“小步、高频”竞走技法及相关的力学规律
2013-10-19董俊道
董俊道
(哈尔滨理工大学应用科学学院,黑龙江 哈尔滨 150080)
竞走运动曾是我国的优势项目,但2000年以后随着“小步、高频”竞走技法的推广,我国的竞走运动逐渐变成潜优势项目。虽经努力,第28届、第29届奥运会上都未能取得好成绩。数据表明(数据采集时间2008年金隅国际田径联合会竞走挑战赛中我国前8名运动员录像解析;问卷调查时间2008-03-13—2008-03-20,河南郑州),我国优秀男女竞走运动员多已采用“小步,高频”竞走技法[1];数据表明(数据采集时间:2009年无锡国际田联竞走挑战赛男女20 km竞走比赛前6名运动员现场三维拍摄),2009年我国优秀男女竞走运动员开始纠正“小步,高频”竞走技法,回归脚掌着地竞走技法。[2]“对于那些已经开展多年的项目来说,之所以再重新回归到训练的‘起点’,反映出对项目本身的特征缺乏深入的了解,对项目的本质没有形成正确的认识,需要在观念和认识上进行深刻的反思”[3]。
1 两种竞走技法的简述
1.1 脚掌着地式竞走技法
脚掌扒地式竞走技法是没发现竞走运动有腾空阶段以前就存在的一种技法,它的特点是着地瞬间脚部肌肉放松,脚跟迅速滚动着地,随后脚掌着地,最后脚掌扒地、蹬伸。着地瞬间虽然也偏于外缘,但不是刻意追求的。且由于着地过程中脚部肌肉放松,可实现脚掌着地。其中扒地是支撑腿积极后摆时与地面相互作用的感觉。发现存在腾空阶段并出台新规定后我国的男竞走运动员在很长的一段时间里还采用这种技法。这期间,外国运动员优化了脚掌着地竞走技法[4]。
1.2 脚踵滚动着地技法或称“小步、高频”竞走技法
这是刻意用脚部的外缘着地脚背侧弓滚动的竞走技法。启用竞走的新规定后,我国优秀女竞走运动员首先在教练指导下采用了这种技法,并一度取得可喜的成果[4]。在以后的几年里,随着外国人对竞走运动研究的逐步深入和我国对“小步,高频”竞走技法的逐步推广,我国竞走运动逐渐变成潜优势项目[1,5-8]。
1.3 两种技法的相同之处
两种技法都要求滚动着地、摆髋、扭髋、腿脚蹬伸等;两种技法的腾空时间要求相同,支撑腿着地至竖直态时必须伸直等;判罚的条件相同。
1.4 两种技法的主要差异
采用足踵滚动技法着地瞬间脚掌仰角小,普遍低于20度,较采用脚掌着地技法小10度多[1];采用足踵滚动技法髋关节向前送的幅度小;采用足踵滚动技法身体重心高度的波动大,直接观察到的是头顶的波动幅度大[1];采用足踵滚动技法着地后躯干的仰角小[1];采用足踵滚动技法两腿的夹角小。脚掌着地竞走技法的两腿夹角大,说明其蹬伸充分,有助于提高速度和步长[1]。
1.5 差异的成因
1.5.1 采用足踵滚动技法着地瞬间脚掌仰角小的原因
