陶粒砌块分料机静力学分析
2013-11-06王淑花秦宝荣韩立光赵海宝
王淑花,秦宝荣,韩立光,赵海宝
(浙江工业大学特种装备制造和先进加工技术教育部重点实验室,浙江 杭州 310014)
在全球推进环境可持续发展的浪潮中,节能的重要性日益凸显[1]。陶粒增强加气砌块作为一种具有轻质、高强、隔热保温、防火、隔音、环保等特点的新型墙体自保温材料[2]在现代建筑业中备受欢迎。但是目前国内的陶粒增强加气砌块的生产自动化程度不高,生产效率低,砌块的生产水平难以满足建筑业的需求。因此高效率、全自动化、低能耗的陶粒砌块生产线的研究具有重大的意义。陶粒砌块生产工艺为模具成型-湿热养护-脱模切割-蒸汽养护[3]。笔者所在单位应企业要求研发陶粒砌块生产线,本文设计的砌块分料机为生产线中重要设备之一,主要是负责将一次切割好的砌块进行90°翻转,然后将翻转的砌块逐块输送到切割机上进行二次切割。
1 分料机的结构设计
分料机的整体结构如图1所示。
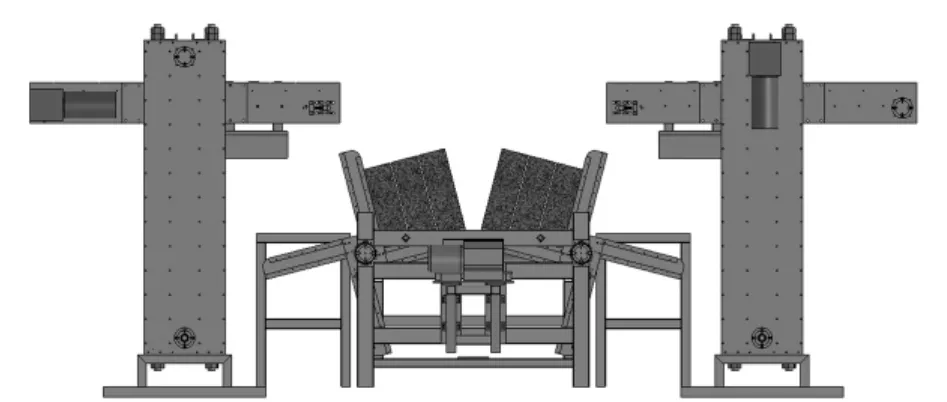
图1 分料机结构简图
砌块经一次切割后运输到分料机中间的辊子架上。机架电机通过齿轮箱和链条带动翻转架转动,陶粒砌块便3块为一组同时向左右翻转,当转动角度达到90°时,停止翻转。机械手将砌块夹紧后运输到二次切割机上,整个分料动作结束。
