海底管道内检测器实时跟踪与精确定位
2013-10-23王少平刘金海唐建华
王少平,刘金海,高 丁,曲 杰,唐建华
(1.中海油能源发展油田建设工程公司,天津 300452;2.东北大学信息科学与工程学院,沈阳 110004)
管道内检测技术是一种重要的海底管道故障诊断方法,对海底管道的安全运行起到重要的保障作用。但在采用管道内检测方法时,需要实时确定内检测器在管道中的位置,尤其是当内检测器卡堵在管道中时,更需要及时精确地确定内检器在管道中的位置,以便采取相应措施。现有管道内检测器定位技术有:传统里程轮定位法[1]、定点磁标法[2]、静磁场定位法[3]、放射性射线定位法[4-5]、GPS/INS组合导航系统定位法[6]。但这些方法通常只能应用于陆地管道,难以对海底管道内检测器进行跟踪,无法解决海底管道内检测器的实时跟踪与定位问题。
利用负压波方法实时跟踪管道内检测器,笔者通过OLGA软件搭建模型对此方法的可行性进行了仿真验证。由于负压波定位误差较大,难以实现精确定位,所以负压波只用来实时跟踪和粗略定位;当内检测器卡堵在管道中时,结合实时跟踪到的内检测器在管道中的粗略位置,将超低频电磁波发射源作为示踪源,利用其产生磁场的磁感应强度满足双峰对称分布的规律,对内检测器进行精确定位。
1 实时跟踪与精确定位方法
1.1 实时跟踪方法及原理
利用负压波跟踪管道内检测器通过三个步骤实现。
步骤一:压力信号发生。首先利用安装在内检测器两端的两个压力波发生器,同时产生两个大小相同的压力波。
步骤二:压力信号采集。通过管道首末两端高精度压力传感器采集压力数据,并利用GPS对数据采集时间精确同步。
步骤三:压力信号分析。将采集到的带有时间标签的压力数据进行分析,寻找压力波传播到管道首末两端的时刻,得到时间差。根据负压波时间差、负压波传播速度以及管道长度,确定内检测器在管道中的位置。
在短时间内重复上述3个步骤,即可实现对管道内检测器的实时跟踪,管道内检测器的实时跟踪的原理图如图1所示。

图1 管道内检测器实时跟踪示意图
根据图1所示的管道内检测器的实时跟踪的原理图,可以得到管道内检测器的实时跟踪的数学模型:
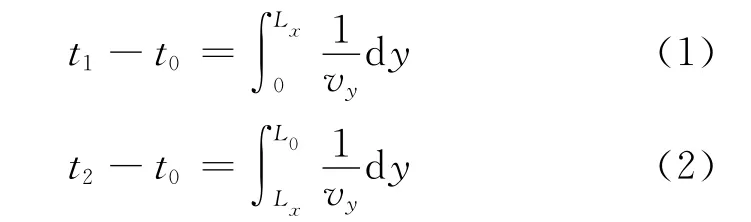
式中:L0为管道首端与末端间的距离,m;Lx为内检测器距离管道末端的距离,m;t0为安装在内检测器两端的压力波发生器产生压力波的时刻,s;t1为压力波发生器在t0时刻产生的压力波传播到管道首端的时刻,s;t2为压力波发生器在t0时刻产生的压力波传播到管道末端的时刻,s;vy为距离管道首端y处压力波传播的速度,m/s。
在常温管道中,压力波传播速度近似为一个定值v。令压力波传播到管道首端和末端的时间差Δt=t1-t2,代入到式(1)和(2)中可以得到:

式(3)即为管道内检测器实时跟踪的原理公式。从式(3)中可以看出,只要知道管道首端与末端间的距离L0(即管道长度),压力波传播速度v,便可以求得内检测器距离管道末端的距离Lx,由Lx即可确定内检测器当前时刻在管道中的位置。
1.2 精确定位方案设计
1.2.1 精确定位方法及原理
利用两个压力波发生装置产生的压力波达到时刻难以精确定位,因此在内检测器卡堵在管道中时,需要用另外的方法对内检测器进行精确定位。
利用超低频电磁波来精确定位管道内检测器[7]。超低频电磁波频率较低(频率范围为30~300Hz,波长为106~107m),若以传统电磁波的电偶极子为模型,其发射天线应与波长处于相同数量级,长度将达到几千千米,不适合实际应用[8],而超低频电磁波的磁偶极子模型是一种新的模型,能够描述超低频电磁波的规律,并且方便实际的工程应用。
超低频电磁波发射装置中螺线管(即发射天线)的半径R应远小于螺线管的长度l,此时将螺线管产生的磁场等效为由磁偶极子所产生的磁场,磁偶极子是由一对等量异号的点磁荷+qm和-qm组成[9],超低频电磁波的磁偶极子模型如图2所示。
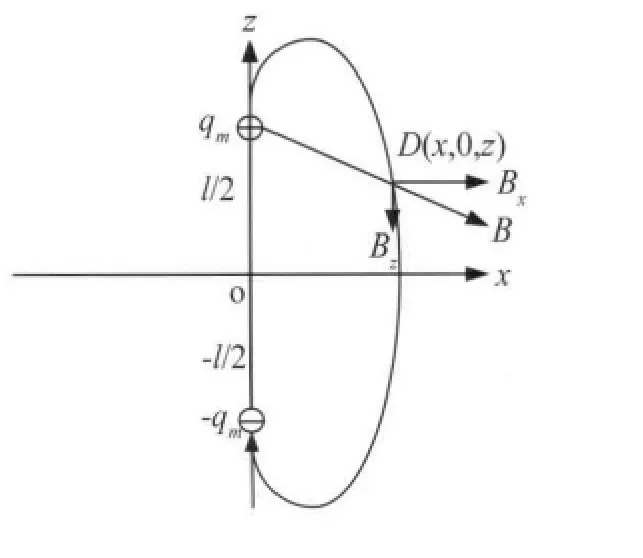
图2 超低频电磁波的磁偶极子模型
螺线管水平放置,z方向即是水平方向,x方向是与z方向相垂直的竖直方向。场点D上的磁场由磁荷+qm、-qm所产生的磁场矢量叠加而形成。磁偶极子在场点D处的磁感应强度B在x方向上的分量绝对值为:

式中:I为螺线管上的电流;R为螺线管的半径;l为螺线管长度;n为螺线管单位长度匝数;μ0为空气磁导率;x,z分别为磁荷的磁场矢量在x轴方向的值和在z轴方向的值。
根据式(4),可以得到螺线管产生磁场的磁感应强度B在x方向上的分量绝对值随z的变化曲线如图3所示。

图3 磁感应强度随着距离z的变化情况
超低频电磁波在空间分布的幅值与电磁场场点的位置密切相关,即随着超低频电磁波接收天线与发射天线位置(发射源的位置)的相对变化,接收天线上信号强度也相应地变化,所以利用超低频电磁波在空间上磁场强度的分布规律,即可以确定超低频电磁发射源的位置。当内检测器卡堵在海底管道中时,利用超低频电磁波可以实现管道内检测器的精确定位。
1.2.2 精确定位模块设计
管道内检测器精确定位模块主要包括:安装在内检测器一端的超低频电磁波发射装置、电磁波探测装置、精确定位的上位机这三部分。
管道铺设在近海的海底,安装在内检测器一端的超低频电磁波发射装置随内检测器一同在管道内部移动,当这个连接体在管道内部发生卡堵停止移动时,超低频电磁波发射装置作为示踪源,开始发射超低频电磁波。电磁波探测装置悬挂在海面作业船下方,位于管道上方10m的海水中,探测超低频电磁波发射装置发射的电磁波。
电磁波探测装置处在管道上方10m的海水中的优点是:① 超低频电磁波接收装置距离管道比较近,超低频电磁波发射装置以较小的发射功率发射超低频电磁波,超低频电磁波接收装置便可以探测到;② 电磁波在海水与空气的交界面会有折射和反射,如果超低频电磁波接收装置放置在海面上,不利于探测超低频电磁波发射装置发出的电磁波;③ 超低频电磁波接收装置距离海面作业船比较远,可以减弱作业船上发出的电磁波对其的影响。
超低频电磁波接收装置将接受到的电磁信号处理为数字信号后,通过RS485总线电缆以手牵手的方式将数据传送给上位机,上位机主要用来显示探测到的电磁波数值大小和语音提示是否探测到超低频电磁波发射装置与内检测器这个连接体。
在该设计中,电磁波探测装置处在管道上方10m的海水中,能够接收到的电磁波为原电磁波的77.79%,如果电磁波探测装置与管道的距离过大,电磁波衰减后的值会很小,难以探测;反之,则会对电磁波探测装置和上位机的通信产生影响,以及容易碰触到管道。
(1)超低频电磁波发射装置
超低频电磁波发射装置结构如图4所示。

