汽车悬架控制系统的类型与方法研究
2013-10-25李靖
李 靖
汽车悬架控制系统的类型与方法研究
李 靖
(武汉理工大学 汽车工程学院,湖北 武汉 430070)
分析了汽车悬架控制系统的基本类型及其特点,重点探讨半主动控制和主动控制悬架系统中常用的几种控制方法。并为今后汽车悬架控制系统的发展方向提出了些许建议。
汽车;悬架;主动控制;半主动控制
悬架是现代汽车的重要总成之一,是提高车辆平顺性(乘座舒适性)和安全性(操纵稳定性)、减少动载荷引起零部件损坏的关键,但基于经典隔振理论的传统悬架无法同时兼顾这三方面的要求。从上世纪70年代起,国外一些专家学者就开始研究基于控制技术的主动/半主动悬架系统。引入控制技术后的悬架是一类复杂的非线性动力系统,其研制及应用涉及机械动力学、测控技术、电子技术、流体传动及控制、计算机技术、非线性力学等许多学科。
1 车辆悬架控制系统的类型
车辆悬架的振动控制可分为被动控制、半主动控制和主动控制三种基本类型。凡不需要输入能量的振动控制称为被动控制;输入少量能量调节阻尼系数的控制称为半主动控制;通过输入外部能量使控制机构给于悬架系统施加一定控制力的振动控制称为主动控制。
1.1 被动控制悬架
汽车被动控制悬架(被动悬架1/4车型简图如图1)由于无需输入外部能量和结构简单等优点而得到广泛应用。但随着汽车性能的不断完善与发展,对悬架提出更高的要求。为满足现代汽车对悬架提出的各种性能要求,悬架的结构形式一直在不断地更新与完善。尽管如此,传统的被动控制依然受到许多限制,主要是难于同时改善在不同路面上高速行驶车辆的稳定性和行驶平顺性。因此,被动控制的减振效果较差。
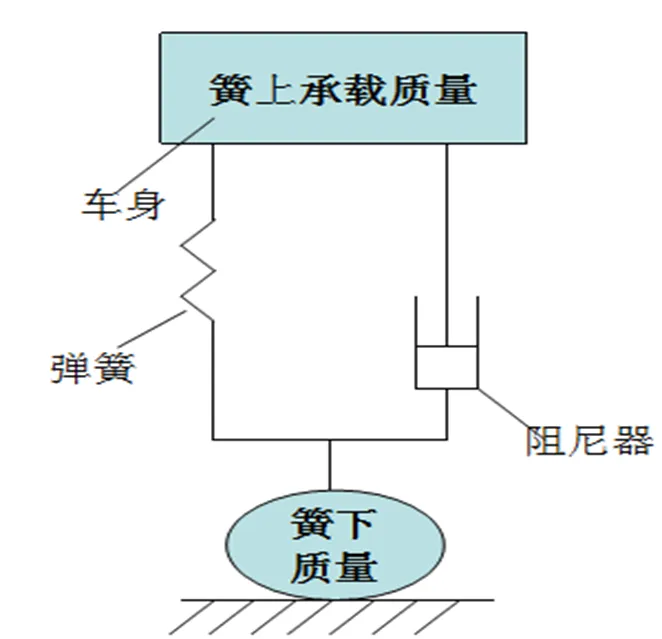
图1 被动悬架
1.2 半主动控制悬架
汽车半主动悬架(半主动悬架1/4车型简图如图2)由可变特性的弹簧和减振器组成。其基本工作原理是根据簧上质量相对车轮的速度响应和加速度响应等反馈信号,按照一定的控制规律调节可调弹簧的刚度或可调减振器的阻尼力。半主动悬架在产生力的方面近似于被动悬架,但是半主动悬架的阻尼系数或刚度系数是可变的。