分析分料机的工作状况可知,分料机的翻转架、左右导板、机械手需要具有良好的静刚度。翻转架变形过大,会影响砌块两端起落的同步性。同步性差必定会导致砌块一端先与侧支架接触碰撞。由于砌块仅是养护24h便进行切割生产,它的内部结构硬化并不完全,在碰撞过程中砌块难免出现损伤。机械手若变形过大,会夹不紧砌块,在运输过程中易出现掉料现象。左右导向板发生变形,则会影响机械手水平运输的顺畅度。因此对分料机进行静力学计算,对其静刚度进行分析十分必要。
2 分料机有限元建模
在进行有限元分析时,为简化计算,进行如下假设:(1)分料机在工作过程中始终处于弹性阶段;(2)假定位移和变形都是微小的[4]。同时,分料机的几何结构中有倒角、卡槽、螺纹孔等结构,在建立有限元模型时,不可能全部考虑这些因素,由于局部细节对结构分析结果影响不大,但会增加有限元模型的复杂度和计算时间,因此在几何建模中,果断去除这些细节结构[5]。机械手中的气缸结构复杂,现将其简化为质量等效、结构简单的质量块。在龙门架的分析中,主要是看这个框架的变形情况,因此将龙门架的链轮、链条、轴承座等都简化掉。另外分料机安装的螺栓、小滚轮等对结构分析影响不大的小零件,在建模时也将去除。在本文中,将分料机分为机械手、翻转架、龙门架3个部分进行分析。
各部件网格划分模型如图2所示。
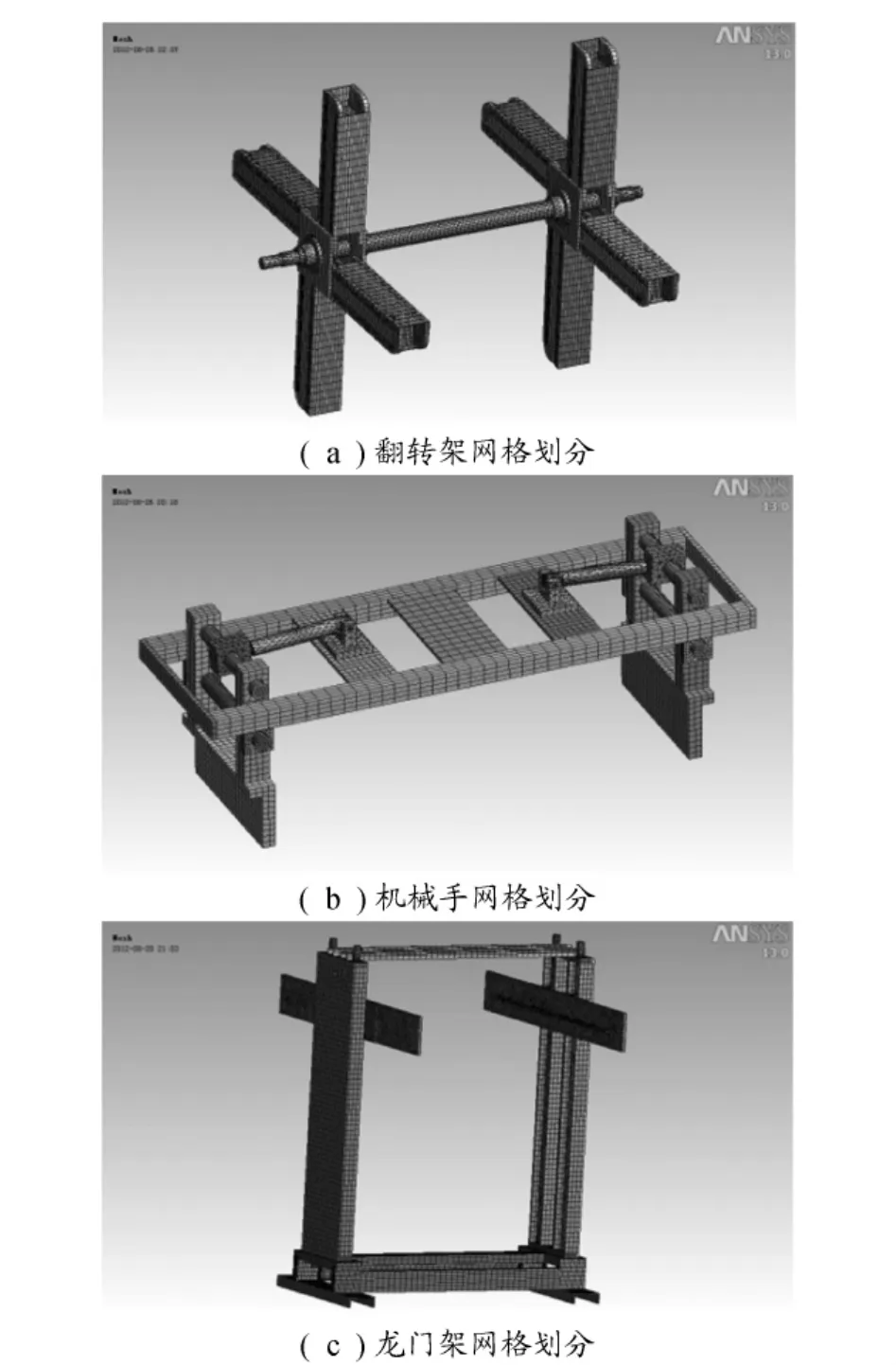
图2 分料机主要部件网格划分模型图
3 机械手变形分析及机构改进