采用脚踵着地滚动技法时,必须保持脚踝相关肌肉的紧张、保证脚背的侧弓状态,否则着地时脚踝必然受伤。但保持脚部肌肉紧张、脚背侧弓时,脚尖勾的角度至多接近20度;而用脚掌着地技法时由于脚部肌肉放松,脚尖勾的角度为30度左右,使得脚跟着地瞬间脚掌的仰角为30度左右。脚部着地后由于脚跟的迅速滚动,使得着地后躯干对地面产生了较大的仰角。
1.5.2 采用足踵滚动技法滚动时送髋角度小的原因
“我国优秀女子竞走运动员髋关节最大内旋角左髋平均值15.8°,右髋平均值 16.8°,与世界平均为25°~30°的最大内旋角相比差距明显[1]。其原因是送髋的力矩小,也导致我国竞走运动员腿的摆幅小。用脚踵滚动技法时,脚掌的操控能力差,无法实现有力地送髋、蹬伸。
1.5.3 采用足踵滚动技法时重心高度波动大的原因
用台灯将自己的身影投射到墙上,你用脚踵着地支撑,当你突然改为脚掌着地时,会发现你的影子降低了。当脚踵向前滚动时影子高度会增加得更多些。
亲自体验也是判断的好方法。如:笔者在文献中一再看到我国竞走运动员竞走脚掌着地瞬间脚掌仰角小时[1,6-7]。为什么一再提醒竞走运动员怎么就是不改呢?我用1.5.1中的方法亲自体验后立刻就理解了。
“小步、高频”竞走技法操控性差,蹬伸也乏力,很难与时俱进,在近些年的竞技中显露出多方面的差距[1,5-8],竟能在全国范围内推广、延续,其中的缘由是多方面的。如:我国是最早来用腾空模糊时限理论的国家之一,这是竞争中充分采用规则的指导思想,这种做法也一度起了积极作用。这种作用与“小步、高频”竞走技法是两码事。又如:规则本身在发展、权威的影响,等等。本文只从力学角度进行较深入的探索、分析。
2 “小步、高频”的理论依据
研究竞走运动初期笔者向体育老师请教竞走技法时,老师们都强调,要足踵着地滚动以减小摩擦。《竞走技术标准》中有较完整的叙述:1.……利用人眼模糊观察时限50~70 ms,把腾空时间加长到50~70 ms,这对增大步长或加快步频均为有利;2.……“竞走的定义”要求竞走技术做到前腿着地到垂直部位膝关节必须伸直。因此,前腿“扒地式”全脚着地技术必须改变为“滚动式”足踵着地技术。这种竞走着地技术动作将对增快步频和减小制动作用力产生不利的消极影响……。紧接下来的“竞走技术要点”中再次强调:采用足踵“滚动式”着地,尽量减小着地时的制动作用,充分利用直腿足踵着地来增加步长。[4]
这里把全脚着地技术称为“扒地式”,把脚踵着地叫“滚动式”。并认为足踵“滚动式”竞走能减小制动作用,能减小能耗,能增快步频,增加步长。
针对这些看法可以先提出一些问题研讨。如:1)竞走中脚掌着地不是滚动吗?脚踵着地才是滚动?2)“滚动式”足踵着地竞走技术能减小制动力吗?能减小能耗吗?3)竞走中“步幅与步频”间到底有什么样的确切关系?4)都想用适度地增大腾空时间来增大步长,相比之下,为什么“小步,高频”竞走技法在追求增大步长方面乏力?
