磁致伸缩导波检测软件开发
2013-10-23袁建鹏武新军
袁建鹏,武新军,徐 江,从 明
(华中科技大学 机械科学与工程学院,武汉 430074)
在桥梁缆索、输油管道等较长构件的无损检测中,常规无损检测方法单次检测范围小,需要移动探头进行逐点检测,检测效率低。基于磁致伸缩效应的导波检测方法可单点激励长距离检测,检测效率高[1-3]。目前商业应用的导波检测系统主要有TWI开发的Teletest、超声导波公司开发的 Wavemaker和美国西南研究院开发的MsSR3030及其配套的检测软件[4-6]。作者在已有的非接触式磁致伸缩导波检测系统硬件基础上[7],根据近年来的实验室和现场试验需求,对其软件进行了升级。软件包括频散曲线、虚拟检测、数据采集、信号分析等多个模块,可实现检测频率选择、传感器布置设计、数据采集显示与存储、结果分析与报告等功能,同时具备采集卡连接状态自动监测、扫频检测等人性化功能。
1 磁致伸缩导波检测系统结构
图1是检测系统硬件结构框图,检测硬件包括便携式计算机、检测主机和传感器。检测主机由数据采集卡、门控电路、功率放大器、放大滤波电路和双工电路组成。传感器为双工传感器,双工传感器包含两个通道的线圈,每个线圈既可作激励也可以作接收。检测时,软件通过采集卡接口函数控制采集卡D/A模块输出一定周期的正弦脉冲,同时I/O模块输出高电平作为门信号,门控电路根据门信号控制功率放大器对正弦脉冲进行功率放大,放大后的信号作用于双工线圈,通过铁磁性材料的磁致伸缩效应在构件中激励出导波。当导波通过线圈时,由于逆磁致伸缩效应导致线圈磁通量变化并感应出电信号。双工线圈的信号经双工电路后进入放大滤波电路。滤波后的信号由A/D模块采集并传输到便携式计算机,通过软件对信号进行显示、存储和分析处理,得到被检构件的缺陷信息。根据检测方向可分为双向检测和单向检测,双向检测时仅对一个线圈进行激励与采集,单向检测时同时对两个线圈进行激励与采集,通过控制两个线圈激励信号的时间和相位实现单方向检测[8]。



图1 检测系统硬件结构框图
2 软件结构与实现
软件使用单文档视图结构作为基本框架,通过自定义的抽屉控件实现参数输入和操作控制,减小操作复杂性并提高人机交互水平。软件主要由六个模块组成,分别为频散曲线、虚拟检测、参数设置、数据采集、信号分析和检测报告模块,软件功能框图如图2所示。频散曲线模块用于圆柱体结构中导波的相速度和群速度计算、显示,计算结果可存储、打开;虚拟检测模块用于检测回波预测和传感器布置优化;参数设置模块用于设置检测过程中的数据显示参数、数据存储参数、检测信息等。数据采集模块用于控制导波信号的激励、采集、显示与存储;信号分析模块用于检测信号的处理与分析;检测报告模块用于根据分析处理结果生成检测报告。软件的主界面如图3所示。下面对各个模块加以详细论述。
2.1 频散曲线模块
导波检测的关键在于频率的选择,而频率选择依据是频散曲线,实际检测中应选择频散现象较小的频率作为检测频率。为此,根据频散方程开发了基于二分法的频散软件。对于给定的圆柱体结构,频率ω和波数k之间满足[9]:

式中:cij表示行列式|cij(ω,k)|n中的第i行,第j列元素,是频率ω和波数k的函数。
求解T模态时n=2,L模态时n=4,F模态时n=6。若频率ω固定,则行列式|cij(ω,k)|是波数k的函数,给定一个初始波数k1和增量Δk,若k1处和k1+Δk处行列式的符号发生改变则意味着Δk内存在一个解,则取Δk的一半进行下一次迭代,直到找到给定精度内的根k0[10]。若波数k固定可用相同的方法迭代求解频率ω。令波数k=0可求解得到截止频率foutoff,对于除 T(0,1)、L(0,1)和 F(1,1)模态外的导波均存在截止频率。输入计算参数和构件参数后,先计算出各个模态的截止频率,对于 T(0,1)、L(0,1)和F(1,1)模态可认为其截止频率为0。接着根据最小计算频率、最大计算频率、频率步进和截止频率得到需要计算的频率数组,根据截止频率可得到频率数组中各个频率对应解的个数N,使用二分法迭代求解每个频率对应的N个解,得到N个模态所对应的波数。算出所有频率下各模态的波数后即可得到频散曲线。求解过程中的贝塞尔函数、贝尔斯托求根函数、高斯消元法求矩阵行列式函数等均通过C++算法实现,通过抽屉控件实现计算参数的输入,计算过程中实时显示计算进度,相速度和群速度曲线通过自定义的二维坐标控件显示,并可在坐标控件上显示曲线所对应的模态名称。频散曲线计算结果可保存到文件,若有相同结构,直接打开频散曲线文件即可。