通常以改变减振器的阻尼力为主,将阻尼分为两和三级,由人工选择或根据传感器信号自动确定阻尼级。其研究工作始于1974年美国加州大学戴维斯分校Karno-pp的研究工作。通过输入少量控制能量调节减振器的液力阻尼, 改善悬架的振动特性。若以xa1表示悬挂质量(车身)速度,xa2表示非悬挂质量(车桥)速度,c表示阻尼系数,则Karno-pp控制规则的数学表达式为:
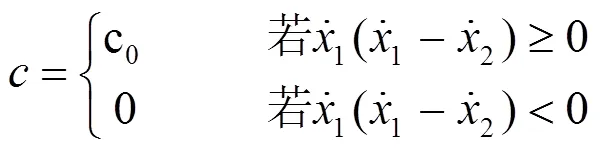
这一控制规则反映出,既要对作用在弹簧上、正比于车身绝对速度x1的振动进行抑制,也要使和弹簧变形速度(x1-x2)成比例的粘性阻尼力起作用,这是on和off的开关式控制方法。Hobslscher R,Huang Z用语言变量修改其控制规则的表达方式,则为
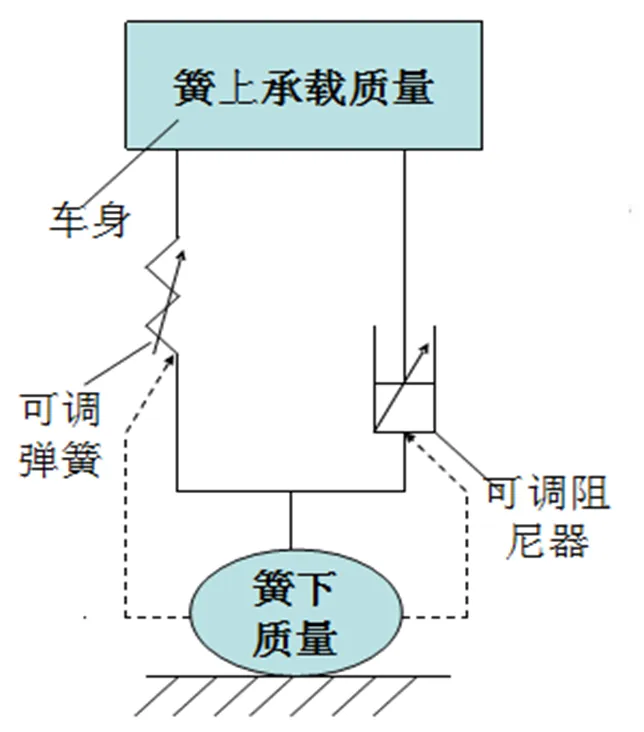
图2 半主动悬架
1.3 主动控制悬架
汽车主动控制悬架(主动悬架1/4车型简图如图3)是在被动悬架原有弹性元件和阻尼元件的基础上加一个主动力装置,设计者可根据预期目的, 通过这个主动力装置和预定的控制策略来改变悬架的特性,以获得较好的工况。主动悬架能够根据工况变化,实时主动地调整和产生所需的悬架控制力,以抑制车身的振动,使悬架处于最优减振状态,达到同时改善汽车行驶平顺性和操纵稳定性的目的。
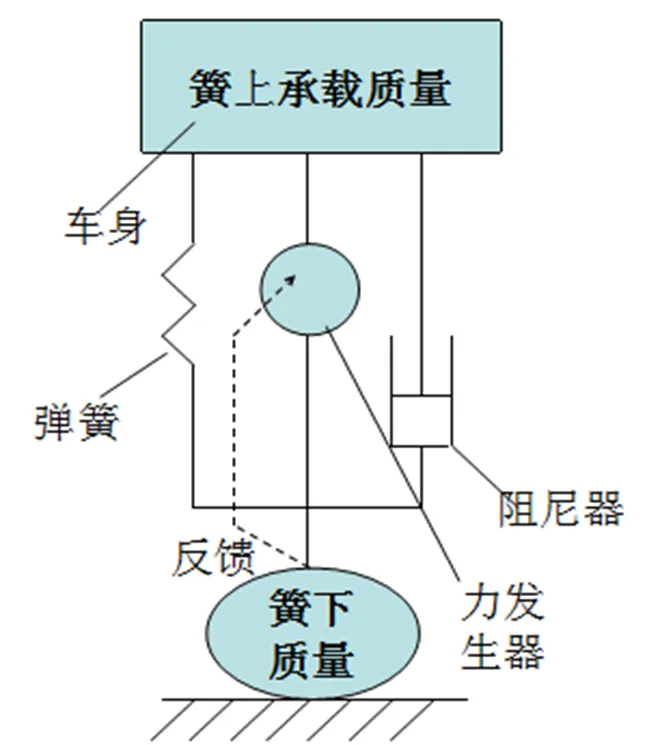
图3 主动悬架
主动控制悬架通常包括三部分:传感器、控制器以及执行机构,并由它们与汽车系统组成闭环控制系统。其中控制器是整个系统的信息处理和管理中心,它接受来自各个传感器的信号,依据特定的数据处理方法和控制规律,决定并控制执行机构的动作,从而达到改变车身的运动状态、满足隔振减振要求的目的。
2 汽车悬架系统的控制方法
汽车悬架控制系统大多由传感器拾取车身绝对速度、车身对车轮的相对速度、车身的加速度等信号,经计算机处理发出指令进行控制。由于车辆悬架控制系统是十分复杂的非线性动力系统,基于模型的线性反馈控制策略受到极大的限制。目前应用于车辆悬架控制系统的控制方法主要有天棚阻尼与开关阻尼控制方法,最优控制方法、自适应控制方法、基于遗传算法和神经网络控制的智能控制方法等控制方法。