其中的2)问本可以通过实验检测,但事实上没有这样做。其中的“小步”表明对步长小早有感知,但由于坚信脚踵滚动能减小制动力而能带来积极地影响,而坚持了这一技法。
“小步、高频”技法理论依据涉及的主要观点都是力学方面的问题,不是简单的技巧问题。下面分别分层次探究。
3 滚动摩擦的特点
物理学中确实提出过“滚动摩擦可以减小摩擦阻力”。其完整的说法:“用滚动摩擦代替滑动摩擦时可以减小摩擦阻力,从而减小物体运动中的能耗”。如:人们搬运巨大的石块时,底下垫上一排圆木,用滚动摩擦代替滑动摩擦,搬运中减小了摩擦阻力和能耗。
3.1 滑动摩擦与滚动摩擦
两相互接触的物体,接触面间有相互作用的压力,且两接触面相对运动时沿两接触面产生的,阻碍两物体相对运动的力称为滑动摩擦力。这时两个接触面上没有相对静止的点、线、面。刚性的正圆柱体沿很硬的水平地面滚动时,正圆柱体与水平地面的接触部位为与圆柱体平行的直线。该直线的上部与圆柱体上的一条直线对应,其下部与地面上的一条直线对应,二直线接触瞬间保持相对静止,而地面上与圆柱体上保持相对静止的直线与圆柱体同步前进。圆柱体沿平面滚动时由于圆柱体及地面的形变使得接触处产生阻碍相对运动的阻力,这种滚动摩擦力与同等压力条件下的滑动摩擦力比较起来要小得多。拖拉机的履带在地面上的运动也是滚动。拖拉机相对地面运动过程中,接触地面的履带与地面保持相对静止,而地面上与拖拉机履带保持相对静止的面不断地向前运动。产生滚动摩擦时,相互接触的物体间有相对运动,二物体的接触处有相对静止的点、线、面,且地面上与滚动前进的物体上保持相对静止的点、线、面不断地向前运动,这些是滚动摩擦的突出特点。
3.2 竞走中脚掌着地的运动过程也是滚动
善走善跳的运动员都有很大的脚弓。这样的脚着地时,着地之初脚跟滚动,后期脚跟抬起后脚掌相对地面滚动。采用脚掌着地技法竞走时,脚跟、脚掌同时着地的时段里脚部做什么样的运动呢?
从侧面观察竞走运动。竞走中前脚跟着地滚动后很快转为脚跟、脚掌着地。起初的某一时刻,见图1。脚跟Q处受到的支撑力为N1Q,受到的摩擦力为f1Q;脚掌H处受到的支撑力为N1H,受到的摩擦力为f1H。该瞬间脚部相当于受到竖直方向的合支撑力N1(=N1H+N1Q)和合摩擦力f1(=f1Q+f1H)的作用,该二力合力的作用点相当于作用在A1点,在对应时刻,由于Q、H与地面保持相对静止,对应的合力F1作用点A1与地面也保持相对静止,且随着运动员质心的前移而前移。在稍后的瞬间,运动员脚跟受到的支撑力变为N2Q,受到的摩擦力为f2Q;脚掌受到的支撑力为N2H,受到的摩擦力为f2H;此瞬间脚掌相当于受到竖直方向的合支撑力N2和合摩擦力f2的作用,该二力合力F2的作用点相当于作用在A2点。