2.2 虚拟检测模块
虚拟检测主要实现以下两种功能:一是实验室研究时已知缺陷信息,可将实际检测信号与虚拟检测信号进行对比,方便对信号进行分析;二是现场检测时工况复杂干扰信号多,为了提高检测精度对疑似缺陷采用虚拟检测方法以指导传感器布置。虚拟检测方法根据激励位置、接收位置、管长、衰减系数、缺陷反射率、激励方向等参数模拟采集获得脉冲回波信号,同时可根据管长、缺陷位置等参数优化设计激励位置等参数。为了简化算法将回波分类,根据激励方向可分为向左激励、向右激励,根据接收方向可分为左侧信号、右侧信号,根据反射介质可分为缺陷回波、通过信号和端部回波,组合起来共有8种信号。同时对工作方式进行分类,激励方式可分为向左激励、向右激励和双向激励,接收方式可分为接收左侧信号、接收右侧信号和接收双侧信号,组合起来共有9种工作方式。某一工作方式下的虚拟信号是8种信号的线性和,给定采样时间和采样率可求得每一个采样时间点的幅值,最终得到虚拟检测信号。图4是管长5m,激励位置0.3m,接收位置1m,缺陷位置2m,导波群速度5200m/s,衰减系数0.2dB/s,缺陷反射率10%,向左激励,激励频率40kHz,激励周期数3,双侧接收,采集时间4ms,采样率5MHz下的虚拟检测信号。同时,以缺陷信号便于识别为依据,可对传感器布置进行优化设计,优化后的设计数值显示在参数设置区并同时在显示区显示布置示意图。
2.3 参数设置和数据采集模块
参数设置模块主要用于设置信号显示参数、数据存储参数和检测信息参数。

图4 虚拟检测信号
数据采集模块是软件的主要模块,实现导波信号的激励、采集、显示与存储。便携式计算机通过USB2.0接口与主机连接,控制信号和检测数据通过USB2.0接口传输,数据采集卡具有双通道A/D采集和双通道D/A输出功能,最高采样率20MHz,I/O模块包括8路DI和16路DO,DO作为门信号控制接口。采集时首先判断检测参数、采集卡连接状态等是否正常,接着初始化采集卡并进入采集子线程,检测人员选择数据存储路径,设置采集D/A和DO,接着循环执行初始化A/D、采集数据、检测缓冲区是否溢出、停止A/D和发送显示更新消息直到完成所有采集次数,采集完毕后存储检测数据并退出子线程。若采集过程中出现缓冲区溢出则停止采集子线程结束采集。数据采集流程如图5所示。
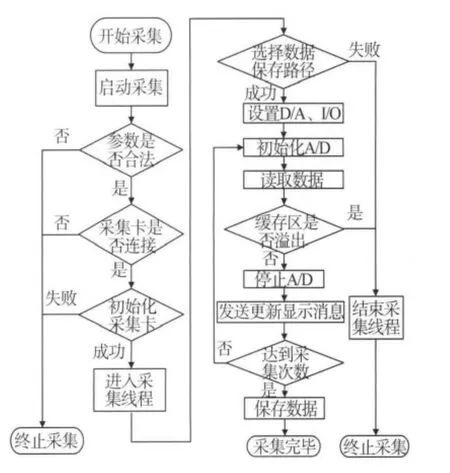
图5 数据采集流程
2.4 信号分析与检测报告模块
信号分析模块进行分析时首先加载数据文件,读取文件头中的参数信息,将其显示在左侧的参数显示区;然后从数据区读取各个通道的数据到内存中;数据读取完毕后显示信号分析主界面,如图6所示。

图6 数据分析主界面
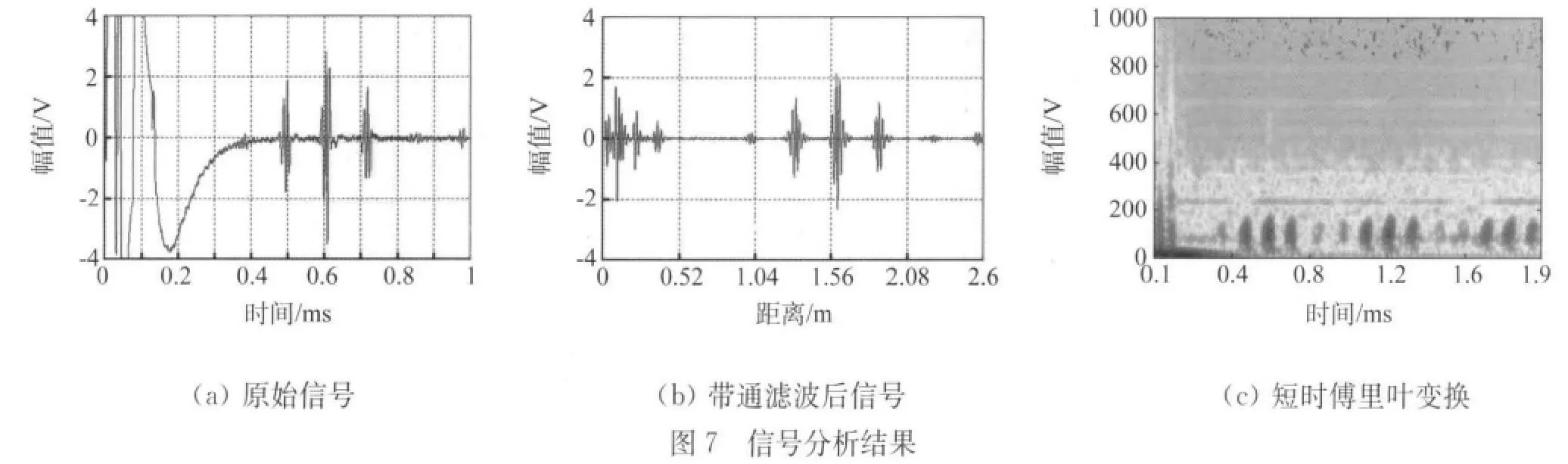
默认显示模式为全屏显示模式,将显示采集时间内的全部信号,调整显示范围滑块可选择要分析的数据区域,单击分析显示可进入分析模式,分析模式下可对信号进行带通滤波、时频分析、包络显示和DAC曲线绘制等,信号显示的横坐标可以设置为距离坐标,方便对信号进行定位,带通滤波器为无限冲击响应滤波器,类型有巴特沃斯、切比雪夫和椭圆滤波器;时频分析主要是对信号进行短时傅里叶变换,得到信号的频率谱,窗函数类型可选择凯撒窗、高斯窗、海明窗、汉宁窗等。信号分析完后可对回波进行标识同时可导出到图片,图7所示是信号分析结果。