图4 超低频电磁波发射装置结构
由图4可知,超低频电磁波发射装置包括有铁芯、螺线圈、骨架、外壁、控制单元、电池、通孔,其中铁芯、螺线圈和骨架构成发射天线,放置在超低频电磁波发射装置的上方,铁芯两端向上弯曲。其连接方式为:铁芯从骨架中间穿过,螺线圈缠绕在骨架上,螺线圈的两端连接控制单元的接线端子上,电池与控制单元通过电源线连接,内检测器输出端经外壁上的通孔连接控制单元脉冲信号输入端。
(2)电磁波探测装置
根据超低频电磁波发射装置发射的超低频电磁波具有的双峰对称规律,设计了十字架结构的电磁波探测装置。

图5 电磁波探测装置结构
如图5所示电磁波探测装置包括有线圈、骨架、天线架、天线盒、数据采集盒、信号输入线、信号输出线。线圈缠绕在骨架上,放置在天线盒里,天线盒通过卡扣的形式安装在天线架上,天线盒上下两端不封闭,天线架成十字状(由横轴与纵轴垂直交叉形成),使用玻璃钢制成,共有五个天线盒,在天线架中央放置一个天线盒(里面放置三号线圈),另外四个安装在天线架四端,数据采集盒放置在天线架四端中的一个天线盒与天线架中央的天线盒之间,线圈通过信号输入线与数据采集盒连接,数据采集盒中包括有超低频电磁波信号采集和数据处理电路。在横轴与纵轴的四个交叉点处各引出一条缆绳,用于固定于海面作业船底部,信号输出线连接到作业船里面的上位机。
利用电磁波探测装置沿着管道方向探测管道上方的电磁信号,对5个天线线圈(包括在横轴两端设置有1号和2号天线线圈,在纵轴两端设置有4号和5号天线线圈,中心设置有3号天线线圈)输出的模拟信号进行信号调理和A/D转换得到电磁波数据,利用快速傅里叶变换(FFT)对这些数据进行频谱分析,提取出30电磁波的幅值,需要向上位机发送,若接收5个天线线圈中任何一个线圈输出的模拟信号值均未超过设定值5(判断是否探测到超低频电磁波发射装置与内检测器的连接体时所需要的设定值,该设计中设定值取值为5mV),则说明没有探测到超低频电磁波发射装置发射的超低频电磁波,继续探测;如果其中任何一个天线线圈输出的模拟信号值超过设定值5,则说明探测到超低频电磁波发射装置发射的超低频电磁波,产生报警提示信息向上位机发送。比较这5个天线线圈输出的30Hz电磁波的幅值大小,1号与2号天线线圈输出的幅值大小相近,并且大于3号线圈输出的幅值,或者4号与5号天线线圈输出的幅值大小相近,并且大于3号线圈输出的幅值,那么超低频接收装置的正下方就是超低频电磁波发射装置,即可精确确定内检测器的位置,产生精确定位信息也发送给上位机。
电磁波探测装置的探测流程如图6所示。
2 实时跟踪与精确定位系统结构设计
管道内检测器实时跟踪与精确定位系统结构分为管道内检测器上的定位装置、管道外实时跟踪模块和管道外精确定位模块这三个部分。管道内检测器的实时跟踪与精确定位系统总体结构图如图7所示。

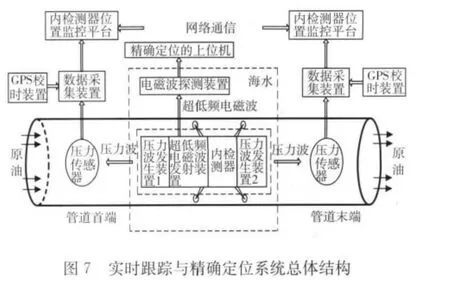
由图7可知管道内检测器的实时跟踪与精确定位系统的硬件装置包括:两个压力波发生装置、压力传感器、数据采集装置、GPS校时装置、内检测器位置监控平台、超低频电磁波发射装置、电磁波探测装置和精确定位部分的上位机。其中,两个压力波发生装置、压力传感器、数据采集装置、GPS校时装置和内检测器位置监控平台用来实现对管道内检测器的实时跟踪;超低频电磁波发射装置、电磁波探测装置和用于定位分析的上位机。
实时跟踪与精确定位系统的硬件连接顺序为:压力波发生装置1——超低频电磁波发射装置——内检测器——压力波发生装置2。
管道首端与末端分别安装有高精度压力传感器。管道首端与末端分别设有数据采集装置,用来采集高精度压力传感器的压力数据和GPS校时装置时间信息,并将采集的压力和时间数据打包后,通过网络传动给相应的内检测器位置监控平台。在监控平台对压力数据和时间信息进行分析处理,实时确定内检测器在管道中的位置,并在位置监控界面上显示。
电磁波探测装置探测超低频电磁波发射装置发射的电磁波,并作数据的处理后传送给上位机,在上位机显示电磁波数值大小,提示是否探测到超低频电磁波发射源,电磁波探测装置和精确定位部分的上位机通过RS-485总线进行通讯。
3 仿真试验
使用OLGA6.0软件对所提出的基于压力波的管道内检测器实时跟踪的方法进行仿真,试验此方法的可行性,在OLGA6.0软件中搭建的管道内检测器的实时跟踪仿真模型如图8所示。