该合力作用点在对应时刻与地面相对静止,且随着运动员质心前进而前进,见图2。当过运动员质心的竖直线刚好通过支点A3,这时脚部受到的前进方向的合摩擦力为零,竖直方向脚部相当于受到合力N3作用,该合力的作用点在对应时刻与地面相对静止且随质心的前进而前移,见图3。稍后瞬间,由于运动员的质心继续前移,运动员脚跟受到的支撑力变为N4Q,受到的摩擦力变为f4Q;此瞬间脚掌相当于受到合摩擦力f4和竖直方向的合支撑力N4的作用,该二力的合力F4的作用点相当于作用在A4点,它在对应时刻与地面保持相对静止,且随质心的前进而前移。见图4。脚跟刚要离地瞬间,脚跟处受的支撑力减小至零,脚部受到的支撑力移至脚掌处,随着以后脚掌的蹬伸,支撑点继续前移。即从力学角度看,竞走中即使是脚跟与脚掌同时着地的时段里,也可看成是脚上有一个合力作用点与地面保持相对静止,且该点随着质心的前移而前移。即脚弓大的运动员用脚掌着地技法竞走时,亦可看成是脚部在滚动前进。
竞走中,不论是用脚踵着地技法还是用脚掌着地技法,都要求有足够的摩擦而不发生滑动。脚部相对地面的运动都可看成是滚动,根本谈不上用滚动摩擦代替滑动摩擦而减小摩擦阻力,只不过看起来脚踵着地时其外缘似乎呈圆形罢了。着地过程的能耗主要由着地前后质心的速度决定;着地时的制动作用主要由着地过程的长短决定。
3.3 对竞走的动力学分析适用于两种竞走技法
用图1—图4说明用脚掌着地技法竞走时,脚与地面的相互作用形式为滚动摩擦。因为这种情况下理论上可视脚部受到的总合力的作用点与地面接触瞬间与地面保持相对静止,且合力作用点随运动员质心的前进而前进。实际上脚踵滚动时脚与地面的接触也为面接触,用力学方法分析时也要关注接触面受到的合力,从侧面看这个合力作用于一点上,该点在对应瞬间与地面保持相对静止,并且地面上的这样的点随质心的前移而前移。文献[9]中图1—图6中的支撑力、摩擦力都指这样的合力。本文图1—图4中的总合力也是如此。所以文中的分析适用于脚与地面接触有足够摩擦时的竞走运动,其中的规律既适用于脚踵滚动式竞走,也适用于脚掌着地滚动式竞走。

图1 脚掌着地初受力分析
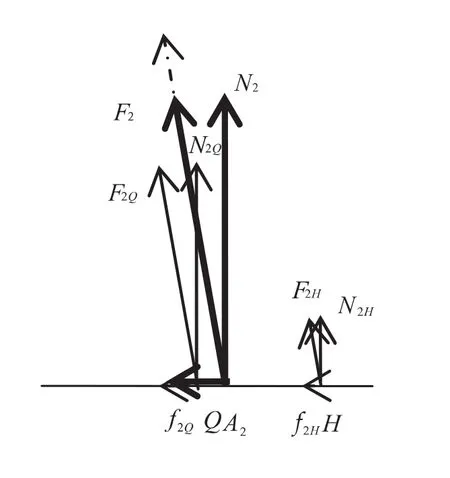
图2 前支撑中段受力分析
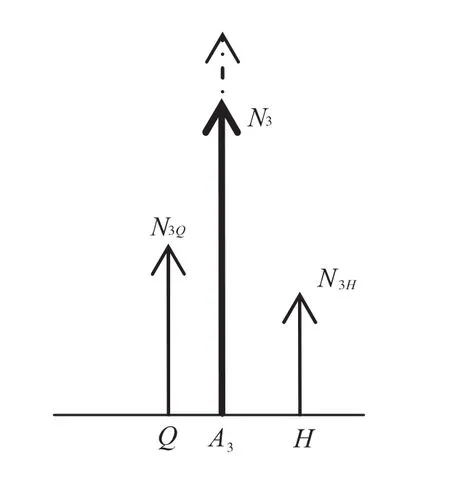
图3 力学竖直态受力分析
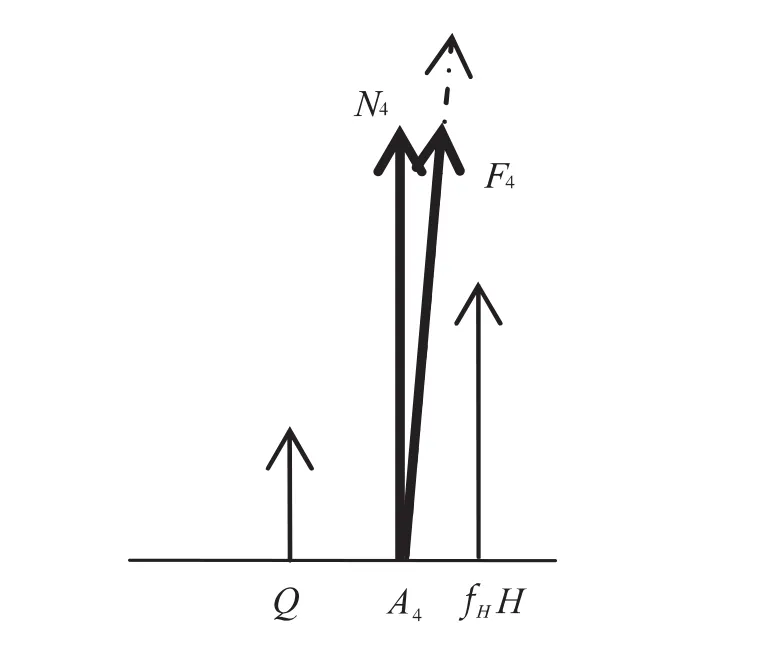
图4 前支撑初受力分析
3.4 “小步、高频”技法之“步”小了多少?“频”高了多少?
