汽车质心侧偏角观测器试验验证
2013-10-20皮大伟张丙军钟国华
皮大伟,张丙军,钟国华,
(1.南京理工大学机械工程学院,江苏南京 210094;2.南京汽车集团有限公司汽车工程研究院,江苏南京 210028)
近年来,随着车辆高速化、智能化的发展趋势,关于车辆主动安全系统的研究愈发受到重视。汽车稳定性控制系统(vehicle stability control,VSC)被越来越多的汽车厂商采纳,用于提高车辆在极限工况下的操纵稳定性能。该系统利用横摆角速度跟踪原理进行反馈控制达到提高车辆稳定性能的目的。但是在低附着系数路面状况下,需要引入车辆质心侧偏角作为控制变量补偿横摆角速度跟踪控制的不足[1-2]。
车辆质心侧偏角可以通过两天线GPS系统或非接触式光学传感器测量得到[3-4]。但是将直接测量的传感器集成到车辆稳定性控制系统中存在成本高、精度以及可靠性不能满足实际应用的问题。因此,基于方向盘转角、侧向加速度、横摆角速度以及轮速传感器等信号来实时估计车辆质心侧偏角,成为汽车稳定性控制系统开发的重要研究内容[5-9]。
目前,质心侧偏角观测主要有4种方法。第1种是利用侧向速度变化率和侧向加速度及其横摆角速度之间的运动学关系,通过积分得到车辆的侧向速度,计算质心侧偏角。该方法由于对传感器信号的噪声同时进行积分运算导致估计结果存在累积误差[5-10]。第2种是利用车辆动力学模型的输入、输出来估计,该方法估计结果的精确性依赖于车辆参数,而车辆的非线性特性严重限制了该方法在非线性段的估计精度[11-12]。第3种是基于神经网络模型的估计方法,该方法利用试验值建立质心侧偏角和横摆角速度以及侧向加速度的映射关系,其估计精度对试验数据具有很强的依赖性[13]。第3种方法是综合第1种和第2种方法的优点,在车辆线性区域,基于模型的估计结果权重比例大;相反,在车辆非线性区域,则提高基于积分的估计结果权重[14-15]。
本研究提出一种基于Kalman滤波的综合估计方法,定义车辆非线性因子,用于判断车辆的非线性状态程度,充分发挥模型法和积分法在不同区域的优点。考虑到GPS系统能实时准确测量车辆的质心侧偏角,搭建基于GPS的车辆质心侧偏角观测器验证系统,通过试验验证所设计观测器的估计精度。结果表明:所设计的方法能满足车辆稳定性系统的设计要求,能较精确地估计出车辆的质心侧偏角。
1 质心侧偏角观测方法
所设计的车辆质心侧偏角观测方法如图1所示。输入变量是侧向加速度、横摆角速度、方向盘转角、车速和轮速。该观测方法分为侧向力计算和基于Kalman滤波的质心侧偏角估计2部分。依据车辆横摆角速度实际值和理想值之间的偏差和侧向加速度定义非线性因子,用于表征车辆的非线性程度。首先,建立侧向力信息融合模型,利用传感器信号计算轮胎侧向力是基于运动学的方法,利用轮胎模型计算轮胎侧向力是基于模型的方法,利用非线性因子作为权重得到在当前车辆状态下用于质心侧偏角估计的轮胎侧向力大小。基于单轨车辆模型和轮胎模型建立Kalman滤波器,将上述计算得到的侧向力和车辆侧向加速度作为反馈变量估算车辆质心侧偏角。考虑到车辆的非线性特性,轮胎模型采用侧偏刚度拟线性模型,其侧偏刚度通过侧偏刚度识别模块依据车辆的非线性因子计算得到。
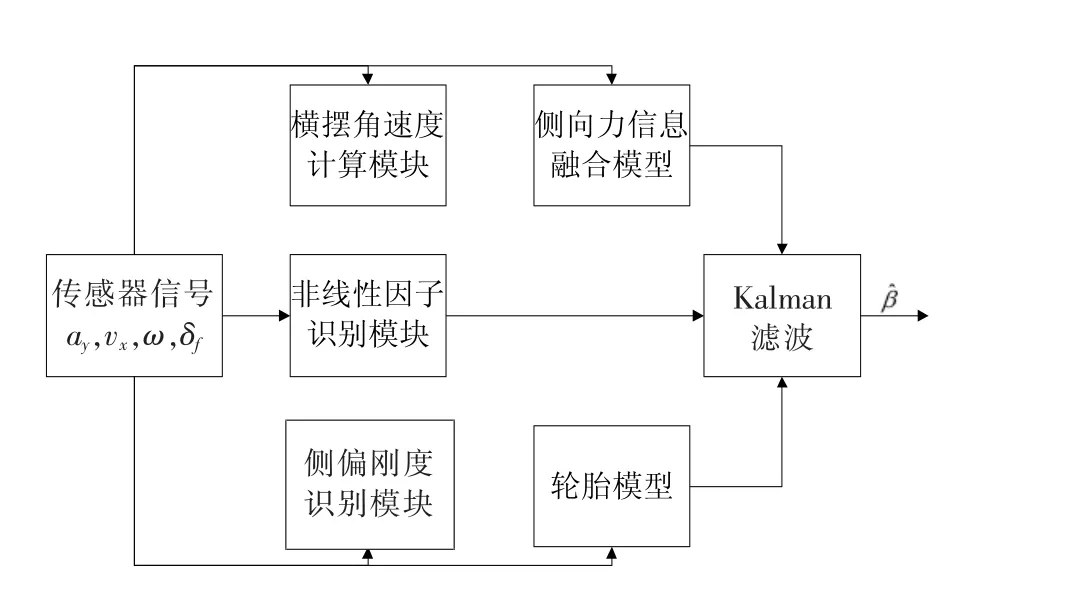
图1 质心侧偏角观测方法Fig.1 Side-slip angle estimation method
1.1 非线性因子识别模块
引入非线性因子α表征车辆状态的非线性程度。考虑到车辆状态的复杂性,利用模糊逻辑识别非线性因子。输入变量为横摆角速度偏差Δr和侧向加速度ay,输出变量为车辆的非线性因子。其隶属度函数如图2所示。
横摆角速度偏差Δr表示为车辆横摆角速度测量值和理想值的偏差转换到角度域的大小,具体可以表示为[7]