机械手除了自身的重力外,主要承受气缸给的推力、砌块在被夹紧时给侧板的压力和沿侧板向下的摩擦力。根据机械手的实际工作情况施加载荷和约束,机械手的变形位移云图如图3(a)所示。
机械手在静力作用下,侧板向外弯曲,机械手框架的方钢、气缸座及气缸座板均向下弯曲变形,最大变形量为0.55941mm。从框架方钢位移曲线(如图3(b)所示)可知,方钢呈现U变形,在方钢中间位置达到最大变形量。而机械手侧板的位移曲线(如图3(c)所示)基本呈直线状,说明机械手侧板本身变形并不是很大,侧板向外扩张主要是受方钢和气缸固定座板弯曲变形的牵动。所以,对机械手进行改进时,侧板简单加上三角形肋板即可,主要对方钢和气缸固定板处进行改进。
机械手结构改进方案及结果如图4所示。
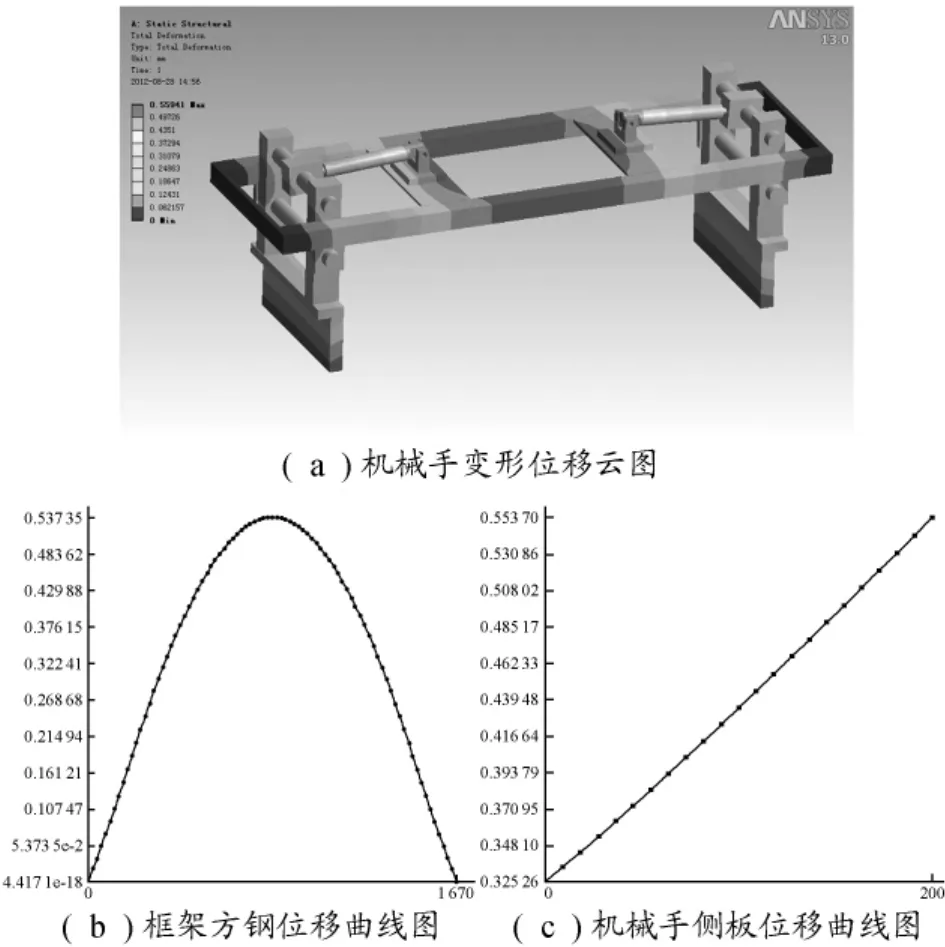
图3 机械手变形分布图
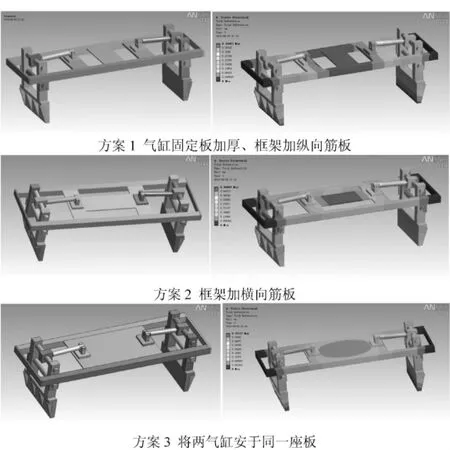
图4 机械手结构改进及位移云图
机械手结构改进后,变形情况都是框架方钢向下弯曲,侧板向外伸张。3种方案机械手最大变形量依次为0.40963mm,0.49807mm,0.37127mm。比较可知,方案3的改进大大降低了机械手的变形程度,所以方案3可以作为机械手的设计结构。
4 翻转架变形分析及机构改进
翻转架的静态载荷为:翻转架自身的重力和砌块对翻转叶面的压力,翻转架轴的两端受到轴承的支撑。翻转架的变形位移云图如图5所示。
