基于水下多波束的长江堤防护岸工程监测技术研究
2013-11-13邹双朝皮凌华甘孝清岳红艳
邹双朝,皮凌华,甘孝清,岳红艳
(1.长江科学院 a.工程安全与灾害防治研究所;b.水利部水工程安全与病害防治工程技术研究中心;c.国家大坝安全工程技术研究中心;d.河流研究所,武汉 430010;2.湖北省汉江河道管理局,湖北潜江 433100)
1 研究背景
建国以来,党和政府对长江崩岸治理十分重视,实施了规模宏大的护岸工程。据不完全统计,长江中下游护岸工程抛石总量达8 959.7万m3,建成丁坝700余条,柴排408.9万m2,混凝土铰链排117.1万m2,护岸总长度达1 325km,占崩岸总长的85%以上[1]。护岸工程的实施会使工程范围内的横向河床变形受到抑制,有利于长江堤防的稳定。但近岸未护处仍存在纵向与垂向冲刷,引起深泓刷深并内移,进而对护岸工程产生破坏性影响,严重时甚至会发生大面积崩岸,使得护岸工程失效,失去稳定河岸的作用。近年来,长江堤防护岸工程受损或崩岸的现象时有发生。为了预防护岸工程损坏或崩岸的发生,应对护岸工程进行定期监测与分析,必要时采取工程措施消除安全隐患。护岸工程监测主要包括护岸工程的位移监测、渗透压力监测、水下地形量测、地貌调查以及河岸、河床部位的侵蚀状况等[2]。护岸工程的岸脚、坡脚被淘刷是护岸工程失稳的最重要原因之一,因此,开展水下地形测量,准确获取护岸工程部位的岸坡河势变化信息,了解河床以及近岸受水流冲刷情况、河床局部冲淤变化、深泓线的变化、岸堤线的变化等,是堤防护岸工程监测最直观、最有效的方法。
目前在长江堤防护岸工程水下地形测量中采用较多的是单波束声纳测量技术。该方法按照一定距离间隔(100,50,30m)布设测线,获取各个不同监测断面的地形。单波束声纳测量技术采用逐点测量方法,将测得的断面数据绘制成图,采取直线插补法生成等值线,不能完全反映地形真实变化。另外,单波束声纳测量技术在水下地形量测中仅采用差分GPS技术进行瞬间平面定位,而对于监测船身的摇晃引起的测深误差没有采取补偿措施,使得测得的水深不是测点垂直方向的真实水深。单波束声纳测量技术不能够克服风浪的影响,测量误差大,且不能实现空间上的连续测量,难以满足护岸工程监测的需要。水下多波束测深系统是由声学仪器、GPS、姿态数字传感器、计算机及功能强大的软件组成的高新水下地形测量新技术。它采用广角度发射和多通道信息接收,获得堤防护岸上百个波束的条幅式地势数据,以带状方式对堤防进行监测,对堤防护岸工程的水下地形进行全覆盖测量。水下多波束测深系统采用姿态数字传感器对监测船的船身姿态进行改正,保证了竖直方向水深测量的精度。水下多波束的波束角很窄,可以精确反映水下地形的细微变化、水下目标物的大小和形状,能够全面、准确地反映堤防护岸的地形起伏变化。水下多波束测深技术大大提高了堤防护岸工程监测的精度、分辨率和工作效率[3]。
本文以长江中游湖北省监利县铺子湾已建护岸工程河段为例,研究基于水下多波束的堤防护岸工程监测技术,丰富和完善了现有的护岸工程的监测技术,为长江中游河道护岸工程监控与治理提供技术支撑,具有十分重要的现实意义。
2 水下多波束测深技术
2.1 系统组成
水下多波束测深系统一般分为多波束声学系统、多波束数据采集系统、数据处理系统和外围辅助传感器。其中多波束的声学系统主要实现波束的发射和接收,主要设备为换能器;多波束数据采集系统将接收到的声波信号转换为数字信号,并反算测量距离或记录其往返程时间;外围辅助传感器主要包括定位传感器、姿态传感器、声速剖面仪和罗经,主要实现测量船瞬时位置、姿态、航向的测定,以及水中声速传播特性的测定;数据处理系统以工作站为代表,综合声速测量、定位、船姿、声速剖面和潮位等信息,计算波束脚印的坐标和深度。