2.1 半主动悬架常用的控制方法
70年代初,Crosby和Karnop首先提出了半主动悬架控制的概念,图4为典型的两自由度半主动悬架系统控制示意图。该系统由一弹性元件与可调阻尼器构成。此可调阻尼器在其力的产生方面非常相似于被动悬架中的阻尼器,但其阻尼值是根据车身质量的加速度响应等反馈信号,按照一定的控制规律而瞬态变化的,因此其减振效果又接近于全主动悬架。由于半主动悬架中弹簧刚度为一定值,所以它的自适应性能要稍逊于全主动悬架。
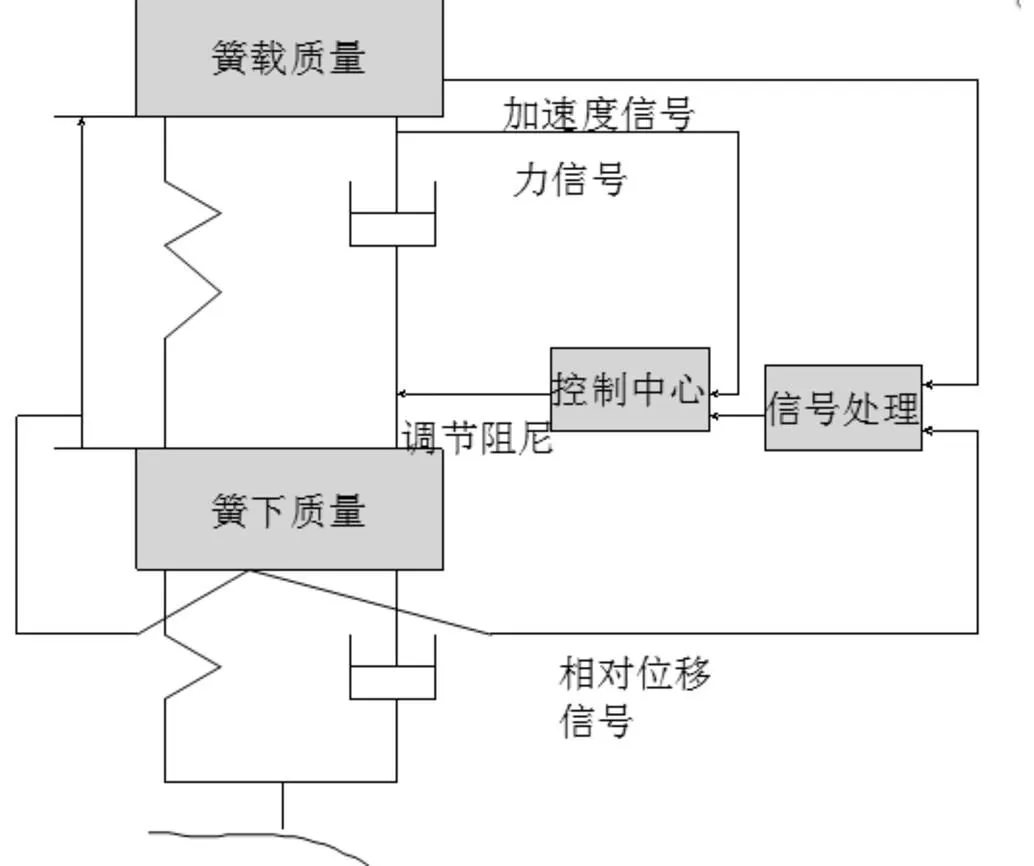
图4 典型的半主动悬架控制示意图
近年来,国内外学者应用控制理论在汽车半主动悬架控制系统的研究上做了大量的研究工作主要包括:最优控制、自适应控制、天棚阻尼与开关阻尼控制、模糊控制、预见控制和鲁棒控制等。
2.1.1 最优控制
应用于车辆悬架控制系统的最优控制方法可以分为线性最优控制、H∞最优控制和最优预报控制等三种。线性最优控制是建立在系统较为理想模型基础上,采用受控对象的状态响应与控制输入的加权二次型作为性能指标,同时保证受控结构动态稳定性条件下实现最优控制。把LQ(Linear Quadratic 线性二次型)调节器控制理论和LQG(Linear Quadratic Gaussian线性二次高斯型)控制理论应用于车辆悬架系统实现最优控制。H∞控制是设计控制器在保证闭环系统各回路稳定的条件下,使相对于噪声干扰的输出取极小的一种最优控制法。为了模拟由于车身质量、轮胎刚度、减振器阻尼系数以及车辆结构高频柔度模态等变化不确定的误差,应用H∞控制方法可实现车辆悬架振动控制具有较强的鲁棒性。最优预报控制是利用车辆前轮的扰动信息预估路面的干扰输入,预报控制的策略就是把所测量的状态变量反馈给前后控制器实施最优控制。
其中,LQR(linear quadratic regulator)即线性二次型调节器算法理论使用最为广泛,其对象是现代控制理论中以状态空间形式给出的线性系统,而目标函数为对象状态和控制输入的二次型函数。LQR最优设计是指设计出的状态反馈控制器K要使二次型目标函数J取最小值,而K由权矩阵Q与R唯一决定,故此Q、R的选择尤为重要。LQR理论是现代控制理论中发展最早也最为成熟的一种状态空间设计法。