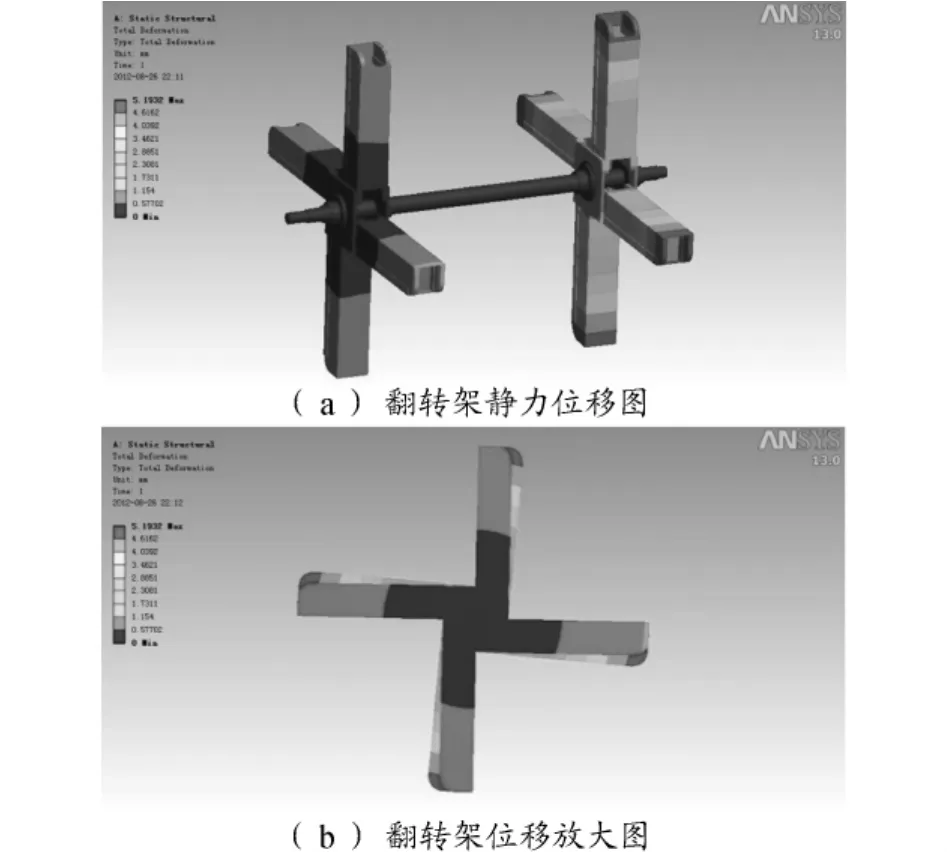
图5 翻转架变形云图
由图5(a)可知,变形最大的地方位于前轴端处的翻转叶片顶端,最大位移为5.1932mm。从图5(b)可知,前轴端处叶片在砌块压力作用下整体发生扭转,从而与后轴端处叶片不在同一平面上,呈现一定的倾角。此翻转架在对砌块进行翻转时,会影响砌块两端起落的同步性。翻转架的改进情况如图6所示。
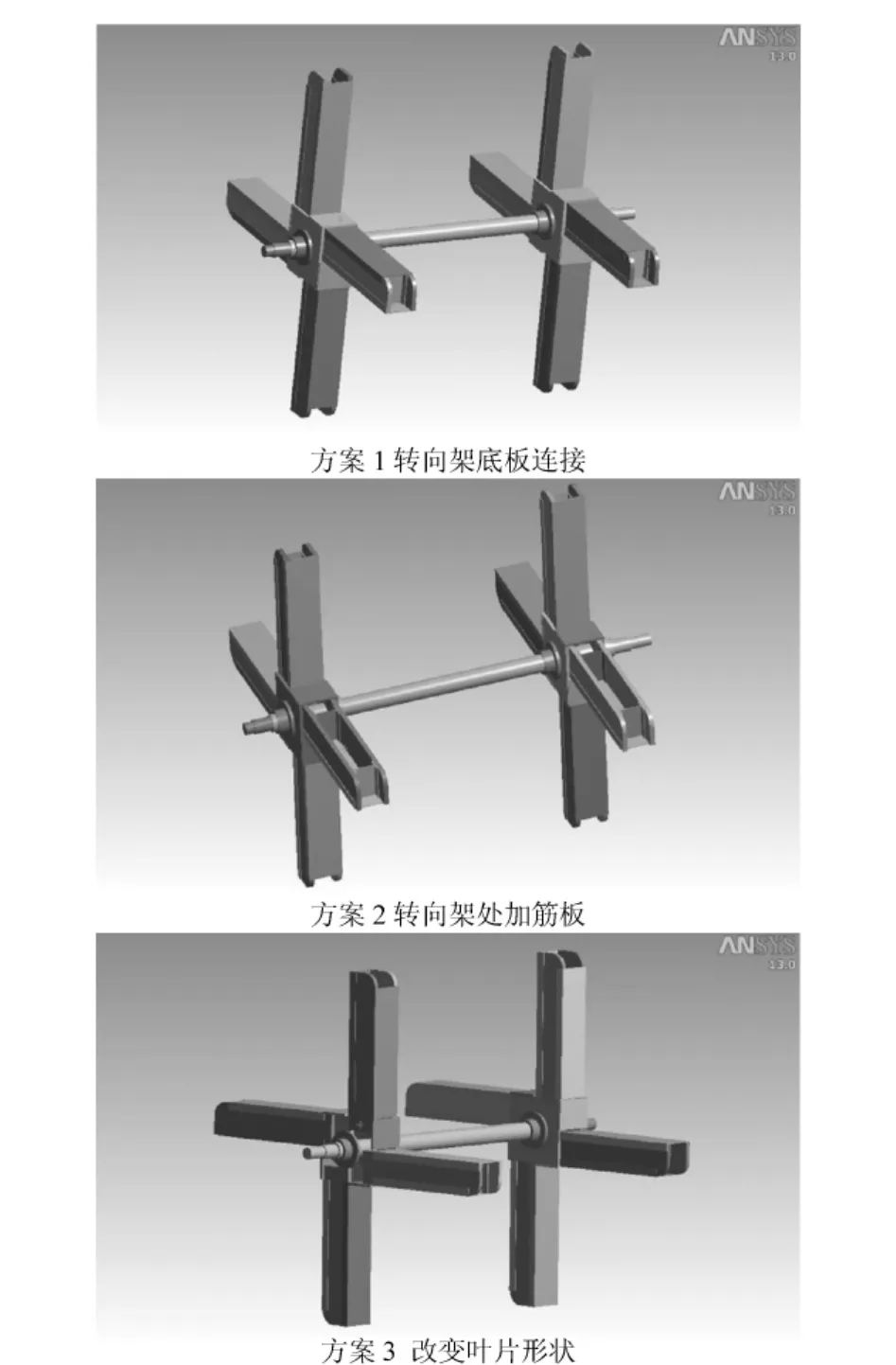
图6 翻转架结构改进图
经过改进后,翻转架的最大变形处仍位于前轴端处翻转叶片的顶端,但是变形量减小。由表1可知方案3的改进最有效,经计算此时翻转架扇叶变形后的偏转角度大概为0.06°,因此选择方案3作为翻转架的最终设计结构。

表1 不同方案下翻转架位移结果对比 mm
5 龙门架变形分析及结构改进
龙门架中导向板承载着整个机械手,导向板的力学性能直接影响着机械手在水平方向的运动。在这里对龙门架进行静力学分析,主要是看这些零部件的受力及变形状况。对龙门架进行加载和约束后,其变形状况如图7所示。

图7 龙门架位移云图
从图7可以看出,龙门架最大位移位于导向板顶端,顶端向内弯曲变形,最大位移为0.55433mm。机械手在变形的导向板上运动,产生的后果:一是机械手左右不对称运动,机械手框架出现倾斜,容易与左右导板发生碰撞甚至卡死。