Design,analysis and control for an antarctic modular manipulator
2013-11-05JIANGZhihong蒋志宏LIHongjie李洪杰XIAOTao肖涛YUANBaofeng袁宝峰LIHui李辉DONGQue董悫WEIBo魏博
JIANG Zhi-hong(蒋志宏), LI Hong-jie(李洪杰) XIAO Tao(肖涛),YUAN Bao-feng(袁宝峰), LI Hui(李辉) DONG Que(董悫) WEI Bo(魏博)
(1.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China;2.China Academy of Space Technology,Beijing 100094,China)
The Antarctic scientific expedition is of unparalleled strategic significance from the political,military,energy and economic aspects[1-3].The Antarctic scientific study directly expands human’s knowledge for Antarctic,what’s more,it can make agreat difference in the world's economic development and public life.Therefore it is important and urgent to carry out scientific experiments for Antarctic[4-5].
The Antarctic environment is very complex,which is covered by the Antarctic ice sheet averaging at least 1.6km thick[6].The frequent small spatial and temporal scale weather system and the harsh Antarctic environment are the main choke points for further Antarctic scientific exploration.With the expansion of the Antarctic scientific expedition,an urgent need is to develop intelligent robots for future expedition.The use of intelligent robots can not only lower the risk and cost of scientific expedition but also improve the operational efficiency and scope[5,7].To ensure the robot can move and work by itself,the robot must be equipped with a multifunction robot manipulator.With the help of the robot manipulator,a robot can complete various tasks such as soil collection,detecting the ground,grasping and placing objects and so on.
The robot manipulators which are currently used for industry or academic researches,however,usually have lots of shortcomings,such as large volume,heavy weight and difficulty in assembling and disassembling,etc.Sometime they even can’t work when used for Antarctic expedition by the following reasons:
①Parts are designed all separately,which leads to unreasonable assembling procedures.At the same time,components are difficult to disassemble and assemble rapidly when the robot manipulator needs to be repaired.
②The extreme environment is not taken into consideration during the design.The special polar environment calls for exploration and research innovation regarding robot manipulator technology in the fields of material,components,control and decision-making,etc[5].
As we all know,“modularity”is the inevitable trend in the information age[8].Modular design can not only improve the quality and performance of products but also make products have greater adaptability to fit different working situations.What’s more,modular design is capable of improving productivity,which can greatly increase the economic efficiency.Now,modular design method is widely used in most areas[9].
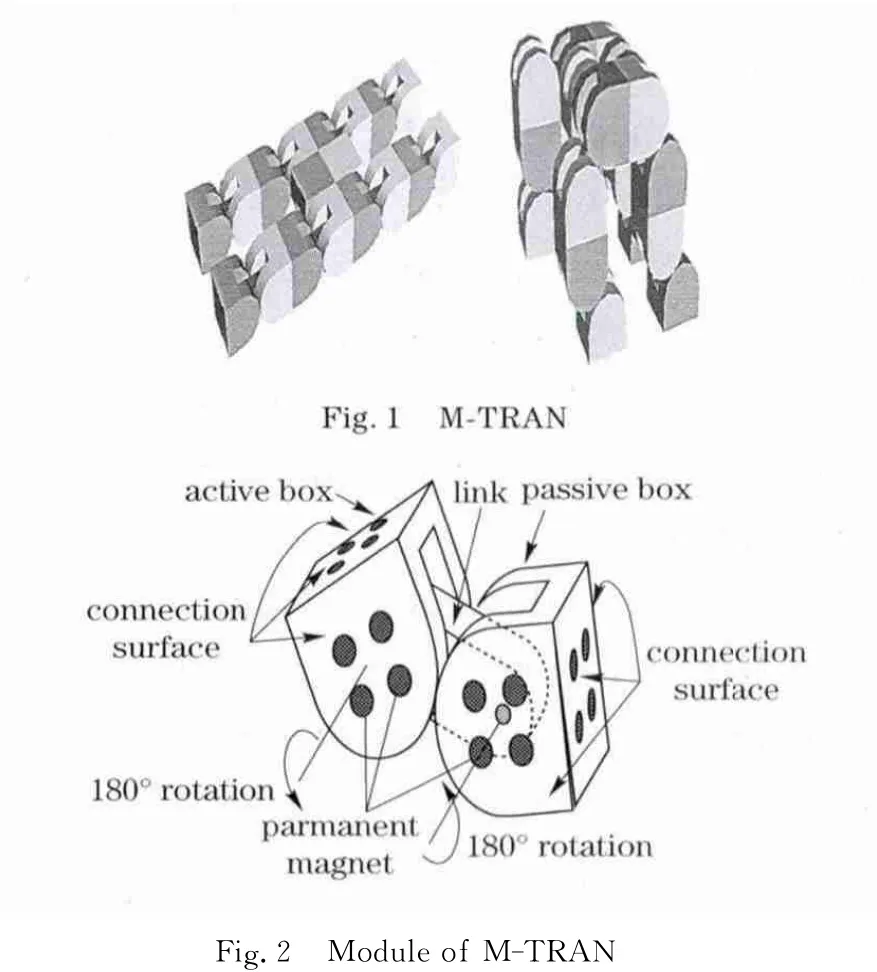