我国优秀男竞走运动员的平均步长为1.20 m;同期参赛的外国优秀竞走运动员的平均步长为1.23 m[1]。由于这组数据得到其他分析的支持,这组数据信度较高。如果同一位运动员顺次用两种技法竞走时其对应的平均速度都为4.13 m/s(20000 m竞走比赛时中途走的可能平均速度)时,对应的步频约分别为3.36 s-1(脚掌)、3.45 s-1(小步)。
求得步长差距,不应满足,要刨根,3 cm差在那个环节上了?文献[10]之图2中指出脚踝摆动与脚跟滚动就差了近2 cm;另外当时我国运动员的通病是扭髋小[1],具体表现是着地时保留下来的扭髋S扭2小,也就是说,在着地时段里“小步,高频”技法的水平位移S前要小2cm多,也可能接近3 cm,目前还没有S扭2的测量值。但初步的结论是“小步、高频”竞走技法的步主要小在前支撑时段里。或者说脚掌滚动竞走技法的前支撑位移至少要比“小步,高频”竞走技法的前支撑位移大2 cm多。
4 能耗、制动力比较的思考
竞走中用脚踵着地技法能否减小能耗呢?这个问题的实质和完整的问法是对同一位竞走运动员,采用脚踵着地技法竞走与采用脚掌着地技法竞走时在相同条件下的能耗小吗?即这个问题的实质是对同一位竞走运动员在相同竞走条件下比较不同竞走技法的能耗。
4.1 竞走中的机械能
4.1.1 竞走中机械能的损耗与补充
通过竞走的动力学分析知,稳定竞走运动员每步前支撑时段损失的机械能:

竖直向的损失、水平向的损失、摩擦力功将转化为转动动能。
每步的后支撑时段里补充的机械能:

竖直向的补尝、水平向的补尝、摩擦力将转动能转化为平动能。
4.1.2 同一位竞走运动员采用不同的竞走技法时能耗的比较
运动员采用不同技法竞走时前支撑时段里的能耗都可表述为:

式(1)表明,决定竞走中能量损耗的因素太多,涉及的运动参量有v腾、v小、J心、ω心、h等。所以,想用控制变量法理想地进行能耗比较也不易做到。用这个关系式比较能耗还有不科学之处,因参赛的运动员走的路程都相同,但每位运动员的步长不同。故用式(1)比较时还应除以对应情况下的前支撑步长S前(前支撑时段的水平位移)。

即前支撑时段里摩擦力做功过程中,得到的转动动能等于水平方向损失动能的一半(另一半以内能的形式散失)。所以式(1)写为:

所以前支撑时段里每米位移上消耗的机械能为

该式表述运动员用某种技法竞走时,前支撑时段里每单位位移上的能耗。
4.1.3 更科学细致地比较能耗
用上式直接求出能耗值说明以某种技法竞走的能耗仍不够细致科学。应进一步比较相同条件下每单位位移上竖直方向上的能耗与每单位位移上水平方向上的能耗。在数值上分别为:

用这样方式比较,方可科学地比较能耗的大小。
竞走属长时间竞速项目,动作的向前性或直线性是经济性的直观体现,任何背离身体向前性、直线性的偏差都会造成不必要的浪费[1]。在没有更好的方法比较能耗多少的情况下,将我国竞走运动员高度波动大多做的功折算为水平方向能多走的步数。现在可用上述思路通过式(4)来说明竞走运动员某段稳定竞走中竖直方向耗费的能量值,可用式(5)说明竞走运动员同一段稳定竞走中水平方向耗费的能量值。
4.1.4 具体比较