算法概要如下:
设悬架自由度弹簧阻尼系统动力方程为:

2.1.2 自适应模糊控制
由于车辆悬架振动系统是含有许多不确定因素的非线性动力系统,难以用定常反馈系统达到预定的控制性能要求。应用于车辆悬架振动控制的自适应控制方法主要有自校正控制和模型参考自适应控制两类控制策略。自校正控制是一种将受控对象参数在线识别与控制器参数整定相结合的控制方法。模型参考自适应控制的原理是当外界激励条件和车辆自身参数状态发生变化时, 被控车辆的振动输出仍能跟踪所选定的理想参考模型。
自适应控制存在的问题表现在自校正控制过程需要在线辨识大量的结构参数,所以导致计算量大,实时性不好。而模型参考自适应控制方法涉及路面信息获得的精度问题,这一点与预测控制存在的问题相似。另外,当悬挂系统参数由于突然的冲击而在较大的范围变化时,自适应控制的鲁棒性将变坏。
2.1.3 天棚阻尼与开关阻尼控制
天棚阻尼与开关阻尼控制原理是在车身上安装一个与车身振动速度成正比的阻尼器,产生与车体绝对速度成正比的控制力,可以完全防止车身与悬架系统产生共振,达到衰减振动的目的。在天棚控制方式中,控制力取决于车体的绝对速度的反馈,不需要很多传感器也不需要复杂的数学模型,可靠性较好。
开关阻尼控制思想的阻尼力算法可用以下公式表示
2.2 主动悬架常用的控制方法
主动悬架控制机构是由电控单元ECU和传感器等组成的闭环控制系统,通过传感器监测道路条件、汽车运行状态,按照设定的控制规律向执行机构(空气弹簧、动力源等)适时地发出控制信号,以调节悬架刚度和阻尼系数,主动地调整和产生所需的控制力,使悬架始终处于最佳减振状态。典型的主动悬架控制示意图如图5。
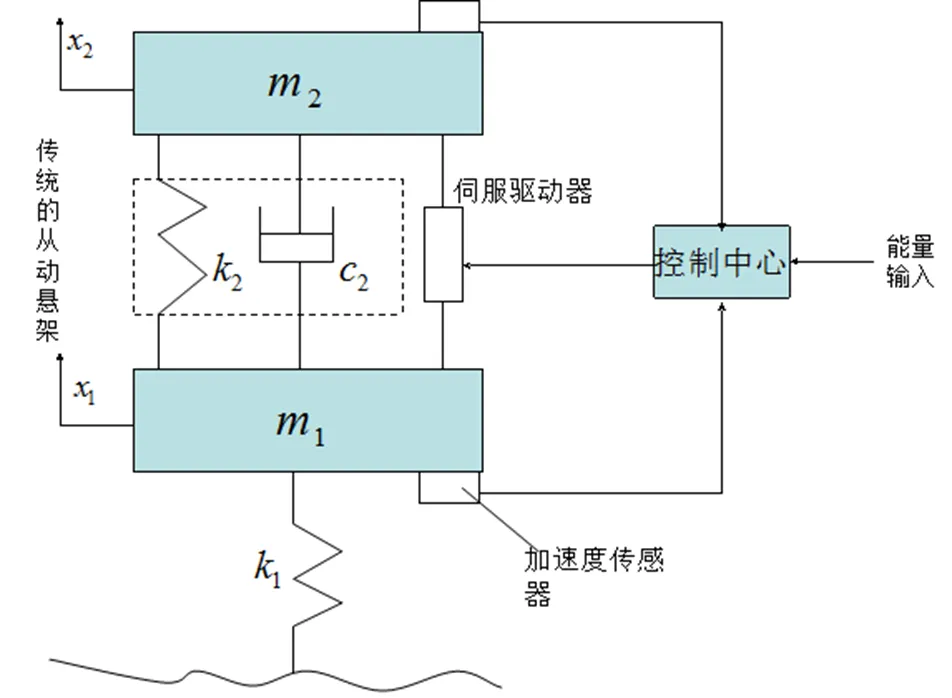
图5 典型的主动悬架控制示意图
其中,基于遗传算法和神经网络的车辆主动悬架控制技术、基于免疫算法的车辆主动悬架控制技术为两种十分典型的主动悬架控制技术。