本文研究中使用的水下多波束测深系统是丹麦Reson公司的Seabat7125型高精度水下测量仪器设备。它由7-P处理器、GPS定位设备、OCTANS光纤罗经和运动传感器、多波束数据后处理系统共同组成,各个功能模块连接见图1。Seabat7125水下多波束测深系统可以发射128°×1°的扇面波束,反射信号经换能器接收,通过波束形成器形成256个波束,每个接收窗口大小为27°×0.5°,每个波束的宽度是1°×0.5°,系统的接收扇面角为256°×0.5°,工作频率为400 kHz,测距量程为200m,测深分辨率为5mm[4]。

图1 SeaBat7125水下多波束测深系统组成图Fig.1 Composition of Seabat7125 underwater multi-beam sonar system
2.2 平面位置精度
水下多波束测深系统影响平面位置精度的因素主要有GPS定位精度、时延测量精度、纵横摇及艏摇测量精度、声速传播等。根据误差传播定律,平面位置的总误差为

mGPS为GPS的定位误差。采用GPSRTK技术进行平面定位时,平面定位精度为10mm+1×10-6m,电台一般有效作业距离为5km,那么mGPS最弱为0.015m。
mTime为时延测量误差。SeaBat7125系统采用PPS秒脉冲技术对7-P处理器、采集电脑、GPS接收机进行时间同步,系统时延为0.0 s,mTime为0.0m。
mRoll为横摇误差。横摇使波束产生侧向偏移,使得换能器绕x轴在yoz面内发生r角旋转,引起测量断面的变化(虚线断面为理想测量断面,实线为实测断面)。从图2上直接计算其最大误差为

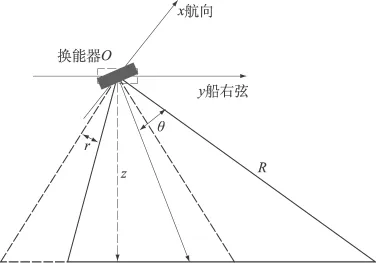
图2 横摇误差影响示意图Fig.2 The influence of roll error
mPitch为纵摇误差。纵摇使得换能器绕y轴在xoz面内发生p角旋转,引起测量断面的变化(虚线断面为理想测量断面,实线为实测断面),使得理想测量断面同实际测量断面产生二面角p。从图3上直接计算其最大误差为
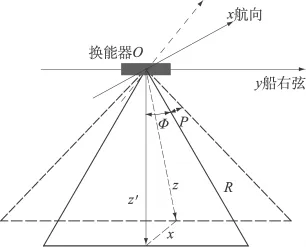
图3 纵摇误差影响示意图Fig.3 The influence of pitch error

mYaw为船艏误差。船艏误差对边缘波束的平面位置精度影响计算公式为

式中:m0测定精度一般控制在0.05°;θ为最大波束角;SeaBat7125取60°;H为换能器至水底水深,取30m。则 mRoll为0.104m,mPitch为0.026m,mYaw为0.045m。
声速误差mSound对位置的影响主要体现在声波在水中的非直线传播,对于浅水区,声速测量误差的影响是非常微小的,数值一般估算在0.002m[5]。
因此,在深度不超过30m的长江堤防护岸工程河段进行多波束测量时,由式(1)可得误差最大的平面位置精度为0.118 m。
2.3 水深测量精度
影响水深精度的因素主要有多波束本身的测深误差m1、潮汐改正误差m2、换能器静态吃水改正误差m3、船舶姿态补偿横摇改正误差m4、船舶姿态升沉的改正误差m5、声速剖面改正误差m6等。根据误差传播定律,则水深测量的总误差为

水下多波束测深系统的测深误差为0.01m,潮汐改正误差可控制在0.05m;换能器吃水改正误差(含动吃水)可控制在0.05m;船舶姿态补偿横摇改正误差为0.05°,则0.05°引起的边缘处的最大深度误差为mz=H×tanθ=0.026m。船舶姿态升沉的改正误差为0.05m。声速测量误差对深度的影响:若水深为30m,则声音到达水底所用时间为30m÷(1 500m/s)=0.016 s;若声速测量误差为0.06m/s,则引起的深度误差小于0.001m。