比较的前提:同一位竞走运动员(质量一定,形体一定,既便是采用不同的竞走技法,形体参量也相近),用不同的竞走技法以相同的平均速度竞走(v-相同。竞赛中比的就是平均速度,不加上这个条件无从比较)。
用的装备及测量方法:用文献[10]中图5的测量装备和测量方法。
例说:某男子竞走运动员质量55 kg,用脚掌着地技法在跑台上稳定竞走,跑台皮带的速度调至4.13 m/s(试验者某次竞赛中途走的平均速度v-),测得步频f的平均值为3.36 s-1、步长 λ的平均值为1.23 m、支撑位移S支的平均值为0.97 m、后支撑位移S后的平均值为0.52m、前支撑位移S前的平均值为0.45 m、腾空位移的平均值为0.27 m;一步用时t的平均值为 0.298 s、支撑用时 t支的平均值为0.238 s、后支撑用时 t后的平均值为 0.128 s、前支撑时段用时t前的平均值为0.110 s、腾空时间t腾平均值为0.060 s、腾空位移 S腾平均值为0.260 m[10],质心高度波动h的平均值为0.040 m。可求得腾空速度v腾的平均值为4.33 m/s、支撑均速的平均值为4.08 m/s,通过= S前/t前=(v腾+v小)[9]进而进而求得求得最小速度的平均值为3.84 m/s(也可直接测出,但误差较大)。于是可用(4)、(5)分别求得:

即该运动员以4.13 m/s的平均速度在跑台上用脚掌滚动技法竞走时,竖直方向每单位位移上损失的能量为48 J,水平方向上每单位位移上能量损失为122 J。
举例中,不论是位移、时间,都是先测量数值大的量,而后测量数值小的量。再求出所需支撑均速、腾空速度、最小速度。为的是测的准些。从例中可看出,不时行更细致的测量,无法进行能耗的比较。
同一位男子竞走运动员在跑台速度(4.13 m/s)不变的情况下,用“小步、高频”技法竞走时进行同样的测量、推算,同样可完成(6)、(7)式的计算,求出用“小步、高频”技法以4.13 m/s速度竞走时竖直向和水平向单位位移上的能耗。从而完成两种技法能耗的比较。如知用“小步、高频”技法时知道身高波动为0.050 m,可直接求得用“小步、高频”技法竞走时 ey损=(55kg × 9.8m/s2× 0.050m)/0.43m=63J/m,比48 J/m大许多。当然进行相应的测量和推算后,也能说明用“小步、高频”技法竞走时,水平方向的能耗也大。因为用“小步、高频”技法竞走时前支撑位移要短。例如可推知用“小步、高频”技法竞走时前支撑位移不会超过0.43 m。可估算出该运动员用“小步、高频”技法竞走时水平方向的能耗约为:

如能用文献[1]中的底片,采集速度相近的中外运动员的平均数据对比,结果会相同。因为“小步”主要小在前支撑位移上。而式(6)分母中的位移即为前支撑位移的值。
4.2 竞走中的制动力
再用上节中的条件和具体数据说明一下竞走中着地时段水平方向的作用力。令运动员脚对皮带的水平作用力为冲击力;皮带对人脚的反作用力与运动反向相反为制动力,用f'前表示,与文献[9]中的f'前同义。所以=|=|mv小-mv腾|=m(v腾-v小),所以数值上对平均力有=m(v腾-v小)。
这表明,对实验者而言,在4.13m/s平均速度情况下,用脚掌着地技法竞走时其所受的平均制动力=55kg(4.33m/s-3.84m/s)/0.110s=245N。