2.2.1 基于遗传算法和神经网络的车辆主动悬架控制技术
遗传算法作为一种非确定性的拟自然算法,为复杂系统的优化提供了一种新的方法,实践证明其效果显著;其基本思想是模拟自然界遗传机制和生物进化论而形成的一种随机搜索与优化算法。人工神经网络是指将具有一定处理能力的单元按一定方式相互联结以模拟人类神经系统的信息处理机制,能够有效地解决各类复杂问题。

神经网络系统采用双隐层的结构,学习算法中的权系数学习规律采用学习率自适应调整与动量项相结合的改进算法,即

动量项使调节向着误差曲面底部的平均方向变化,起到缓冲平滑的作用,使学习速率加快。
遗传神经网络控制算法流程图见图6,采用神经网络对系统的动态响应进行模拟,同时应用遗传算法进行寻优,调整网络权值,使得悬架系统的动态响应达到预期效果。基于遗传算法神经网络的悬架控制方法对于改善车辆行驶平顺性有显著效果,所提出的控制方法对所建立的主动悬架模型有良好的适应性。
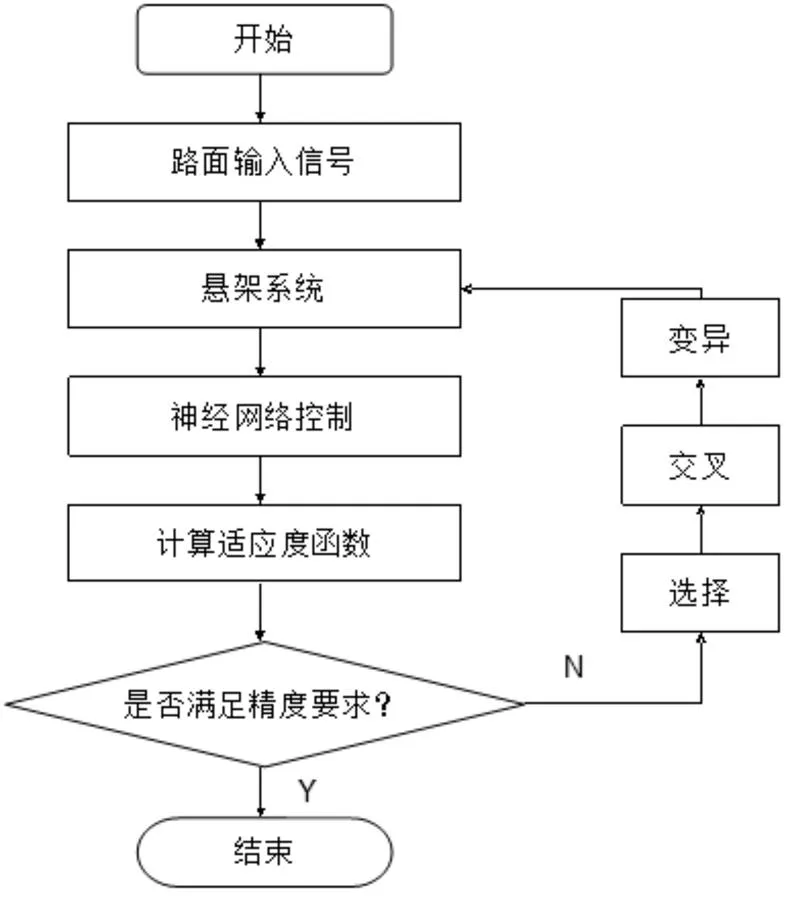
图6 控制算法流程图
2.2.2 基于免疫算法的车辆主动悬架控制技术
免疫的实质是抵御外界抗原侵入的自我保护能力和自适应能力。免疫算法的优点在于具有良好的系统响应性和自主性,有很好的智能型和鲁棒性,因此被运用到车辆悬架系统中,进行相应的系统仿真分析。
汽车主动悬架的免疫控制系统,以车身加速度和速度、悬架和车轮变形为输入,力发生器控制力为输出。免疫控制器在接受模型状态输入后,根据免疫算法得出最佳的控制力,从而使悬架的性能得到提高,其主动悬架的免疫控制系统框图见图7。免疫控制器在接受模型状态输入后,根据免疫算法得出最佳的控制力,从而使悬架的性能得到提高。算法实现流程见图8。
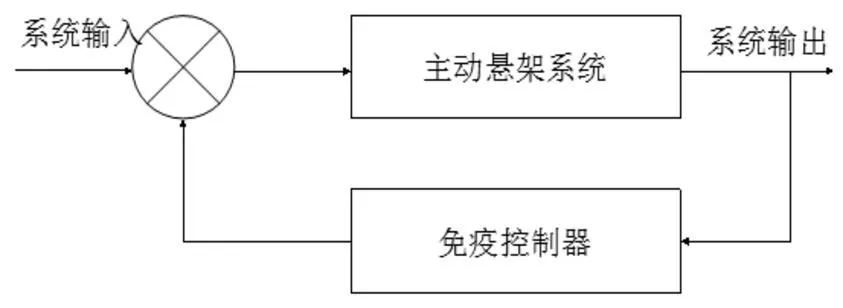
图7 汽车主动悬架的免疫控制系统框图
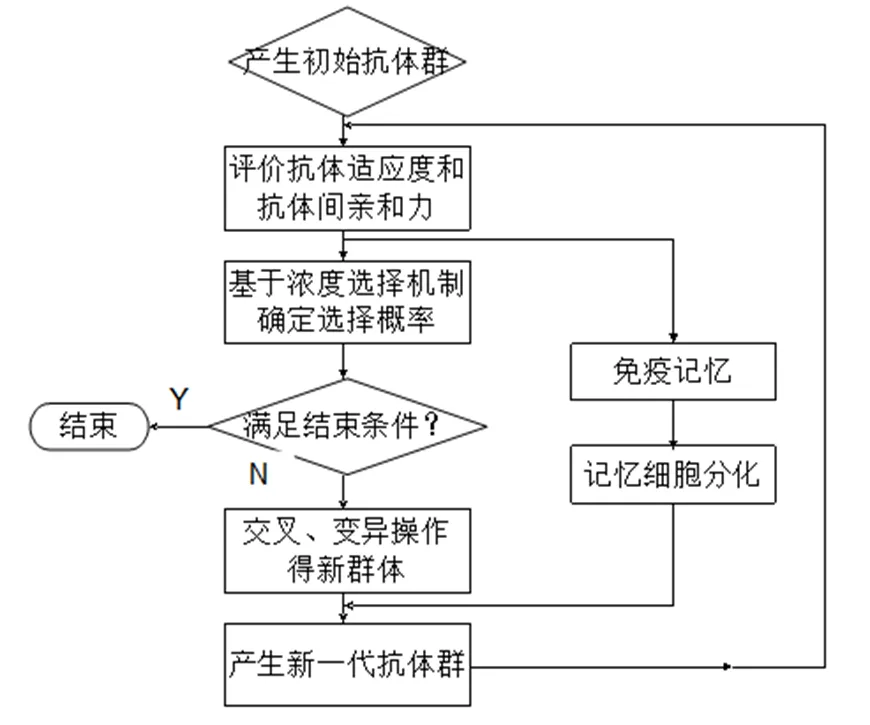
图8 免疫算法实现流程图
3 结束语