As shown in Fig.1,M-TRAN is a kind of robot having self-reconfigurability.The modular robot system makes full use of the modular design method[10].The overall robot is made up of a kind of module (Fig.2),which makes the robot can metamorphose into various shapes to meet the needs of different tasks.
According to the analysis above,modular design method should be applied to the Antarctic robot and the robot manipulator.
In this paper,modular design method is proposed to overcome the shortcomings that the current robot manipulators have.The robot manipulator has higher reliability and quick assembling-and-disassembling ability.To better adapt to the Antarctic environment,all wires are internally arranged and it can be preheated by itself as well as kept warm.At the same time,a new hybrid position/force control method is well studied to improve the performance of the Antarctic modular robot manipulator.
1 Antarctic robotic modular manipulator design
In view of the special environment and requirement of the Antarctic expedition,the Antarctic modular robot manipulator can be characterized by specific aspects as following:
①Omnibearing service
The environment in polar region is very complex.In order to make sure the Antarctic robot can work smoothly by itself,the Antarctic modular robot manipulator installed on the robot must be equipped with a cameras,and a lighting equipment,etc.Meanwhile,the robot manipulator must have at least 6DOFs.
②Modularity
Modular design can improve the productivity and lower the cost.Above all,modular design can achieve quick assembling and disassembling,which is of great practice significance especially when the manipulator needs to be repaired.
③Compactness
Compact structure can reduce the mass of the manipulator.Furthermore,it is convenient to reheat and keep warm the manipulator.
④High reliability
The Antarctic modular robot manipulator usually works in regions where the researchers can’t approach.So the robot manipulator has to have high reliability in order to ensure the robot manipulator has a long working time.
To make sure the Antarctic modular robot manipulator has these properties,the next section clearly describes the design procedure.
1.1 Joint modules
The revolute joint module is the most important part of the robot manipulator,which directly influences the quality of a robot manipulator.Joint module is a kind of mechanical and electrical device.The requirements such as standardization,generalization and normalization must be considered when the joint module is designed,so the joint module is interchangeable[11].Through the analysis of the current robot manipulator,there are two kinds of revolute joints:turnover joint and swinging joint(Fig.3).If the two joint modules are designed,the Antarctic modular robot manipulator can be assembled quickly via connection mechanism.