因此,在深度不超过30m的长江堤防护岸工程河段进行多波束测量时,由式(5)计算可得水深测量最大误差m水深为0.094 6m。
3 护岸工程监测方法
根据长江堤防护岸工程的特点和相应的监测规范,采用水下多波束测深技术进行护岸工程监测的作业方法如下:
(1)多波束系统SeaBat7125探头支架的安装需要保证和船体成为一个整体,船体姿态测量能够很好反映探头的发射和接收位置。
(2)设置船体坐标系中心参考点CRP中心,船右舷方向为x轴正方向,船头方向为y轴正方向,垂直向上为z轴正方向。分别量取GPS天线、罗经、声纳探头相对于参考点的位置。
(3)在已知控制点架设基准站,检查RTK的流动站选项与流动站无线电设置,待有RTK固定解时,设置定位数据(GGA)、时间数据(ZDA)、同步时间触发信号(PPS)、端口、波特率等参数。
(4)在监测船上依次安放7-P主机、采集工控机、显示器等,然后通过采集软件PDS2000,将GPS流动站的输出时间信号(PPS,ZDA)、导航定位数据(GGA)、OCTANS光纤罗经定向数据和运动传感器姿态数据、7-P水下地形数据与采集电脑联接,各个设备数据工作正常,按照预先布置的测线进行堤防护岸工程变化过程水下三维地形监测。
(5)护岸工程水下三维地形扫测完成后,选择特殊的地形,采集多波束水下地形数据,并计算探头安置的校正值。
(6)多波束测深系统换能器的高程确定一般采用RTK法。流动站GPS天线垂直测量精度约为2cm,考虑到天线高与水下多波束测深系统的换能器高程测量误差、波浪,垂直方向的精度在4cm左右。
(7)声速剖面测量。与单波束不同,多波束测量依赖于水体介质对声波的传播、反射、散射,测量各波束的不同到达角,将接收到的数据按角度、旅行时经过的声速剖面折算成深度和侧向水平距离。因此,计算时需要掌握测区的声速变化特征与规律,通过声速剖面软件编辑,并在数据处理时进行声线弯曲改正。
(8)多波束内业数据处理采用CARISHIPSand SIPS软件的HIPS模块,对各传感器采集数据进行处理,并设定水深数据过滤参数,删除大部分的假信号,保留高精度的水深数据,生成水底立体三维地形图。将全覆盖的三维数据按照指定的网格抽稀输出并采用CASS 9.0绘图软件编制护岸工程水下地形平面图。
为了监测湖北省监利县铺子湾护岸工程的水下地形变化,分别于2010年4月和2011年4月,采用SeaBat7125水下多波束测深系统进行水下三维地形监测,选择水文作业船作为测量船,利用监利县水文站的河势断面测点作为基准站,水面高程采用GPS正常高程测量,现场监测情况见图4。

图4 监利县铺子湾护岸工程监测现场Fig.4 The monitoring site of Puziwan revetment work in Jianli county
4 监测成果分析
本文采用监测导线法、横断面分析法、冲刷坑面积分析法等对护岸工程的水下地形量测成果进行分析。监测导线法可分析近岸河床变化,直接反映监测河段沿线河床的变化情况和近岸河床冲淤变化的沿程分布关系,具有总体量化分析的特点。横断面分析法和冲刷坑面积变化可直接反映出局部岸段近岸河床冲淤变化的横向分布关系[6]。上述方法各有优缺点,将3种方法结合起来,实现护岸工程的监测的总体量化分析和局部图形分析的优势互补。
综合考虑铺子湾护岸工程的实际情况,在监测区域内选取3条监测导线和5个监测断面分析(见图5),并对比2次多波束测量成果,分析护岸工程的水下地形变化。
4.1 监测导线分析
