太阳能电池板跟踪控制系统改进研究
2013-11-12罗清
罗 清
(武汉外语外事职业学院, 湖北 武汉 430083)
聚光太阳能电池板是一种新型电池板,它比普通电池板效率高,能够将太阳能聚焦1 400倍于太阳能电池上[1],单位面积上获得的太阳能更多,从而很大程度上节约了单晶硅电池的使用量.在4倍光强下,电池的输出量是平均电池输出量的3.3倍左右.如果能够保持电池板与太阳光线始终垂直,还能够在原有的基础上提高35%左右.因此,如果能设计出这样一个跟踪系统,保持电池板与太阳光线垂直,则可以极大提高电池板的发电效率.
现有的太阳能电池板跟踪控制方法有匀速定时控制法、光强比较法、光敏电阻光强比较法.匀速定时控制法实现比较简单,其原理主要是基于太阳一天的运动轨迹,因为不同季节的日出日落时间不同,系统的精度不能保证,累积误差很大.光强比较法是通过两块成V字形的光电池板来比较光强确定是否垂直,其优点是调节较为精确,电路也比较简单,但两个电池板之间的夹角始终存在,永远无法达到真正意义上的垂直.光敏电阻光强比较法虽然可以避开前两种控制方法的缺点,但是系统对于电阻的灵敏度要求很高,特别是在光照特别强或弱的条件下,一般的光敏电阻无法准确获得相应的跟踪信号.另外,电阻的灵敏度越高,成本越高,后期信号处理越复杂,跟踪系统的实时性越差.
本文针对匀速定时控制法中存在的一些问题,提出一种改进的跟踪控制方法,在保证准确度的前提下实现了定时启动、掉电记忆储存、手动与自动切换等特定功能.在此基础上,选择欧姆龙PLC为控制器,完成了整个跟踪控制系统设计.
1 跟踪原理
即使对于固定的地点,太阳光线在一年四季不同时间内的入射角也是不同的,通过查询太阳能电站安装地区的经纬度可以得到太阳一年中不同时段日照中天的时间,从而计算出太阳直射太阳能电池板起始、终点位置的时间.太阳能电池板跟踪系统采用双轴跟踪,分别对高度角和方位角进行跟踪.由于太阳和地球的周期运动,根据某地点的正午最大高度角和太阳移动的速度可推算出每天跟踪系统的启动时间.
太阳的东升西落是地球自转与公转共同作用的结果.利用天体运动学原理,计算出太阳的理论位置[2]:
高度角α:太阳光线与地平面的夹角.
sinα=sinφsinδ+cosφcosδcosω.
(1)
方位角γ:太阳光线在地平面的投影与南北方向线之间的夹角.
sinγ=cosδsinω/cosα.
(2)
式(1)、(2)中:φ为当地纬度角;δ为赤纬角;ω为时角.
纬度角φ:纬度是指某点与地球球心的连线和地球赤道面所成的线面角,由地理位置唯一确定.
赤纬角δ:太阳光线与地球赤道面的夹角,仅与日期有关,第n天的赤纬可表示为[2]:

(3)
时角ω:可近似通过时间来获得,其误差可忽略.
ω=15(12-t).
(4)
由式(1)、(2)可知太阳高度角α及方位角γ可由当地纬度角φ、赤纬角δ、时角ω唯一确定,在纬度一定的情况下可以通过时角与方位角确定高度角与方位角.
如图1所示,将太阳能板的旋转轴(极轴)调整至与地轴平行,其安装角即为当地纬度角φ,此时可以通过极轴旋转抵消地球的自转.同时为保证太阳能电池板能与太阳光垂直,使电池板与极轴夹角为太阳赤纬角δ.通过计算可以证明,极轴式跟踪一天太阳能板的俯仰角变化不大于0.4°,如果半个月调节一次,光强减弱程度不足0.5%,故俯仰角可以周期性机械调节,将二维运动转化为一维,减少一台电机,简化了系统的机械结构,降低了系统的制作与运行成本.

