重型车辆侧翻预警技术研究现状及发展趋势
2013-10-20赵志国王冬冬
赵志国,王冬冬
(淮阴工学院交通学院,江苏淮安 223001)
2010-2011年,中国重型车辆总销售量突破180万辆,增长速度堪称世界之最。随着国家对基础设施建设投入力度的加大,以及矿山开采规模的不断扩大,重型车辆行驶安全性已成为科研院所和高等院校十分关注的课题。然而,重型车辆由于重心高、装载量大、高宽比相对较大等特点,当车辆遇到极限工况时,如车速过快、转弯半径过小、躲避障碍物等,极易发生侧翻事故。美国高速公路安全局的统计数据表明,在所有交通事故中,汽车侧翻事故的危害程度仅次于汽车碰撞事故,居第2位。根据美国密歇根大学交通研究中心的统计,2002-2006年,美国每年重型车辆的侧翻事故平均有5 200起(平均死亡人数5 300人),每年死于重型车辆侧翻事故的人数逐年递增[1]。中国重型车辆侧翻事故造成的死亡人数是欧美发达国家的4~6倍。可见,重型车辆侧翻是造成生命财产损失的重大交通安全事故,已成为影响交通运输安全的重要问题。因此,深入研究重型车辆侧翻失稳机理,探索适用于重型车辆的有效侧翻预警方法,是实现重型车辆安全、稳定运行的有力保障,同时,为中国重型车辆安全性能核心技术的自主研发提供良好的理论基础,具有重要的理论和实践意义。
1 重型车辆侧翻预警方法
重型车辆侧翻预警方法主要包括基于复杂动力学模型和基于信号的简化预测模型2种方法。采用第1种预警方法,反映车辆实际侧翻过程需要建立复杂动力学模型,其侧翻预警值可达到很高的精度,但由于运算复杂,运算时间较长,受硬件条件的限制,很难保证实时性[2-3];采用第2种预警方法,在车辆行驶的当前瞬间对车辆侧翻状态参数信号进行监测,通过侧翻简化预测模型来计算侧翻预警值,设置预警门限值,可以达到较高的精度[4-5],目前被广泛应用于重型车辆侧翻预警方法中。基于信号的简化预测模型的侧翻预警方法虽然得到了广泛应用,但该预警方法既要求算法简单,又要与整车动态特性具有很好的一致性,才能保证预警的精确度和实时性,但该预警方法很难协调二者的一致性。