图6是护岸工程的岸脚高程分别为5,10,15m时3条导线上的高程变化分布图。由监测结果可以看出,矶头以上,5m高程处的已护工程的坡脚高程不变,10m和15m岸线工程的坡脚变小。矶头以下部分,5m护岸工程的坡脚发生了部分冲刷,使得高程变低;10m和15m处,2次已护工程地形变化不大,基本保持稳定。
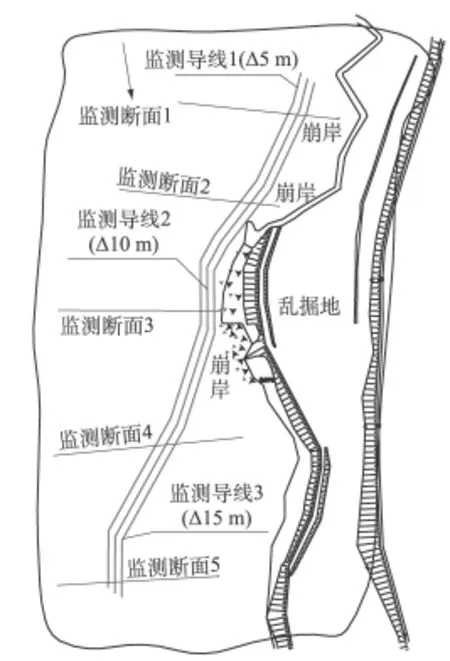
图5 铺子湾河段监测导线和横断面布置图Fig.5 The monitoring lines and their cross sections on Puziwan river segment
4.2 横断面分析
图7是护岸工程的5个横向监测断面的高程变化分布图。从图中5个横断面的高程变化过程来看,2010年至2011年,靠近堤防岸线位置发生了较大的坍塌,2011年铺子湾护岸加固工程,在坍塌的基础上进行抛石护岸加固,使得铺子湾左岸的河床抬高4m左右。在矶头保护下,上游1#断面和2#断面的深槽向右偏移,这样加剧了3#断面、4#断面和5#断面的右河床的变化,使得河床变深。
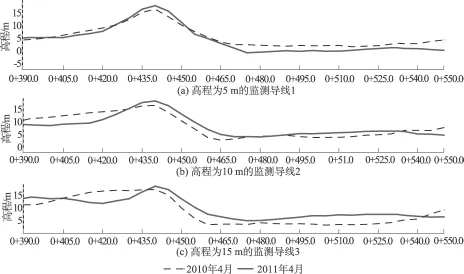
图6 监测导线高程变化过程分布图Fig.6 Variation of the elevation of monitoring lines
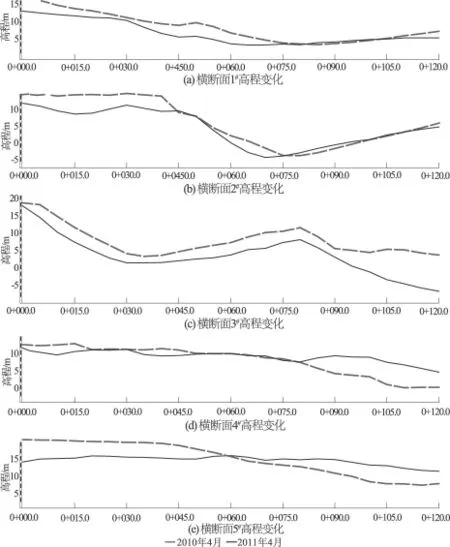
图7 1#—5#横断面高程变化分布图Fig.7 Variation of the elevation of cross sections 1#—5#
4.3 冲刷坑面积分析
图8和图9分别是矶头上游和下游高程-3 m冲刷坑的变化图。从图8和图9可看出,经过近1 a的冲刷,矶头上游的冲刷坑,深槽向右岸偏移,增加了河床的冲刷面积;矶头下游的冲刷坑,由于主流的变化,使得下游的深坑向下游发展,冲坑面积有所扩大。
4.4 护岸工程稳定性分析
引起护岸工程崩塌的直接原因是组成河岸的土体失稳所致,土体的稳定性取决于土体的稳定坡度和实际坡度之间的对比关系。当实际坡度缓于稳定坡度的时候,河岸是稳定的;反之,则是不稳定的。土体的稳定坡度主要取决于土壤的物理特性,此外还与水流、气候、植被、人类活动等外部因素有关。当土体组成发生液化,必然改变土体的稳定坡度,此时即使河岸实际坡度未变陡或变化很小,一旦当前稳定坡度的变化超越了河岸实际坡度的临界值,就会发生崩塌。一般情况下,黏土、亚黏土与细沙土夹层河岸的稳定坡比均缓于1∶3。对铺子湾选取的1#—5#横断面的护岸工程坡度比进行统计,结果见表1。
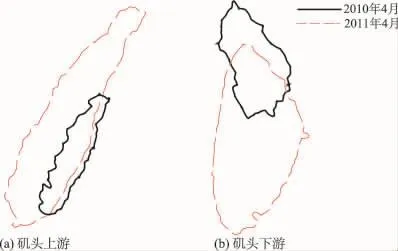
图8 矶头上游和下游高程-3 m的冲刷坑的变化图Fig.8 Change of the scour pit at elevation-3m in the upstream and downstream of rock spur
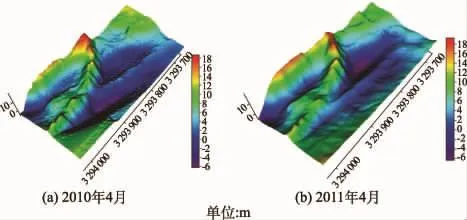
图9 矶头处2010年与2011年的三维变化图Fig.9 Comparison of 3-D images of the rock spur in 2010and 2011

表1 铺子湾1#—5#横断面的坡度比统计表Table 1 Slope ratios of cross section 1#—5#of Puziwan river segment
从铺子湾的岸坡比来看,已护工程已取到稳定河岸的作用。在岸坡比较陡的区域,监测导线表明2010年至2011年,岸坡冲淤平衡或者淤积,护岸工程起到稳固河岸的作用。坡比小于1∶3较缓的区域,由于护岸工程的作用及相应区域的土质抗冲性差,岸坡小部分冲刷,但不影响河岸的稳定。