横摆角速度理想值可以通过式(2)计算得到:

式中vc为特征速度。
通过大量分析和仿真可知:
1)当Δr很小且ay也很小时,车辆状态处于线性区域,非线性因子即取较小值;
2)当Δr很小且ay很大时,可以认为此时路面附着系数较高,车辆非线性因子主要取决于侧向加速度ay的大小;
3)当Δr很大且ay很小时,可以认为此时路面附着系数较低,车辆非线性因子主要取决于横摆角速度偏差Δr的大小。
因此,制定表1所示的模糊控制规则,设定各条规则的权重为1。采用Mandani推理进行模糊逻辑运算,解模糊方法采用重心法。
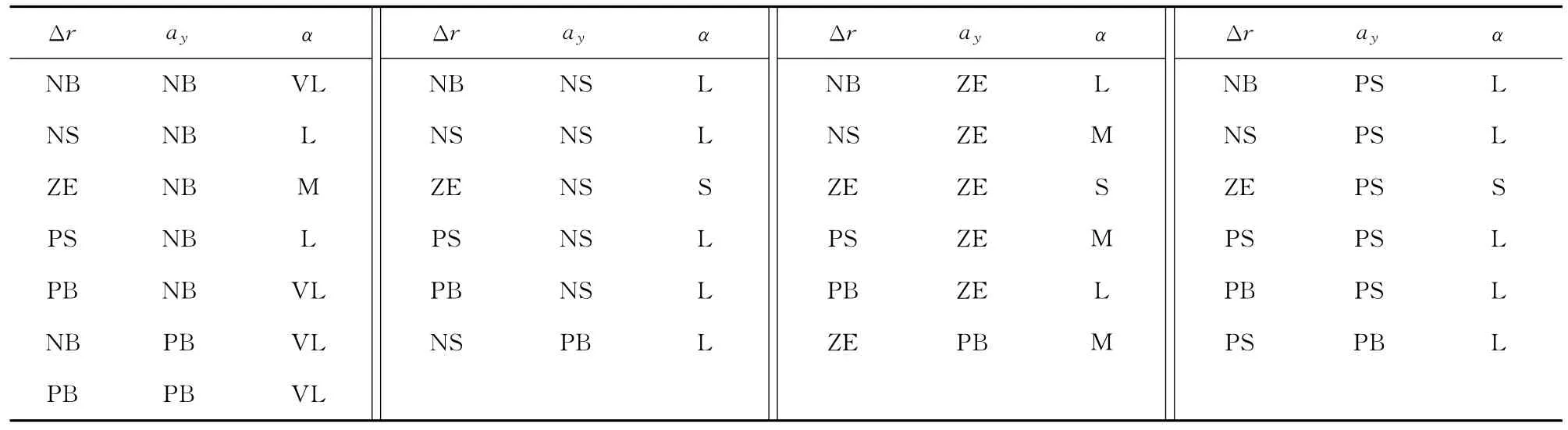
表1 模糊控制规则Tab.1 Rules of fuzzy control
1.2 侧偏刚度识别模块
轮胎侧偏刚度表示车辆前后轴的路面接触性能,可以通过试验测量得到。但是该值受路面附着状况和驾驶工况的影响较大,测量值不可能在各种工况下都能反映当前路面的接触特性。为了在各种工况下都能较准确地反映当前路面的接触特性,本研究引入侧偏刚度识别模块,依据车辆非线性因子调整轮胎侧偏刚度:
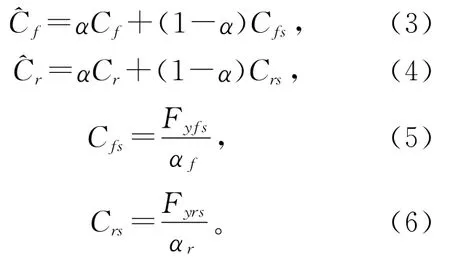
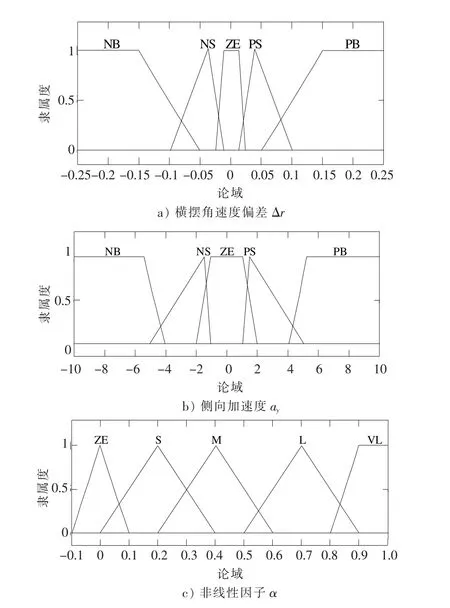
图2 隶属度函数Fig.2 Membership function