2 重型车辆侧翻预警研究现状
2.1 国外研究现状
目前,侧翻预警技术主要基于侧倾角或侧向加速度极限值大于某设定值为侧翻条件。RAKHEJA等于1990年提出了一种侧翻安全预警监测算法,在车辆静态转向条件下,以车轮刚刚离地时的侧向加速度作为临界门限值,超过预设门限值则预警[6]。此后10年,PRESTON,DUNWOODY,DONGYOON等主要围绕横向载荷转移率(LTR)展开车辆侧翻预警方法的研究,以LTR作为判断依据,分析影响LTR值的参数,以此来判断车辆侧翻程度[7-9]。此外,1987年,NALECZ设计一种利用侧翻保护能量装置(RPER),试验表明,该装置能准确地对侧翻工况进行判断和预警[10];1997年,LIU等设计了一套车载侧翻警示装置,基于侧向加速度和侧倾角建立了侧翻失稳RSF评价指标[11]。CHEN等于2001年提出基于TTR侧翻时间预测的侧翻实时预警算法,该算法具有逻辑简单和实用性好的特点[12];EGER等于2003年提出了一种基于时间序列的侧翻预警算法,根据车辆稳定时的边界条件,确定了侧倾角与侧倾角速度之间的数学关系[13];YU于2008年提出一种基于实时TTR矩阵的侧翻预警算法,并使用卡尔曼滤波技术提高TTR矩阵的精度[14]。
2.2 中国研究现状
中国的车辆侧翻预警研究起步较晚,贵州工业大学、南京航空航天大学、吉林大学、重庆交通大学、淮阴工学院等高校开展了一系列相关研究,取得了一定的研究成果。
2004年,贵州工业大学的何锋等对重型车辆侧翻预警及侧翻稳定性进行了研究,建立了静态侧翻模型,并对侧翻阈值进行了计算[15];2007年,南京航空航天大学的张先奎提出了一种基于姿态监测的侧翻预警及控制方法,基于TTR和双飞轮,建立了侧翻预警模型和侧翻控制模型,试验表明,该方法能够对车辆侧翻进行有效控制[16];2008年,吉林大学的朱天军等基于回路传输恢复技术提出了一种LQG主动侧倾控制算法,仿真实验表明,该控制算法能有效提高重型车辆的侧翻稳定性[17];2008年,吉林大学的宗长富等在文献[17]的基