二是导轨向下弯曲,也就意味着机械手下降的位置会比之前要低,在放置砌块时,砌块就容易与辊子输送机发生碰撞。针对龙门架的变形状况,现将龙门架左右导向板用槽钢连接,结构如图8(a)所示。龙门架经过改进后,变形位移云图如图8(b)所示,从图可知,龙门架的最大变形已经从左右导向板前端转到加强槽钢中间部分。左右导向板的最大变形量为0.13898mm,可见此结构的改进获得了成功。


图8 龙门架结构改进及位移云图
6 结束语
本文运用有限元技术对陶粒砌块分料机进行了静力学分析,针对其薄弱环节进行了结构的改进,提高了分料机的静刚度,使分料机的性能得到了改善。有限元模型的建立与分析使设计者在产品的设计阶段就可评估未来系统的静态特性,从而为方案评估以及结构的优化提供理论依据。将有限元分析技术与分料机的设计结合起来,不仅缩短了设计周期、降低了设计成本,还使得分料机的设计更加完美,性能更加可靠。
[1] 周炫,喻晓林,李晓健.复合保温砖的研究与发展[J].砖瓦,2007(9):90-95.
[2] 范锦忠.陶粒泡沫混凝土砌块[J].砖瓦,2009(7):44-47.
[3] 刘苏文.陶粒生产轻质保温小砌块工艺[J].科技纵横,2009(5):20-23.
[4] 赵汝嘉.机械结构有限元分析[M].西安:西安交通大学出版社,1990.
[5] 吕东升,王东方,苏小平.基于HYPERWORKS的某客车车架有限元分析[J].机械设计与制造,2011(3):11-12.