Fig.3 Two kinds of revolute joints
The two joint modules are shown in Fig.4and Fig.5.They are composed of motor,shell,harmonic gear reducer output shaft and rolling bearings,etc.If the output torque is not sufficient,a gear reducer can be installed between the motor and the harmonic gear reducer.
These two kinds of joint module are proposed based on modular design method,which have advantages such as compact structure,high transmission precision,small volume and light weight,etc.In addition,these joint modules have standard mechanical and electric interfaces so that it is convenient to assembling and wiring.The compact structure is good for preheating the Antarctic modular robot manipulator.Therefore the Antarctic modular robot manipulator made up of these two joint modules can better adapt to Antarctic environment.

1.2 Dexterous hand
In order to assist the Antarctic modular robot manipulator to complete some complex operational tasks,a kind of dexterous hand is proposed in this paper(Fig.6).The driving mode of the hand can be ranged from under-actuated mode to actuated mode.The hand is driven by 8motors,and the hand has 8to 17DOFs.

Fig.6 A sketch of the proposed structure for the dexterous hand
In general,tendon is good at delivering force with small weight,and it can also realize remote transmission with less space and cost.So tendon is a good transmission medium.In this paper,tendon is applied to the dexterous hand.It is known that under-actuated hand has simple control system,big output force and good grasping adaptability.Meanwhile,actuated hand can realize precise control.These two kinds of hand both have their strong points.So the dexterous hand proposed in this paper has a good performance even when the working condition changes.
1.3 Wiring scheme
The wiring of the Antarctic modular robot manipulator must be studied because of the bad weather.In such a cold environment wires are easy to be damaged,so all wires should be arranged inside the robot manipulator to make the manipulator more compact.The compact structure is good for the ro-bot manipulator working,and it also increases the lifetime of the manipulator.The wiring scheme is shown in Fig.7.Besides,there are electric interfaces on joint modules so that connection between the joint modules and driving controllers can be easy and quick.The wiring scheme is also convenient to repair.

Fig.7 Wiring schemes of the joint module
1.4 Antarctic modular manipulator
Fig.8shows the structure of the Antarctic modular robot manipulator.To ensure that the Antarctic modular robot manipulator can provide omnibearing service,the manipulator must have at least 6DOFs.The more DOFs the Antarctic modular robot manipulator has,the more flexible the manipulator is.However,too many DOFs will result in a complex structure with a large volume,etc.In this paper,the Antarctic modular robot manipulator has 6 DOFs.In addition,the mechanical interfaces between swinging joint module and turnover joint module are shown in Fig.9.The length of the forearm and the upper arm can be modified by changing the mechanical interfaces.

Fig.8 Sketch of the Antarctic modular robot manipulator
1.5 Thermal control
Regular machine can’t work well in Antarctic because of the extremely cold environment.Therefore thermal control of the Antarctic modular robot manipulator must be considered.Fig.10shows a kind of heating plate and thermistor,which can be used to preheat the manipulator and control the thermal of the manipulator.To keep the Antarctic modular robot manipulator warm,it should be covered with an insulation layer.With the help of these materials the Antarctic modular robot manipulator can work smoothly.

2 Work space analysis
Fig.11shows the reference coordinate system and the joint coordinate systems of the Antarctic modular robot manipulator.The manipulator has 6 DOFs,which is 3-D open-loop chain system.
When the Antarctic modular robot manipulator works,the scope that the origin to the coordinate system of the dexterous hand can reach is defined as the reachable workspace of the Antarctic modular robot manipulator.The inverse-kinematic equation doesn’t havea solution.With regard to dealing with instructions and making path planning,it is of great meaning to analyze the reachable workspace of the Antarctic modular robot manipulator.
The reachable workspace of the Antarctic modular robot manipulator is deduced as follows:
① Whenθ6is rotated from 0to 180°,the position of the origin to the coordinate system of the dexterous hand is unchanged.
② Whenθ5is rotated from 0to 360°,the position is also unchanged.
③ Whenθ4is rotated from 0to 180°,the motion trajectory of the origin is a semi-circle as shown in Fig.12.


Fig.12 Semi-circle forms when the fourth joint rotates
④ Whenθ3is rotated from 0to 360°,the motion trajectory of the origin is a semi-sphere surface as shown in Fig.13.

⑤ Whenθ2is rotated from 0to 180°,the motion trajectory of the origin is like a half of annulus as shown in Fig.14.


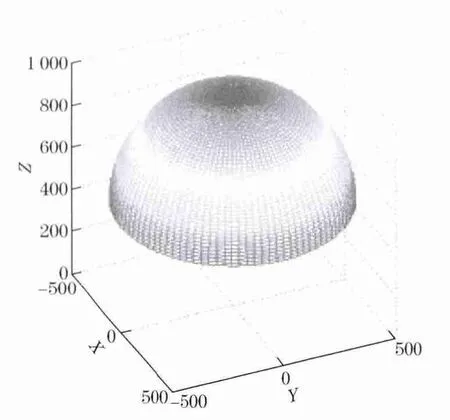
Fig.13 Semi-sphere surface forms when the third joint rotates

Fig.14 Body like half of annulus forms when the second joint rotates
⑥ Whenθ1is rotated from 0to 180°,the motion trajectory of the origin is a body like a hat as shown in Fig.15.