础上,基于全局增度控制方法,设计了全状态反馈控制器,仿真实验表明,该方法具有较好的鲁棒性,能有效提高重型车辆侧翻稳定性[18];2010年,重庆交通大学的连金江在TTR预警算法的基础上,提出了一种基于TTR的混凝土搅拌运输车侧翻预警算法,仿真实验表明,该方法能够提前预测搅拌车侧翻情况[19];2010年,淮阴工学院的夏晶晶等提出一种基于模型预测的侧翻主动控制方法,仿真实验表明,该方法能够提高车辆的侧翻稳定性[20]。2011年,吉林大学的朱天军等提出了一种基于改进TTR和卡尔曼滤波技术的侧翻预警方法,试验结果表明,该方法能够实时预警[21];2012年,南京航空航天大学的金智林等以运动型汽车为研究对象,基于动态稳定因子提出了车辆侧翻预警方法,实验表明,该算法能够精确地判别车辆侧翻状况[22]。
3 重型车辆传统侧翻预警原理及存在的问题
3.1 传统侧翻预警原理
车辆侧翻预警系统利用车载传感器获得车辆状态参数(方向盘转角、侧向加速度、车速),传感器信号经过处理后,传递给控制器,根据整车预警模型和预警算法,判断侧翻危险状态。若计算出的门限值大于设定值,报警系统给出预警信号,驾驶员根据预警信号采取相应的防侧翻措施。图1为车辆侧翻预警系统原理图。
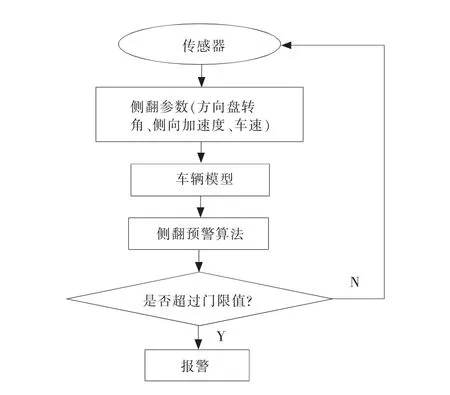
图1 车辆侧翻预警系统原理Fig.1 Theory of vehicle side tumbling pre-warning system
3.2 存在问题
尽管国内外学者在车辆侧翻预警模型与算法方面已经做了不少研究,但从提高侧翻预警精确性和实时性来看,仍有大量工作需要进一步探索与研究。
1)传统的车辆侧翻预警算法多数属于静态预警技术,预警模型的实时性与预警精确性之间存在矛盾,不能动态精确预测侧翻程度。
2)传统预警算法没有考虑车辆载荷和重心位置等状态参数对预警门限值的影响,当车辆状态参数变化较大时,预警门限值会随之改变,如何解决由此带来的预警可信度下降问题是重型车辆侧翻预警的难点问题之一。