5 结论与建议
本文结合水下多波束测深技术全覆盖、高精度、高效率等特点,开展了基于水下多波束的长江堤防护岸工程监测技术研究,并将其应用于监利县铺子湾长江堤防护岸工程中。连续2 a相同时段进行了2次全覆盖扫测,根据2次扫测结果,采用3种不同的分析方法对堤防护岸的变化过程进行分析,取得如下成果与结论。
(1)水下多波束测深系统在30m水深情况下的平面和深度测量精度可以满足护岸工程监测的要求。
(2)分别采用监测导线分析法、横断面分析法、冲刷坑面积分析法对护岸工程的监测成果进行分析,结果表明护岸工程实施后深槽向右岸偏移,减弱了堤防冲刷强度。
(3)统计护岸工程的典型横断面的最大坡比、平均坡比,并与监测导线分析的成果进行比较,岸坡冲淤平衡,护岸工程稳定。
(4)基于水下多波束的长江堤防护岸工程监测技术,丰富和完善了现有堤防护岸工程变化过程的监测方法,具有一定的市场应用前景。
[1]长江水利委员会.长江中下游护岸工程40年[C]∥长江中下游护岸工程论文集(4).武汉:水利部长江水利委员会,1990:15.(Changjiang Water Resources Commission.Forty Years of Bank Protection in the Middle and Lower Yangtze River[C]∥Proceedings of Bank Protection in the Middle and Lower Yangtze River(volume 4).Wuhan:Changjiang Water Resources Commission,1990:15.(in Chinese))
[2]赵建虎.多波束深度及图像数据处理方法研究[D].武汉:武汉大学,2002.(ZHAO Jian-hu.Data and Image Processing of Depth of Multi-beam Echo Sounder[D].Wuhan:Wuhan University,2002.(in Chinese))
[3]RESON Inc.SeaBat 7125 Operator’s Manual[K].Goleta,California,US:RESON Inc.,2007.
[4]刘胜旋,关永贤.多波束系统的参数误差判断及校正[J].海洋测绘,2002,22(1):33-37.(LIU Sheng-xuan,GUAN Yong-xian.Correction of Parameter Error on Multi-beam Echo Sounding System[J].Hydrographic Surveying and Charting,2002,22(1):33-37.(in Chinese))
[5]余文畴,卢金友.长江河道崩岸与护岸[M].北京:中国水利水电出版社,2008.(YU Wen-chou,LU Jin-you.Bank Collapse and Protection of Yangtze River[M].Beijing:China Water Power Press,2008.(in Chinese))
[6]岳红艳.长江河道崩岸机理的初步探讨[D].武汉:长江科学院,2001.(YUE Hong-yan.Preliminary Study on Mechanism of Bank Collapse of Yangtze River[D].Wuhan:Yangtze River Scientific Research Institute,2001.(in Chinese))