Fig.15 Body like a hat forms when the second joint rotates
Through the above analysis,it is concluded that the reachable space of the Antarctic modular robot manipulator is a symmetrical region shown in Fig.15.
3 New hybrid position/force control method
When the Antarctic modular robot manipulator carries out missions,sometimes it can’t complete the missions by just using the position control method.Especially when the Antarctic modular robot manipulator grasps an object,it isn’t always more steady when the grasping force becomes bigger.What’s worse,it can destroy the robot manipulator system or the object.So a new hybrid position/force control method is proposed in this paper.
The dynamic model of the Antarctic modular robot manipulator in Cartesian coordinate system is:
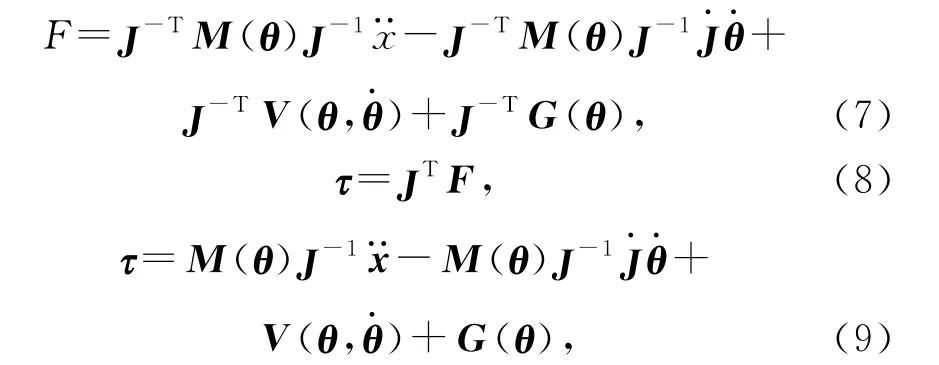
whereFis the force or moment acting on the end of the Antarctic modular robot manipulator;M(θ)is the mass matrix of the Antarctic modular robot manipulator;V(θ,)is centrifugal force and Coriolis force vector;G(θ)is the gravity vector;Jis the Jacobian matrix;τis the linear driving force reacting on the joint of the Antarctic modular robot manipulator or the knuckle on the dexterous hand.
Defining

Substituting Eqs.(7)-(10)will get

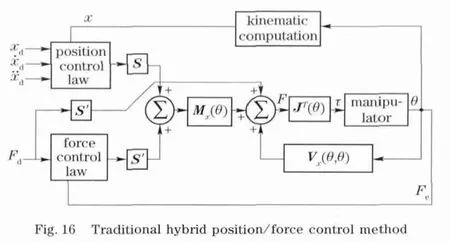
Using Eqs.(9)(11)can get the traditional hybrid position/force control method as shown in Fig.16.
In Fig.16,the matrixSandS′are the matrixes for control mode selection.MatrixSis a diagonal matrix,the elements on the diagonal is 1and 0.When it is in the position control mode,the elements ofSare 1,while the elements ofS′are 0.As to force control,the situation is adverse.
The traditional hybrid position/force control method only considers the dynamic model of robot system without taking the motor system into account.In this paper,a new hybrid position/force control method is proposed on the basis of the traditional method.The new method is more precise via adding the dynamic model of the motor.
The Antarctic modular robot manipulator is driven by permanent magnet synchronous motors.The dynamic model of the permanent magnet synchronous motor is
In practice,to control PMSM the currentidis zero.Eq.(12)can be simplified as

From the definition of Jacobian matrix,we get

The differential of Eq.(15)is


The process above realizes the dynamics decoupling of the Antarctic modular robot manipulator.
Define