图8 管道内检测器的实时跟踪仿真模型
在图8中,INLET和OUTLET是两个节点(NODE),分别代表管道(PIPELINE)的入口端点和出口端点,SOURCE-1模拟管道首端注入的原油,SOURCE-2模拟产生向管道两端传播的压力波。在本仿真中,由SOURCE-2在第23s时,0.2s时间内向管道内注入0.0113m3原油,注入0.0113m3原油的原因是每个压力波发生装置允许伸缩范围是150mm,管道内径219mm。
OLGA6.0软件将管道分为9段,每一段的长度为5.56km,如图9所示。

图9 管道内检测器的实时跟踪仿真示意图
原油注入管道的一端SOURCE-1,即管道首端设定在1号端点,同时管道首端压力传感器也放置在1号端点,模拟压力波产生的SOURCE-2设定在6号端点,即压力波的波源在6号端点,管道末端压力传感器放置在10号端点。管道内检测器的实时跟踪仿真结果图如图10所示。

图10 管道内检测器的实时跟踪仿真结果
在本仿真中设定SOURCE-2在第23s时产生压力波,从图10中可以看出在第41s时,PIPELINE.PIPE-1.10Pressure曲线,即管道末端压力曲线开始出现SOURCE-2产生的压力波,而PIPELINE.PIPE-1.1Pressure曲线,即管道首端压力曲线在第46s开始出现压力波,两个波峰与波前压力差大约都是10kPa,使用0.05%的高精度压力传感器是完全可以检测出来的。压力波波源(6号端点)与管道首端(1号端点)的距离为27.78km,压力波传播时间为23s,经计算波速为1208m/s,压力波波源与管道末端(10号端点)的距离为22.22km,压力波传播时间为18s,经计算波速为1234m/s,将两波速值取平均值为1222m/s,时间差为5s,管道长度为50km,将这三个数值代入到公式(3),计算得到压力波波源距离管道末端的距离为21.95km,对内检测器定位的绝对误差为270m,绝对误差为0.54%。
通过对所提出的基于压力波的管道内检测器实时跟踪的方法进行仿真,验证了压力波可以传播到管道首端和末端,并且使用现有精度的压力传感器可以检测到压力波。同时也发现对压力波到达时刻的确定存在困难,压力波达到时刻不能精确确定也就影响了对内检测器实时跟踪的精度,因此在内检测器卡堵在管道中时,需要利用上文提到的超低频电磁波来精确定位管道内检测器。
4 结论
基于压力波和电磁波的特点,提出了基于负压波和超低频电磁波的海底管道内检测器实时跟踪与精确定位方法,该方法解决了海底管道内检测器无法实时跟踪定位的国际难题,仿真结果间接证明本方法的有效性。
[1]MENG Q,BISCHOFF R.Odometry based pose determination and errors measurement for a mobile robot with two steerable drive wheels[J].Journal of Intelligent and Robotic Systems:Theory and Applications.2005,41(4):263-282.
[2]YU J,LEE J,PARK G.An off-line navigation of a geometry PIG using a modified nonlinear fixed-interval smoothing filter [J].Control Engineering Practice,2005,13(11):1403-1411.
[3]吴知非,吴敏生.一种可用于管道爬行器的静磁场型定位系统[J].测控技术,2001,20(4):1-5.
[4]姜生元,邓宗全,李斌.内置动力源管内X射线探伤机器人的研制[J].机器人,2001,23(3):211-216.
[5]KAJIWARA G.Improvement to x-ray piping diagnostic system through simulation [J].Journal of Testing and Evaluation.2005,33(5):295-304.
[6]杨理践,尹增亮,高松巍.组合导航系统在管道地理位置测量中的应用[J].沈阳工业大学学报,2006,28(4):414-417.
[7]高松巍,孙小京,杨理践.基于极低频电磁波的管道检测定位技术[J].沈阳工业大学学报,2009,31(3):266-270.
[8]WALTER J.Very-low-frequency electromagnetic field detector with data acquisition[J].IEEE Trans.on Instrumentation and Measurement,2009,58(1):129-140.
[9]惠小强.有限长通电螺线管空间的磁场分布[J].物理与工程,2004,14(2):22-24.