3)交通系统是一个典型的复杂系统,在“人-车-路”的道路交通系统中,车辆侧翻事故是多因素共同耦合的结果,传统侧翻模型只考虑了驾驶员行为和车辆状态参数对侧翻的影响,而忽略了道路条件。因此,车路协同下,将“人-车-路”作为一个系统,建立车路耦合侧翻模型与算法是重型车辆侧翻预警的另一难点问题。
4 重型车辆侧翻预警技术发展趋势及关键技术
4.1 基于隐马尔可夫理论的重型车辆侧翻预警技术研究
隐马尔可夫模型(hidden markov model,HMM)是一种基于概率随机过程的模型,该模型具有严谨的数学结构和可靠的计算性能,由于马尔可夫链可以用来隐藏随机观察序列中的时变特性,使其在处理非平稳随机序列中具有独特优势[23],现已成为智能交通领域的研究热点[24],势必在重型车辆侧翻预警方法中发挥优势。
隐马尔可夫理论已在智能交通领域取得了成功的应用[25-29],考虑到隐马尔可夫模型具有可靠的计算性能和时变特性,将其应用到重型车辆侧翻预警中,具有创新性和可行性,其技术路线如图2所示。其关键技术有以下几点:1)建立AR-HMM的侧翻预警模型与算法,解决重型车辆侧翻预警实时性和精确性不能兼顾的问题;2)解决隐马尔可夫理论与侧翻预警研究的关联性理论,隐马尔可夫模型主要描述一个含有隐含未知参数的马尔可夫过程的统计模型,属于随机过程的研究范畴。需要进一步确定侧翻预警中的隐含未知参数,以及这些隐含未知参数如何影响侧翻过程。
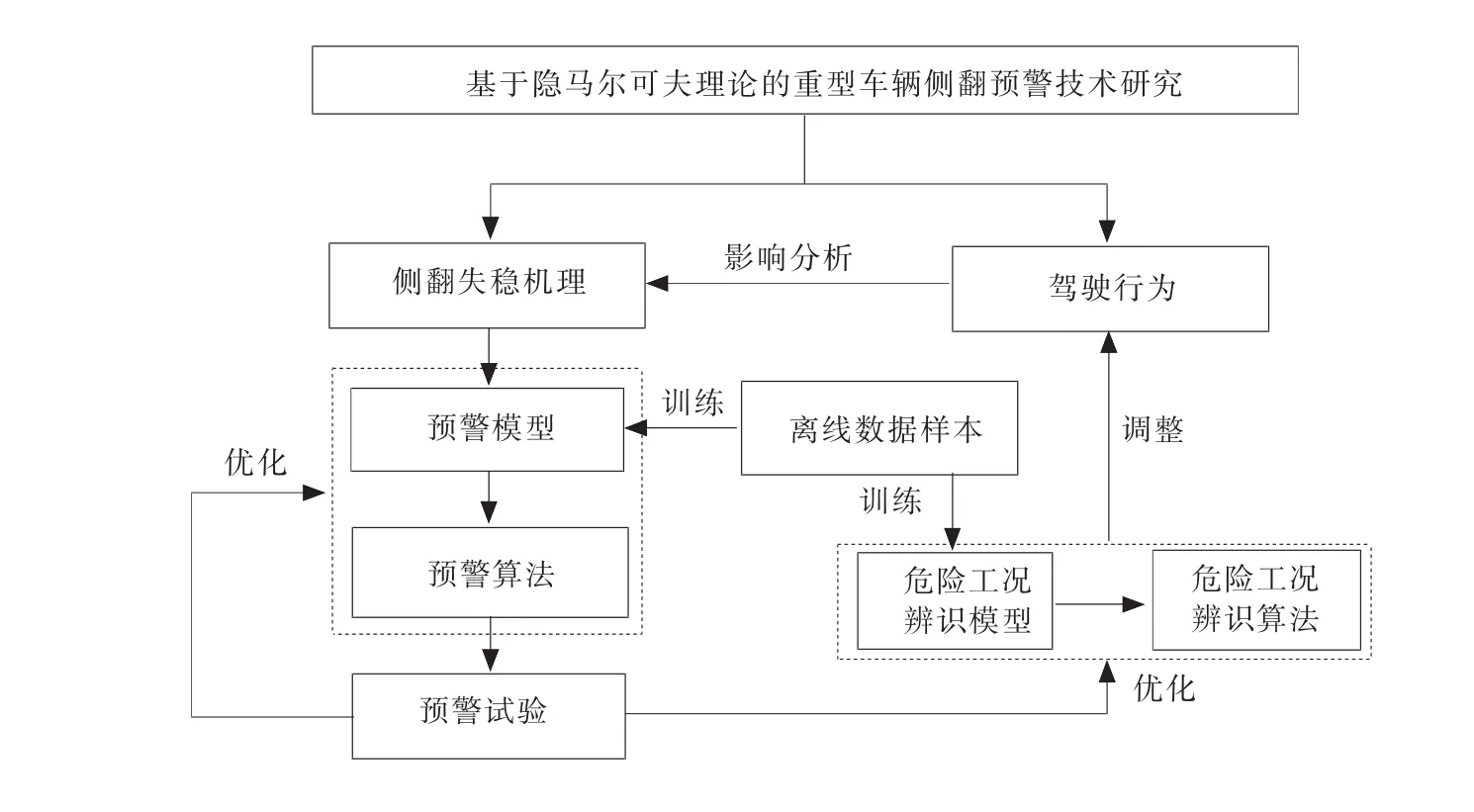
图2 技术路线Fig.2 Technique route
4.2 基于车路协同的重型车辆侧翻预警技术研究
交通系统是一个典型的复杂系统,在“人-车-路”的道路交通系统中,人的因素是道路交通事故的主要致因。车辆转弯时,车速通常由驾驶员按照经验进行控制,进入陌生的道路时,由于驾驶员对道路信息不熟悉,如车速控制不得当,较易造成车辆侧翻事故。因此,车辆与环境信息的交互非常重要。作为智能交通的重要组成部分,车路协同对提高车辆行驶安全性,实现交通系统的可持续性发展具有十分重要的意义。