From the traditional hybrid position/force control method,the new hybrid position/force control method can be deduced as shown in Fig.17.This new hybrid position/force control method takes the motor dynamic model into account.
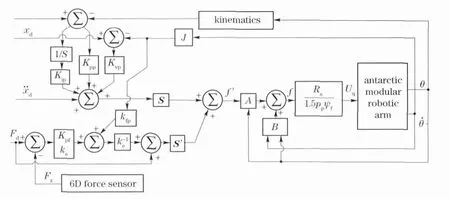
Fig.17 New hybrid position/force control method
4 Simulations and experiment
In order to verify the efficiency of the new hybrid position/force control method,several simulations are carried out in ADAMS.Fig.18shows the process of the simulations.The simulation is to use the Antarctic modular robot manipulator to put a stone on the test bed.Because of the specialization of the model,the torques of joint 1,3and 5stay zero all the time,so the results are not shown.
As shown in Fig.19,when the Antarctic modular robot manipulator is controlled just by using position control method,the torque curves of the joints can be summarized as following:when the stone doesn’t contact the test bed,the curves are continuous and smooth.However,when the stone contacts the test bed,the curves have great mutations.The mutations are harmful to the Antarctic modular robot manipulator as well as the test bed and the stone.
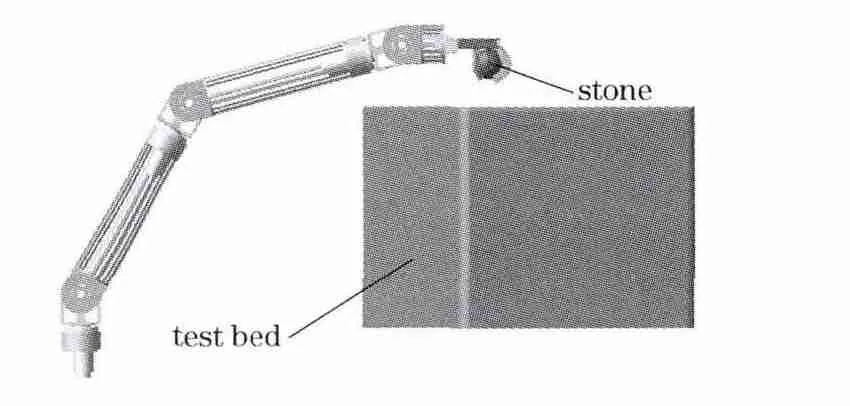
Fig.18 Sketch of the simulations and experiment
As shown in Fig.20,when the Antarctic modular robot manipulator is controlled by using the new hybrid position/force control method,the torque curves of the joints can be summarized as following:when the stone doesn’t contact the test bed,the curves are continuous and smooth,and it’s the same as Fig.19.It’s position control method.However,when the stone contacts the test bed,the curves don’t have big mutations.The little mutations are reasonable due to the delay of the system,and it won’t cause damage to the Antarctic modular robot manipulator.
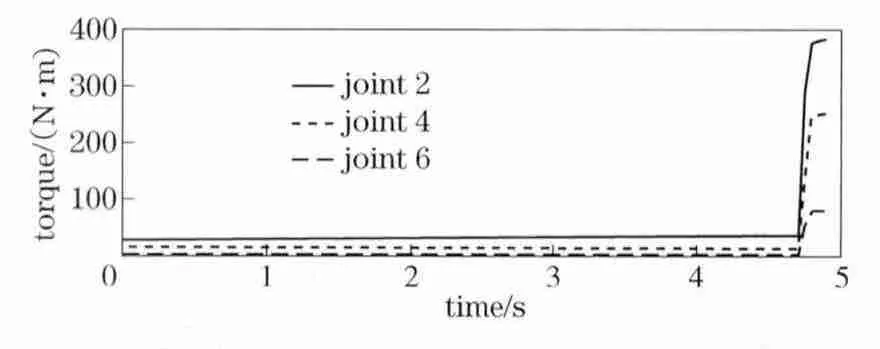
Fig.19 Torque curves of joints when using position control method

Fig.20 Torque curves of joints when using the new hybrid position/force control method
To check out the veracity of the simulations,an experiment is performed.In general,the torque is hard to measure,but it is proportional to the current of the motor,so the currents of the motors can be used to verify the simulations.In this paper,a DSP in the driving controller is used to take samples.The data are listed in Tab.1,Fig.21and Fig.22show the fitting curves of the experiment.

