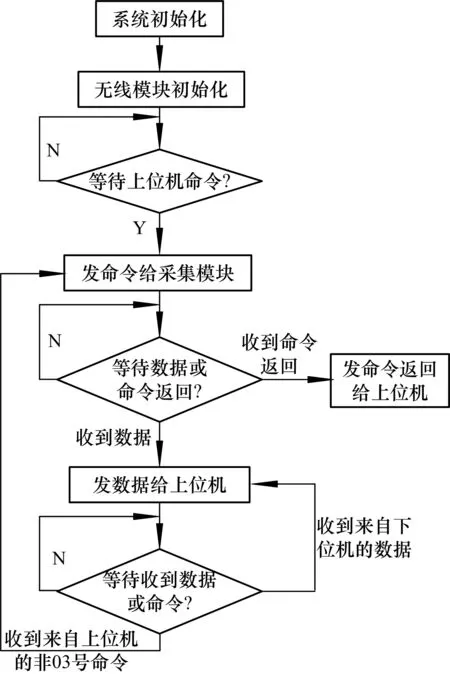
图7 传输模块软件流程Fig.7 Software flow diagram of the transmission module
4 蓝牙传输性能测试
搭建好采集系统的软硬件并调试成功后,对nRF2401无线模块和蓝牙无线模块分别进行测试,对比其优劣.测试性能指标包括速率和丢包率.由于汽车在不同路面环境下运行,所以该系统的工作条件相对恶劣,其测试阶段的实验条件包括隔金属、非金属障碍物、有无其他相同频率段的设备干扰、接收发送设备相隔不同距离等.
两种无线模块传输测得的性能指标分别如表1,2.
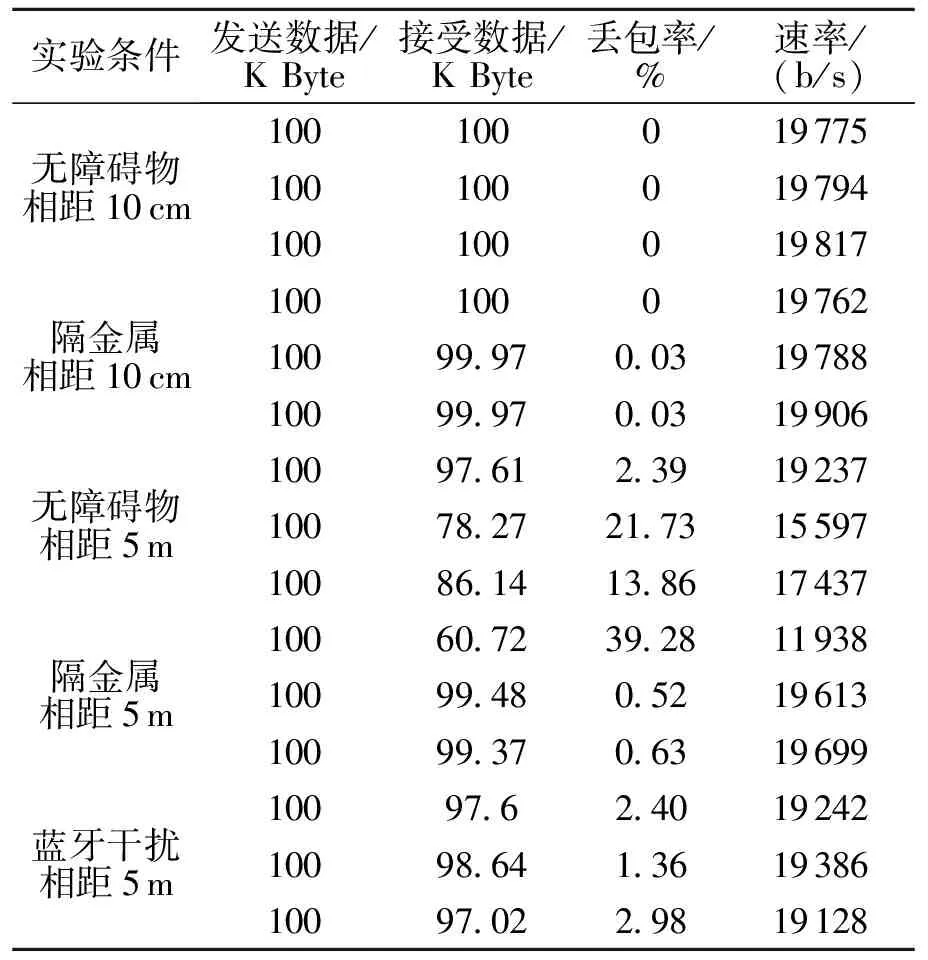
表1 nRF2401无线模块测试Table1 Test of nRF2401 wireless module
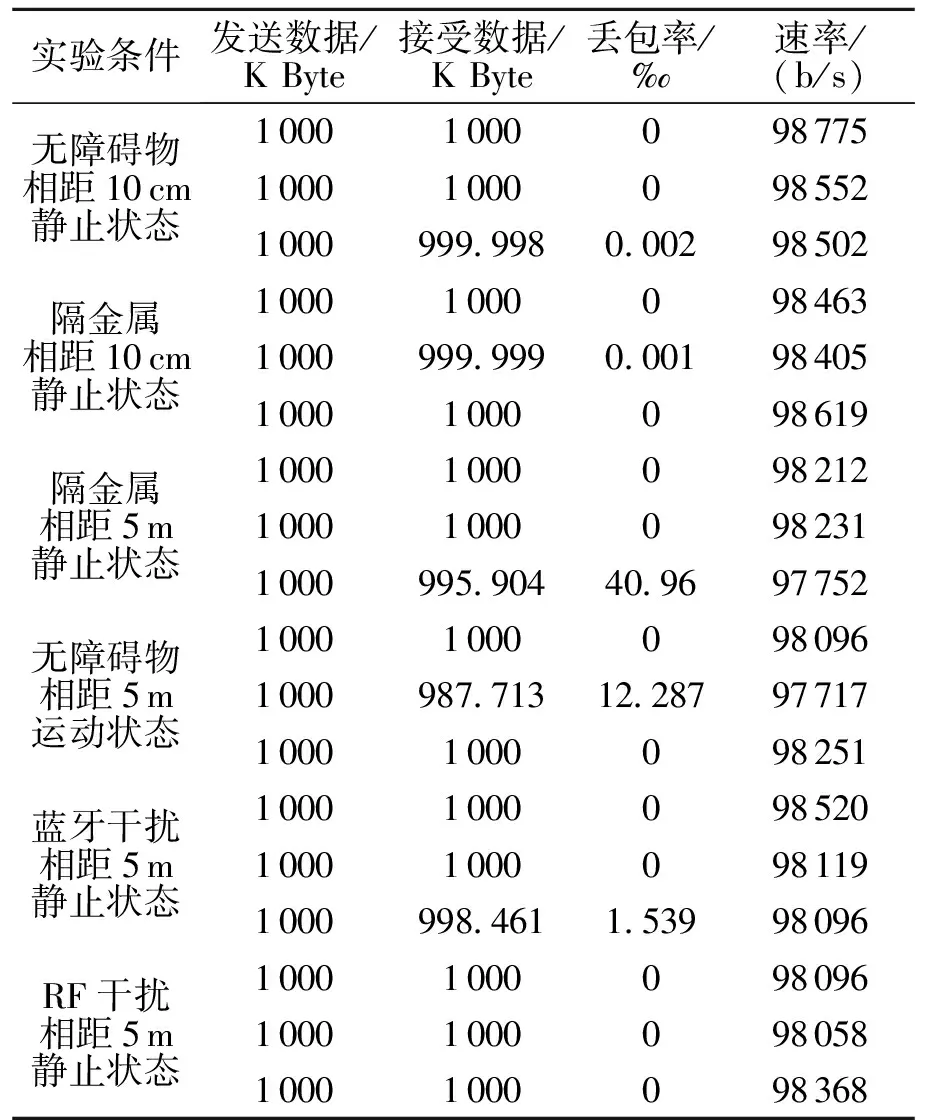
表2 蓝牙无线模块测试Table 2 Test of bluetooth wireless module
由表1可知,nRF2401在静止和近距离时其丢包率几乎为零,但随着实验干扰的增强(如附近有蓝牙在工作、使其处于旋转状态)或距离的加长(由原来的10 cm加长到5 m),其丢包率明显增大,最大可达40%.同等状况下(表2),蓝牙在不同实验条件下的性能表现稳定,丢包率的变化在允许范围内,且相较nRF2401明显优异,最大为4%.主要原因为nRF2401一次编程只能工作在一个固定频道上,而蓝牙能工作在79个频道上的任何一个频道,且随干扰情况的变化自由切换到其他干扰小的频道,即跳频工作方式.其抗干扰能力要强于nRF2401无线模块.传输速率的大小受制于两个无线模块的核心芯片的性能,nRF2401采用SPI总线接口与MCU相连,工作频率受主芯片工作频率和软件传输协议限制,使其理论上1 Mb/s的速率降到实际20 Kb/s,而蓝牙采用UART串口于MCU相连,可配置到11.5 Kb/s,通过实际测算由于收发切换的损耗降为9.8 Kb/s,虽然两个模块的速率都满足设备要求,但蓝牙传输能使得采集点更加紧密,从而使得车轮力数据的采集更加精确.