车路协同技术已经成为当今国际智能交通领域的前沿技术和研究热点,欧美等发达国家都在积极推进相关技术的研究[30-32]。车路协同是指基于无线通信、传感探测等技术进行车路信息获取,通过车-车,车-路信息交互和共享,实现车辆和基础设施之间智能协同与配合,达到优化资源,提高道路交通安全水平的目的。
车路协同下车辆侧翻预警技术方案在于:通过安装在路侧的射频设备播发道路信息,通过安装在车内的车载单元获取路侧射频设备播发的信息,同时通过车载单元获取车辆自身信息及车辆的实时速度信息,经过计算后获得转向速度限制,与实时车速进行比较,向驾驶员报警。如图3所示,该系统主要有信息写入、信息播发、信息获取、计算、速度比较、判断及预警等部分组成。其关键技术在于以下几点:1)根据已知的车辆自身信息和道路信息,车辆安全转向的速度限值确定方法;2)由于车辆的重心高度、车辆外形尺寸、道路宽度以及轮胎等因素对转向速度有影响,因此需要确定车辆影响系数。
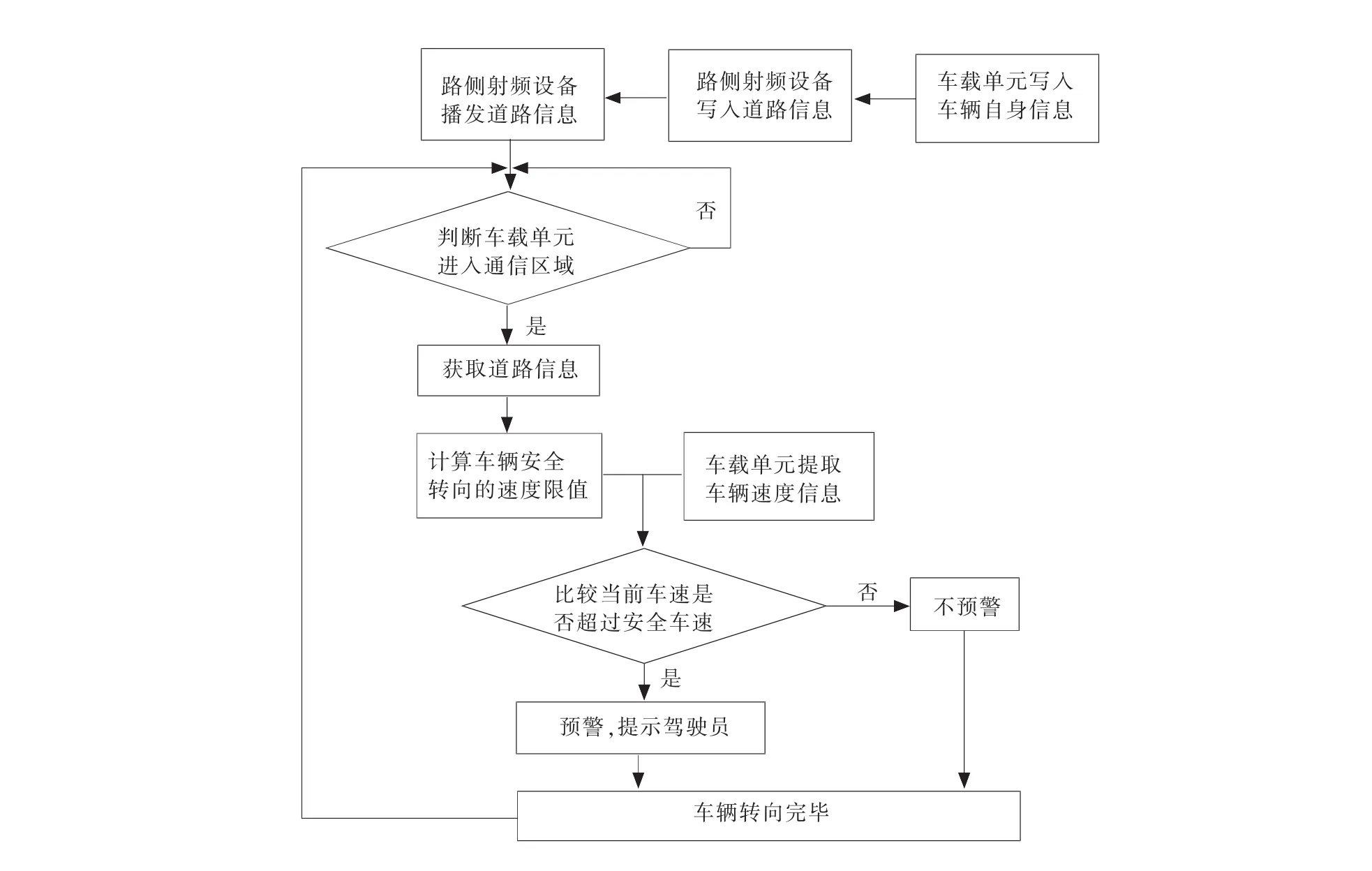
图3 车路协同下车辆侧翻预警技术方案Fig.3 Technique scheme of vehicle side tumbling pre-warning under vehicle-road collaborative
5 结 语
重型车辆侧翻已成为影响道路交通安全的重要问题,对国民经济发展和人民生命财产造成了重大损失。因此,开展重型车辆侧翻预警新技术研究,进一步拓展传统车辆侧翻预警模型与算法的研究内容,为侧翻预警和防侧翻控制等问题提供新思路和通用策略,为中国重型车辆主动安全产品的自主研发提供良好的理论基础,对提高车辆行驶的主动安全性具有重要的意义。
[1] LINDA J,ANNE M,JOHN W.Trucks Involved in Fatal Accidents Fact Book 2006[R].Ann Arbor:The University of Michigan Transportation Research Institute,2008.