本文首先对三类悬架(被动悬架、半主动悬架、主动悬架)作了简单的叙述,然后分别阐述了半主动悬架和主动悬架常用的控制方法及理论。然而随着相关学科和高新技术的迅猛发展,特别是高效价廉微处理机的普及,使得研究实用的半主动和主动悬架振动控制系统成为现实。半主动悬架控制系统刚开始进入实际应用阶段;主动悬架控制系统由于其造价昂贵、需要额外的控制用功率等原因,至今仍停留在实验室和真车试验阶段。最后,为了更理想地实现汽车悬架控制系统的研究目标,必须解决如下几个方面的问题:(1)研制高效能的减振器,如液力减振器、阻尼连续可调的磁流变减振器等。尤其是以磁流变可控流体器件的半主动悬架系统,它具有结构简单、耗能低、反应迅速等特点,具有较为广阔的应用前景。(2)充分运用现代控制理论及相关学科的技术,处理好悬架系统的非线形控制问题,研制高效能、低成本的控制器。(3)目前主动悬架系统控制结构复杂,可靠性也难以保证,因此简化系统结构、提高可靠性和适应性也是重要的研究方向。
[1] 张庙康, 胡海岩. 车辆悬架振动控制系统研究的进展[J]. 振动、测试与诊断, 1997, 17(1):7-15.
[2] 管继富. 车辆半主动悬架自适应LQR控制[J]. 系统仿真学报,2004.16(10): 2340-2343.
[3] 祁建城, 李若新, 刘志国,等.汽车主动悬架最优控制[J]. 汽车工程, 1999,21(1) : 15-20
[4] 钱瑜. 汽车悬架分类及半主动悬架[J]. 江南学院学报, 1999, 14(4):73-76.
[5] 丁科,等. 车辆主动悬架的神经网络模糊控制[J]. 汽车工程, 2001,(5).
[6] 祁建城, 高延龄. 汽车主动悬架最优控制[J]. 汽车工程, 1999, 21(1):15-20.
[7] 孙求理,张洪欣. 主动悬架的发展和技术现状[J]. 世界汽车,1996,(5):4-6.
[8] R. G. M. Huinan.Preview estimation and control for semi-active suspensions[J]. Vehicle system, 2000,(2).
[9] Shiotsuka T,Egami M,Nagamatsu A. Design and control of dynamic compensator-type controller using neural network[J]. Transactions of the Japan Society of Mechanical Engineers, Part C,1994,60(572):1296-1302.
[10] Yoshimura T.Active suspension of vehicle system using fuzzy logic[J].International Journal of systems Science,1996,(2):215-219.
Study on the Type and Method of Automobile Suspension Control System
LI Jing
(School of Automotive Engineering, Wuhan University of Technology, Wuhan Hubei 430070, China)
This paper summarizes the basic types and characteristics of automobile suspension control system, focuses on the semi-active control and active control of several commonly used control methods of suspension system.And it puts forward some suggestions for the future development direction of automobile suspension control system.
automobile; Suspension; Active Control; Semi-Active Control
U463.33
A
2095-414X(2013)03-0052-05
李靖(1990-),男,硕士研究生,研究方向:汽车绿色可循环设计.