5 结论
基于车轮力的蓝牙无线采集系统的软、硬件设计已经设计完成,调试通过并进入实车测试.SD卡的本地存储由于SPI读写速度的限制,会造成数据的间隔性丢失,有待采用USB进行读写以弥补存储速度的缺陷.通过实验室的nRF2401无线模块和蓝牙无线模块对比测试可知,在稳定性和抗扰性方面蓝牙模块要优于nRF2401无线模块,由表1,2分析可知,蓝牙的传输速率是nRF2401的5.12倍,随着实验条件的复杂化和传输的距离变长,nRF2401的丢包率明显比蓝牙高很多,在干扰的情况下nRF401的丢包率平均为9%,而蓝牙的丢包率平均为1%.随着蓝牙协议4.0的到来,其功耗、速率、稳定性和安全性都为采集系统的升级提供了广阔的空间.
[1] 刘庆华,张为公.基于车轮力传感器的道路载荷谱采集系统设计[J].江苏大学学报:自然科版,2011,32(4):390-393.
Liu Qinghua,Zhang Weigong. Design of acquisition system for road loading spectra data based on wheel force transducer[J].JournalofJiangsuUniversity:NaturalScienceEdition,2011,32(4):390-393.(in Chinese)
[2] 付鹏,张为公,沈飞,等.车轮六维力智能传感器设计[J].轻型汽车技术,2005(7):18-20.
Fu Peng,Zhang Weigong,Shen Fei,et al.Design of wheel six-dimentional force smart transducer[J].LightVehicles,2005(7):18-20. (in Chinese)
[3] 菜英凤,张为公,周耀群. 基于CAN总线的汽车道理试验数据采集系统设计[J].测控技术,2008,27(4):50-52.55
Cai Yingfeng,ZhangWeigong. Design of data acquisition system of vehicle roadway test based on CAN[J].Measurement&ControlTechnology,2008,27(4):50-52,55. (in Chinese)
[4] 刘广孚,张为公. 车轮力传感器的侧向动态标定方法[J].仪器技术与传感器,2010(3):100-103.
Liu Guangfu,Zhang Weigong. Research on dynamic calibration method of lateral force of wheel force transducer[J].InstrumentTechniqueandSensor,2010(3):100-103. (in Chinese)
[5] 周耀群,张为公,刘广孚,等.基于新型车轮六分力传感器的汽车道路试验系统设计与研究[J].中国机械工程,2007,18(20):2510-2514.
Zhou Yaoqun,Zhang Weigong,Liu Guangfu,et al.Research and development on the vehicle roadway test system based on a new six-component wheel force transducer[J].ChinaMechanicalEngineering,2007,18(20):2510-2514. (in Chinese)
[6] Wang Yu,Zhang Weigong,Wang Hai. Application of wavelet method with nonlinear thrshold control in vehicle wheel force signal denoising[J].IntelligentConputationTechnologyandAutomation,2011,4:957-960.
[7] MTS System Corporation.Spinning wheel integrated force transducer[EB/OL].[2012-9-12].http:∥www.mts.com/en/products/producttype/testcomponents/wheel-force-transducers/index.htm.
[8] Kistler Instrument Corporation. Automotive measurement technology[EB/OL]. [2012-8-25] http://www.kistler.com/us-en-us/vehicles/Automtive-Measurement Technology.html.
[9] Watyotha C,Gee-Clough D,Salokhe V M.Effect of circumfer ential angle lug spacing and slip on lug wheel forces[J].Terramechanics,2001,38:1-14.
[10] Santosh P,Prathima A.A survey on localization techniques for wireless networks [J].ChineseInstituteofEngieers,2006,29(7):1125-1148.