检测报告模块用于生成检测报告,包括报告内容、预览和打印3个部分,报告内容用于加载分析结果、检测参数等。报告内容完成后可在显示区进行预览,并通过打印机进行打印。
3 结论
在深入研究磁致伸缩导波检测特点的基础上,基于自主研制的硬件结构,开发了磁致伸缩导波检测软件,该软件具有频散曲线计算、虚拟检测、参数设置与信号采集、检测结果分析等功能,实验室和现场试验表明,检测软件开放性好、运行稳定,将推进导波检测技术的应用。
[1]COBB A C,KWUN H,CASERES L,et al.Torsional guided wave attenuation in piping from coating,temperature,and large-area corrosion[J].NDT & E International,2012,47:163-170.
[2]LIU Zeng-Hua,ZHAO Ji-Chen,WU Bin,et al.Temperature dependence of ultrasonic longitudinal guided wave propagation in long range steel strands[J].Chinese Journal of Mechanical Engineering,2011,24(3):487-494.
[3]XU Jiang,WU Xin-Jun,CHENG Cheng,et,al.A magnetic flux leakage and magnetostrictive guidedwave hybrid transducer for detecting bridge cables[J].Sensors,2012,12(1):518-533.
[4]高俊峰,关卫和,梁春雷,等.长距离超声导波技术及典型模拟缺陷监测[J].压力容器,2009,26(4):5-9.
[5]孙士彬,孙乾耀,DEMMA A,等.采用超声导波技术对埋地管道进行腐蚀缺陷的检测[J].无损探伤,2007,31(4):6-9.
[6]徐书根,王威强,赵培征,等.磁致伸缩导波技术检测管道缺陷[J].无损检测,2008,30(7):434-437.
[7]武新军,徐江,沈功田.非接触式磁致伸缩导波管道无损检测系统的研制[J].无损检测,2010,32(3):166-170.
[8]TANG Huan,XU Jiang,WU Xin-Jun.Research on unidirectional transmitting method for guided wave based on magnetostrictiveeffect[C]//Proceedings of 2010the 3rd International Conference on Computational Intelligence and Industrial Application(Volume 8).Beijing:China Academic Journal Electronic Publishing House,2010:125-128.
[9]GAZIS D C.Three-dimensional investigation of the propagation of waves in hollow circular cylinders.I.Analytical Foundation[J].J.Acoust.Soc.Am,1959,31(5):568-573.
[10]GAZIS D C.Three-dimensional investigation of the propagation of waves in hollow circular cylinders.II.Numerical Results[J].J.Acoust.Soc.Am,1959,31(5):573-578.