式中:Cf,Cr为在高附着系数路面条件下侧偏刚度的测量值;Cfs,Crs为综合传感器信号得到的计算值。
基于单轨模型[15]可以将车辆侧向力表示为横摆角速度和侧向加速度的函数:
1.3 侧向力计算模块
式中:Mz为纵向力产生的横摆力矩。
利用该方法计算侧向力对路面附着状况、车辆操纵特性有很好的鲁棒性,但是传感器信号噪声对计算结果会产生累积误差。因此,该方法适用于车辆的非线性状态区域,此时传感器信号信噪比较大,噪声的影响可以基本忽略。
考虑到侧向力计算在全操纵工况域的精确性,同时引入线性自适应轮胎模型计算轮胎侧向力,其侧偏刚度通过上述侧偏刚度识别模块得到。

车轮侧偏角可以通过横摆角速度和车辆质心侧偏角观测值计算得到:

利用车辆非线性因子作为权重,通过式(13)和式(14)计算出用于估计质心侧偏角的前后轴侧向力:

1.4 扩展Kalman滤波器设计
基于单轨车辆模型和上述线性自适应轮胎模型设计观测器,考虑轮胎力延迟对车辆动力学的影响[13]得到观测器的动力学模型:

其中:
式中:Fyfss,Fyrss为轮胎侧向力的稳态值。
本研究采用上述线性自适应模型计算该稳态值。
将其表述成离散状态空间形式,见式(16)。

其中:

式中:wk为过程噪声;vk为测量噪声。
Kalman滤波算法可以分为预测过程和校正过程2部分。预测过程根据当前时刻的系统状态获得下一时刻的先验估计,校正过程将观测和先验估计相结合获得改进的系统后验估计。
预测过程:

校正过程:

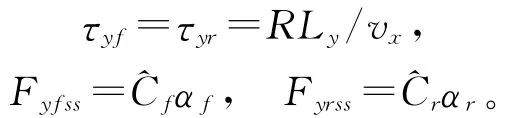
2 试验验证系统
试验验证系统如图3所示,由两天线GPS系统VBOX,MicroAutoBox及便携式计算机和电源等组成。MicroAutoBox系统用于实时数据采集;VBOX是英国Racelogic公司的两天线GPS系统,可以用于测量车身的侧偏角,其采样频率为20Hz。GPS系统的测量结果通过CAN总线以0.5Mbits/s的速度传输到MicroAutoBox中。为了便于比较,利用便携式电脑记录车辆质心侧偏角观测值和GPS系统测试结果。
3 试验结果
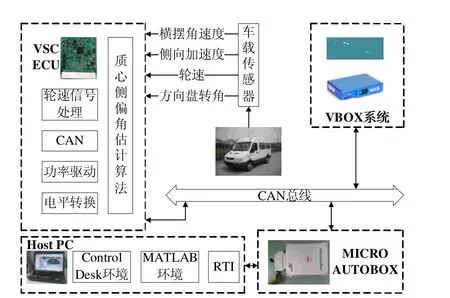
图3 试验验证系统Fig.3 Experimental testing system
如图4所示,某商用车作为试验车辆在高附着系数路面条件下进行标准双移线操纵和蛇形操纵试验,通过比较MicroAutoBox采集的GPS系统和基于车载传感器的估算方法得到的车辆质心侧偏角结果,评价所设计的估计算法的性能。试验场地为干燥、平坦且清洁的混凝土路面。试验车主要搭载传感器如下:轮速传感器、横摆角速度和侧向加速度组合传感器、方向盘转角传感器。
车辆连续转向是车辆操纵稳定性分析中最复杂的工况,因此采用蛇形操纵作为试验工况,其相应的方向盘转角和质心侧偏角如图5所示,车辆的行驶速度保持在11m/s左右。从结果可以看出估计值可以很好地跟踪到测量值,在一定程度上真实反映出车辆的实际状态。但是在方向盘转角较大、侧向加速度变化较为剧烈的时候,从图5可以看出估计值存在一定的波动且和测量值之间存在一定的误差。分析其主要原因为本文建立的估计算法是基于单轨车辆模型的修正算法,其非线性程度相对于实际车辆的强非线性较低,只是对真实车辆非线性的一种简单近似,尚不能完全表征车辆的全部动力学特性。
双移线操纵模拟了车辆超车后迅速返回原车道的行驶过程。图6为双移线操纵的方向盘转角和质心侧偏角,车辆的行驶速度保持在11m/s左右。基于车载传感器的Kalman滤波估算结果在整体趋势上可以很好地与GPS测量结果吻合。和蛇形操纵类似,在转角速度较大、侧向加速度较高时,两者存在一定的偏差(最大偏差为0.27°),该偏差在车辆稳定性控制系统可以接受的范围内。因此,该估计算法精度可以满足稳定性系统的设计要求。