图 1 极轴式跟踪示意图
2 系统设计
2.1 设计要求
1)跟踪速度:5°/20min;返回速度:10°/20min.
2)该系统具备手动与自动调节切换功能,可以让太阳能电池板在手动或者自动状态下向左右旋转.
3)起点、终点位置安装有限位行程开关,用来保护太阳能电池板旋转不超过机架限位位置.
4)PLC控制系统具有掉电记忆储存功能,实时记录旋转跟踪位置;在一天内掉电而恢复来电时,根据掉电时的跟踪位置记录,自动跟踪到实际位置.
5)控制系统要求具有电源指示灯、旋转方向指示灯、故障急停按钮.
6)太阳能电池板晚上12∶00时自动返回至起始位置.
2.2 硬件设计
跟踪系统由控制器(欧姆龙CP1L)、驱动器、步进电机、跟踪机构、太阳能电池板组成.通过PLC控制步进电机驱动器来驱动步进电机的旋转,实现对太阳轨迹的跟踪,最大限度地利用太阳能(图2).
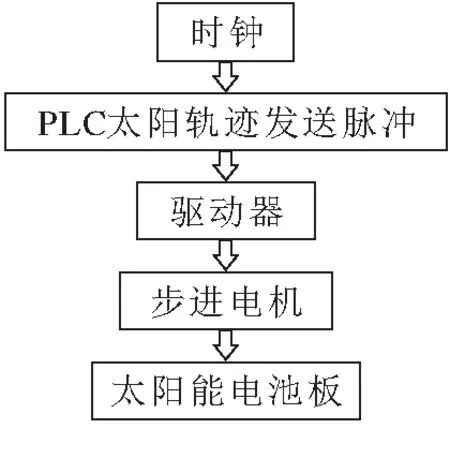
图 2 跟踪系统硬件组成结构图
2.2.1控制器采用欧姆龙CP1L—M60DR—A型号的控制器,由于太阳能跟踪系统属于小型控制系统,而CP1L系列就是针对小规模控制系统优化的PLC,从硬件上大大降低了控制系统的成本.
CP1L系统PLC具有以下特点:
1)最大160点I/O扩展能力;
2)最大程序容量10 K步,最大数据容量32 K字;
3)高速计数相位差方式50 kHz×2轴;单相100 kHz×4轴;
4)最大2个串行通讯接口(RS232/RS485任选).
2.2.2步进电机驱动器采用混合式步进电机驱动器,该类驱动器采用PWM方式驱动,具有工作电压范围宽、效率高,相电流、细分数可调,自动半流的特点,相电流设定从0.5~2 A,细分数设定有2、4、8、16、32、64共六档,可满足微步距驱动的要求.
2.2.3步进电机
步进电机是一种将电脉冲信号转化为角位移的执行机构,每接收一个脉冲电机就转过一定角度[3].根据它的结构一般可分为三种:永磁式(PM)、反应式(VR)和混合式(HB).混合式步进电机融合了永磁式和反应式的优点,目前在市场上使用最为广泛.步进电机没有角累计误差,故作为执行机构可保证较高的精度,可以采用开环控制.
通过选择二相混合式步进电机,采用1/64的细分,改善了步进电机工作的旋转位移分辨率,减少振动,降低工作噪音.由于跟踪器要求有较高的保持转矩,对电机转速要求又不高,故在步进电机前增加减速器,增加电机保持转矩,提高了系统的平稳性.
2.3 软件设计
软件是系统的中枢,软件质量的优劣决定了系统整体应用的好坏.CX-Programmer 是OMRON公司新的编程软件,可以实现梯形图或语句表的编程、编译检查程序、程序和数据的上载及下载、设置PLC的设定区、对PLC的运行状态或内存数据进行监控和测试、打印程序清单、文档管理等功能.
程序中主要实现的功能:定时启动、定时复位、掉电记忆储存、手动与自动调节切换、急停.
定时启动、定时复位:采用欧姆龙编程中的时刻比较模块(DT),将每天要启动的时刻(包含年、月、日、时、分、秒)保存在内存中,与PLC内部的时钟进行比较,到达相应的时间即启动跟踪程序.
定时启动与定时复位采用的是查表法,根据气象台的数据得知一年中每天太阳处在最大高度角的时间,然后推出相应的日出、日落时间.将这些数据编写为十六进制,保存到PLC内存中,便于控制每天电机启动和复位的时间.如表1为部分日期的启动时间及编码设置.

表1 查表法内存设置
采用查表法,可以按照每天要求的时间定时启动和复位,避免了以往定时匀速控制法中的累积误差,实现原理简单,控制方便.
掉电记忆存储:通过公式(5),算出要求正常跟踪下PLC发送的脉冲频率.
ω=iθ/(N细分f).
(5)
式中:ω为电机转速(°/s);i为步进电机与电池板之间传动比;θ为步进电机步距角(°);N细分为步进电机驱动器细分数;f为正常跟踪下PLC发送脉冲频率.
然后,将f代入公式(6),获得跟踪到实际位置要求的脉冲数.
f(△T+N/f')=N.
(6)
式中:△T为掉电与来电的时间差(这里只对时、分、秒求差);N为跟踪到实际位置要求的脉冲数;f'为快速跟踪时PLC发送的脉冲数.
手动与自动切换:通过分别记录手动和自动调节发送的脉冲数来实现.
N=N手动+N自动.
(7)
式中:N手动是手动调节下PLC发送的脉冲数;N自动是自动调节下PLC发送的脉冲数.
为了满足设计的要求,控制系统中设计了6个输入信号:启动、停止、来电复位、自动追赶、手动调节、急停.

图 3 系统控制流程图
如图3所示为整个系统的控制流程图.当某天启动开关,等待核对时间,如1月1日7点56分启动,启动后如果突然断电,过3个小时来电,在计算要求发送脉冲的个数的同时,太阳能电池板进行复位.然后根据操作人员的要求选择自动档或手动档进行快速跟踪,也可以在两种档位之间进行切换,最终跟踪到实际位置,保持正常状态下的跟踪直至极限位置.晚上8点再次启动电机,让电池板复位到达初始位置.
3 结束语
本文主要针对太阳能电池板跟踪系统在一维上的调节,但是由于二维调节的类似性,该系统能够很好的扩展到二维的跟踪.与其他几种跟踪方式相比,该系统避免定时匀速调节的累积误差,光强、光敏比较法外围电路的复杂,更容易实现和维护,保证跟踪精度的同时,也提高了经济效益.
[参考文献]
[1] 赵李霞,舒志兵.基于松下PLC的太阳能跟踪系统设计[J].南京:机床与液压,2010,38(14):100-102.
[2] 饶 鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J] .控制工程,2004,11(06):542-545.
[3] 许守平,李 斌,马胜红.槽式太阳能热发电跟踪控制系统的研究[J].计算机测量与控制,2008(11):1 635-1 637.