Tab.1 Currents of joint motors in different control modes
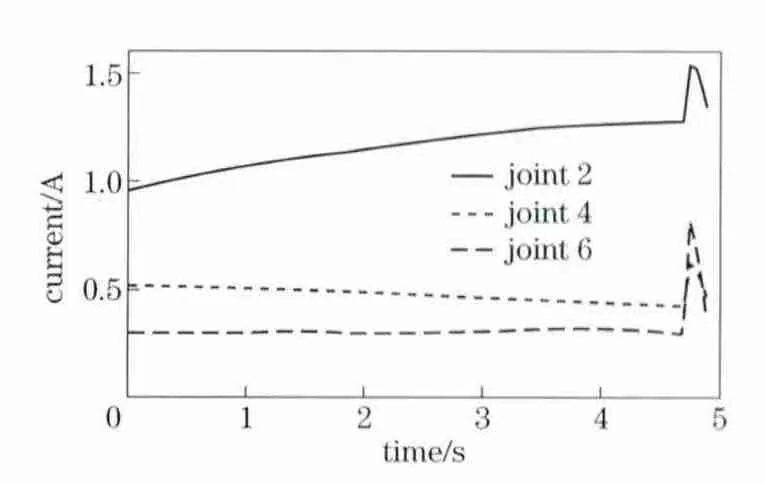
Fig.21 Fitting curves of currents when using the new hybrid position/force control method
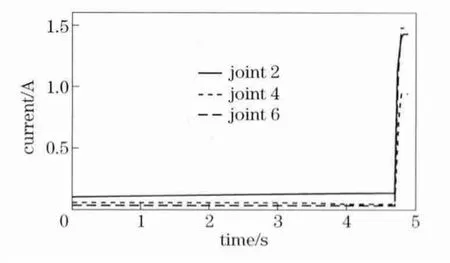
Fig.22 Fitting curves of currents when using position control method
Trough analyzing the data and curves,it is concluded that the new hybrid position/force control method is effective.
5 Conclusion
In this paper,according to the particularity of the Antarctic environment as well as the shortcomings of the current robot manipulators,an Antarctic modular robot manipulator is proposed to serve the Antarctic expedition.Considering the shortage of position control method,a new hybrid position/force control method is studied.The new control method can greatly improve the performance of the Antarctic modular robot manipulator.
[1] Chen Danhong.Accelerate and advance the scientific investigation in Antarctic to change from the scientific research and develop to resources and scientific research simultaneously[J].Ocean Development and Management,2004,21(3):37-40.(in Chinese)
[2] Zhang Lin.The Antarctic treaty system and maritime rights and interests protection of China[J].Ocean De-velopment and Management,2008,25(2):69-74.(in Chinese)
[3] Chen Liqi.Study on the role of the Arctic and Antarctic regions in global change[J].Earth Science Frontiers,2002,9(2):245-253.
[4] Zhu Jiangang,Yan Qide,Ling Xiaoliang.The analysis of Antarctic resources and their exploitation and potential utilization[J].China Soft Science,2005(8):17-23.(in Chinese)
[5] Li Bingrui,Qin Weijia.Guo Jingxue,et al.Experimental application of intelligent robot technology in Antarctic scientific expedition[J].Chinese Journal of Polar Science,2010,21(1):91-99.
[6] Ling Xiaoliang,Wen Jiahong,Chen Danhong,et al.The study on the Antarctic environment and environmental protection problems[J].Ocean Development and Management,2005,5(1):3-15.(in Chinese)
[7] Apostolopoulos D,Wagner M D,Shamah Betal.Technology and field demonstration of robotic search for Antarctic meteorites[J].International Journal of Robotics Research,2000,19(11):1015-1032.
[8] Tong Shizhong.Modern modularity and modular era[J].World Standardization and Quality Management,2007(12):6-10.
[9] Yang Xiaolan.The study of modularity design technology[J].Journal of Henan Mechanic an Electric Engineering College,1999,7:595-599.
[10] Satoshi Murata,Eiichi Yoshida,Akiya Kamimura,et al.M-TRAN:self-reconfigurable modular robotic system[C]∥Satoshi Murata.IEEE/ASME Transactions on Mechatronics.London:IEEE,2002:431-441.
猜你喜欢
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Numerical simulations of stress wavepropagation and attenuation at arc-shaped interface inlayered SiC/Al composite
- Acylation of 3,4-Diaminofurazan
- Low spurious noise frequencysynthesis based on a DDS-driven wideband PLL architecture
- Simulation of multiphase boost DC-DC converter with the stable control strategy
- Fuzzycontrol method to minimize the needle deflection duringneedle insertion therapy
- Numerical studyon the shock responses of submunition dropon various mediums