图4 试验车辆Fig.4 Testing vehicle
图5 蛇形操纵试验结果Fig.5 Experimental results of slalom test
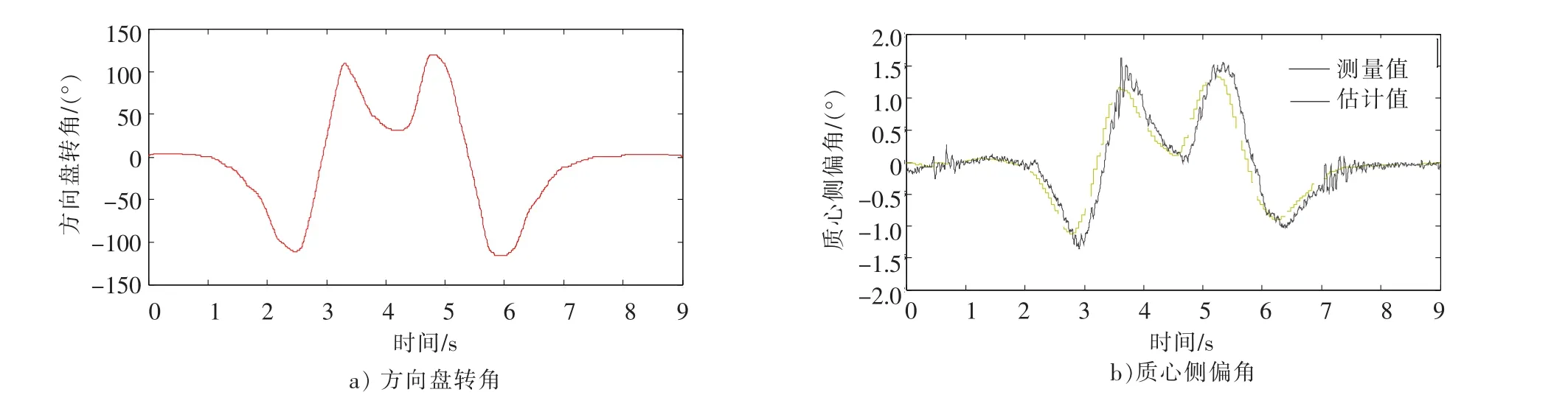
图6 双移线操纵试验结果Fig.6 Experimental results of double lane change
4 结 论
1)应用运动学、动力学方法进行车辆质心侧偏角估算,引入非线性因子及其识别方法,在此基础上提出了一种简化的非线性轮胎力计算方法,基于单轨模型建立Kalman滤波方程,考虑轮胎侧偏刚度补偿下建立车辆质心侧偏角实时估计算法。
2)搭建基于MicroAutoBox,GPS系统和车载传感器的试验验证系统,采用蛇形工况和双移线工况作为试验操纵,在高附着系数的混凝土路面进行实车试验验证估计算法性能。
3)实车试验结果表明,该估计算法在高附着系数路面的各种紧急工况下的估计结果能在一定程度上反映车辆的实际状态,实时性和估计精度均能满足稳定性系统的要求。但是由于场地条件的限制,未能验证所设计的估计算法在低附着系数路面等极限工况下的估计算法的估计精度和实时响应性能。
[1] MAMMAR S,KOENIG D.Vehicle handling improvement by active steering[J].Vehicle System Dynamics,2002,38(1):211-242.
[2] MASATO A,YOSHIO K,KAZUASA S,et al.Side-slip control to stabilize vehicle lateral motion by direct yaw moment[J].JSAE,2001,22(1):413-419.
[3] BEVLY D M,RYH J,GERDES J C.Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip,roll,and tire cornering stiffness[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(4):483-493.
[4] DAILY R,BEVLY D M.The use of GPS for vehicle stability control systems[J].IEEE Transactions on Industrial Electronics,2004,51(2):270-277.
[5] ZANTEN A T,ERHARDT R,PFAFF G.VDC,the Vehicle Dynamics Control System of Bosch[R].Detroit:SAE,1995.
[6] PIYABONGKARN D,RAJAMANI R,GROGG J A,et al.Development and experimental evaluation of a slip angle estimator for vehicle stability control[J].IEEE Transactions on Control Systems Technology,2009,17(1):78-88.
[7] FUKADA Y.Slip-angle estimation for vehicle stability control[J].Vehicle System Dynamics,1999,32(1):375-388.
[8] 张晨晨,夏群生,何 乐.质心侧偏角对车辆稳定性影响的研究[J].汽车工程,2011(4):277-282.
ZHANG Chenchen,XIA Qunsheng,HE Le.Study on the influence of sideslip angle at mass center on vehicle stability[J].Automotive Engineering,2011(4):277-282.
[9] 胡晓清,尚修香.采用双天线GPS/INS系统的汽车侧偏角和轮胎侧偏刚度估测法[J].河北科技大学学报,2011,32(1):92-97.
HU Xiaoqing,SHANG Xiuxiang.Estimation of sidleslip angle and tire cornering stiffness of vehicle with two-antenna GPS/INS measurement system[J].Journal of Hebei University of Science and Technology,2011,32(1):92-97.
[10] CHEN B C,HSIEH F C.Sideslip angle estimation using extended Kalman filter[J].Vehicle System Dynamics,2008,46(sup):353-364.
[11] STEPHANT J,CHARARA A,MEIZEL D.Virtual sensor:Application to vehicle sideslip angle and transversal forces[J].IEEE Transactions on Industrial Electronics,2004,51(2):278-289.
[12] HAC A,SIMPSON M D.Estimation of Vehicle Sideslip Angle and Yawrate[R].Detroit:SAE 2000World Congress,2000.
[13] SASAKI H,NISHIMAKI T.A Side-slip Angle Estimation Using Neural Network for a Wheeled Vehicle[R].Detroit:SAE 2000World Congress,2000.
[14] CHELI F,SABBIONI E,PESCE M,et al.A methodology for vehicle sideslip angle identification:Comparison with experimental data[J].Vehicle System Dynamics,2007,45(6):549-563.
[15] HE Junjie,CROLLA D A,LEVESLEY M C,et al.Coordinaation of active steering,driveline,and braking for integrated vehicle dynamics control[J].Journal of Automobile Engineering,2006,220(1):1 401-1 421.