[2] GILLESPIE T D,SAYERS M W.A Multi-body Approach with Graphical User Interface for Simulating Truck Dynamic[Z].Michigan:SAE,1999.
[3] GERTSCH J,EICHELHARD O.Simulation of Dynamic Rollover Threshold for Heavy Trucks[Z].Michigan:SAE,2003.
[4] CHEN B C.Rollover warning for articulated heavy vehicles based on a time-to-rollover metric[J].Journal of Dynamic Systems,Measurement and Control,2005,127(3):406-414.
[5] ERIK D,ANNIKA S.The dynamic rollover threshold of commercial vehicles-a sensitivity study[J].International Journal of Vehicle
Design,2006,40(13):228-250.
[6] RAKHEJA S,PICHE A.Development of Directional Stability Criteria for an Early Warning Safety Device[Z].Michigan:SAE,1990.
[7] PRESTON T J,WOODROOFFE J H F.A Feasibility Study of a Rollover Warning Device for Heavy Trucks[R].Canada:Transport Canada Publication,1990.
[8] DUNWOODY A B,STERN D S.System and Method for the Detection of Vehicle Rollover Conditions[Z].New York:CA ,1998.
[9] DONGYOON H,REZA L.Modeling to predict rollover threat of tractor-semitrailers[J].Vehicle System Dynamics,2003,39(6):401-414.
[10] NALECZ A G.An Investigation into Dynamic Measures of Vehicle Rollover Propensity[Z].Michigan:SAE,1993.
[11] LIU P J,RAKHEJA S,AHMED A K W.Detection of Dynamic Roll Instability of Heavy Vehicles for Open-Loop Rollover Control[Z].Michigan:SAE.
[12] CHEN B,PENG H.Differential-braking-based rollover prevention for sport utility vehicles with human-in-the-loop evaluations[J].Vehicle System Dynamics,2001,36(4/5):359-389.
[13] EGER R,KIENCKE U.Modeling of rollover sequences[J].Control Engineering Practice,2003,11(2):209-216.
[14] YU H.Heavy duty vehicle rollover detection and active roll control[J].Vehicle System Dynamics,2008,46(6):451-470.
[15] 何 锋,杨利勇.非满载罐式汽车准静态侧翻阈值的计算与分析[J].贵州师范大学学报(自然科学版),2004,22(2):73-76.
HE Feng,YANG Liyong.Estimation and analysis of the quasi-static rollover threshold for partially filled tank vehicles[J].Journal of Guizhou Normal University(Natural Science),2004,22(2):73-76.
[16] 张先奎.基于姿态监测的汽车侧翻预警及控制研究[D].南京:南京航空航天大学,2007.
ZHANG Xiankui.Vehicle Rollover Warning and Control Based on Rollover Position Monitor[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007.
[17] 朱天军,宗长富,郑宏宇,等.基于LQG/LTR的重型半挂车主动侧倾控制仿真分析[J].系统仿真学报,2008,20(2):476-479.
ZHU Tianjun,ZONG Changfu,ZHENG Hongyu,et al.Active roll control simulation and analysis of heavy tractor semi-trailer based on LQG/LTR[J].Journal of System Simulation,2008,20(2):476-479.
[18] 宗长富,朱天军,麦 莉,等.基于全局增益调度控制的重型半挂车主动侧倾控制算法[J].机械工程学报,2008,44(10):138-144.
ZONG Changfu,ZHU Tianjun,MAI Li,et al.Active roll control algorithm of heavy tractor semi-trailer based on global gain scheduling control[J].Chinese Journal of Mechanical Engineering,2008,44(10):138-144.
[19] 连金江.混凝土搅拌模型车防侧翻预警控制系统硬件设计及软件开发[D].重庆:重庆交通大学,2010.
LIAN Jinjiang.Hardware Design and Software Development on the Anti-rollover Control and the Early Warning System of the Concrete Mixer Model Truck[D].Chongqing:Chongqing Jiaotong University,2010.
[20] 夏晶晶,常 绿,胡晓明,等.基于模型预测的重型车辆侧翻主动控制[J].农业工程学报,2010,26(9):176-180.
XIA Jingjing,CHANG Lü,HU Xiaoming,et al.Active control on the side tumbling of heavy vehicle based on model forecast[J].Transactions of the Chinese Society of Agricultural Engineering,2010,26(9):176-180.
[21] 朱天军,宗长富,吴炳胜,等.基于改进TTR算法的重型车辆侧翻预警系统[J].机械工程学报,2011,47(10):88-94.
ZHU Tianjun,ZONG Changfu,WU Bingsheng,et al.Rollover warning system of heavy duty vehicle based on improved TTR algorithm[J].Journal of Mechanical Engineering,2011,47(10):88-94.
[22] 金智林,张鸿生,马翠贞.运动型多功能汽车动态侧翻预警系统研究[J].传感器与微系统,2012,31(9):32-35.
JIN Zhilin,ZHANG Hongsheng,MA Cuizhen.Research on dynamic rollover warning system for SUV[J].Transducer and Microsystem Technologies,2012,31(9):32-35.
[23] 柳新民,刘冠军,邱 静.基于HMM-SVM的故障诊断模型及应用[J].仪器仪表学报,2006,27(1):45-48.
LIU Xinmin,LIU Guanjun,QIU Jing.Hybrid HMM-SVM approach for fault diagnosis[J].Chinese Journal of Scientific Instrument,2006,27(1):45-48.
[24] 赵志国.隐 Markov模型及在智能交通领域中的应用[J].交通科技与经济,2012,14(1):120-122.
ZHAO Zhiguo.The Hidden Markov Model and its application in intelligent transportation field[J].Technology &Economy in Areas of Communications,2012,14(1):120-122.
[25] OLIVER N.Graphical models for driver behavior recognition in a Smart Car[A].Intelligent Vehicles Symposium,2000.IV 2000Proceedings of the IEEE[C].Pentland:AP,2000.7-12.
[26] YIN Ming,ZHANG Hao,MENG Huadong,et al.An HMM-based algorithm for vehicle detection in congested traffic situations[A].Intelligent Transportation Systems Conference,2007.ITSC 2007.IEEE[C].[S.l.]:[s.n.],2007.736-741.
[27] 何 毅,杨 新.基于隐马尔科夫度量场模型的车辆检测和跟踪[J].上海交通大学学报,2008,42(2):270-273.
HE Yi,YANG Xin.Detection and tracking of vehicles based on Hidden Markov measure field model[J].Journal of Shanghai Jiaotong University,2008,42(2):270-273.
[28] 吕 岸,胡振程.基于高斯混合隐马尔可夫模型的高速公路超车行为辨识与分析[J].汽车工程,2010,32(7):630-633.
LYU An,HU Zhencheng.Recognition and analysis on highway overtaking behavior based on gaussian Mixture-Hidden Markov model[J].Automotive Engineering,2010,32(7):630-633.
[29] 宗长富,王 畅,何 磊,等.基于双层隐式马尔可夫模型的驾驶意图辨识[J].汽车工程,2011,33(8):701-706.
ZONG Changfu,WANG Chang,HE Lei,et al.Driving intention recognition based on double-layer HMM[J].Automotive Engineering,2011,33(8):701-706.
[30] SHLADOVER S E.Progressive deployment steps leading toward an automated highway system[J].Transportation Research Board,2000,1 727:154-161.
[31] BISHOP R.Intelligent vehicle applications worldwide[J].Intelligent Systems and their Applications,IEEE,2000,15(1):78-81.
[32] 王云鹏,易振国,夏海英,等.基于流行病模型的车路协同预警信息交互方法[J].北京航空航天大学学报,2011,37(5):515-518.
WANG Yunpeng,YI Zhenguo,XIA Haiying,et al.Cooperative traffic alarming method based on epidemic model[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(5):515-518.