对实验者用“小步,高频”技法竞走时的平均制动力也可如法泡制。相比之下“小步,高频”竞走技法竞走时的平均制动力不是减小而是增大。因为其前支撑位移小,对应的支撑时间短(可由==及前支撑位移小推出)。
专家检验时如能在同场竞技的底片上选速度相近的中外运动员的数据推算对比同样有说服力。显然,不进行更细致地测量无法对比。
上述说明的结论是明确的:“小步,高频”竞走技法的制动力及单位位移上的能耗均较大,而不是减小了。现代的科技水平还可以用实验测量来证明这一点。
5 脚地之间的作用是竞走运动的“根”
最典型的例子便是“小步、高频”竞走技法的依据。没有深入地研究人脚与地的相互作用过程及力学关系,只依据粗浅的判断就以为脚踵滚动的制动力小、能耗小,从而力挺“小步,高频”竞走技法,以致铸成大错。
5.1 送髋的机理
研究表明,我国优秀竞走运动员普遍存在的技术缺点:髋关节向前送的幅度小。向前送髋有利于增加步长和获得向前动力。髋关节的最大内旋角取决于髋关节的灵活性、向前送髋幅度及下肢前摆幅度。与髋关节内旋角度相对应的根源性训练要素为:髋关节灵活性、大腿前侧肌群力量、胫骨前肌力量[1]。
下面着重说明脚掌着地竞走技法送髋的机理。前面用图1—图4说明了脚掌着地技法脚掌处受力情况的变化和合力作用点的前移。可以设想下面还有个图5,图5中脚跟已经离地,脚部受到的支撑力集中到脚掌处。此后运动员用脚掌着地的滚动。从此运动员开始送髋。此前摆动腿已经开始绕支撑腿脚扭动(扭动也是摆动,在这里“扭”代表绕竖轴的摆动),这时扭动的动力由图1—图4中脚跟与脚掌处提供的力偶矩提供。即图1—图4中的Q及H处还有垂直于前进方向的摩擦力,Q、H两处垂直前进方向的摩擦力方向相反,大小相等,构成力偶矩。过了力学竖直状态后随着支撑腿脚开始蹬伸,摆动腿不断加速,所需的扭动力矩迅速加大,随着脚跟离地脚掌对地面的压力增大,用力扭动身体时可在脚掌与地面的相互作用中得到较大的扭动力矩。最大的扭动力矩产生在脚掌与脚姆指这个三角形着地部位的两侧,扭动的角加速度的最大值也产生在这个时段,最后脚姆指蹬伸时刻扭动的角速度最大。地面提供的外力矩使得摆髋时质心对地产生的扭髋位移为,它等于腾空开始前瞬间运动员质心与支撑腿髋关节中心的水平距离。支撑时段里运动员要积极地扭髋,送髋中的“送”字,反映扭的主动性。必须明确的是,如不在脚与地面的相互作用上下功夫,只注意身上的肌肉怎么动,不能实现有力的送髋。因为扭髋的“根”在脚下,在与地面的相互作用上。扭髋位移S扭1相对其它分位移而言要小许多,但不能忽视它。因为扭髋使质心得到的线速度的向前分量要叠加到质心向前运动的速度上,利于提高质心的水平速度和腿的摆速及摆幅,有力的扭髋有利于提高运动员的腾空速度,但也应适度地追求。
由于运动员的上下体的扭动同步、等大、反向,极积主动地送髋,在表观上必然表现为上体积极的扭动。所以观察上体的扭动,也可判断出是否积极地送髋。波兰竞走冠军科尔泽尼奥斯基竞走中上体的积极扭动[4],说明了他能积极有力地送髋。
用“小步、高频”竞走技法竞走时,支撑脚支撑时段里在垂直前进的方向上也要产生扭动的力偶矩。但由于采用这种技法时脚部与地面接触的面积有限,且对脚部的活动不易操控,不论运动员如何努力,都无法从与地面的相互作用中得到较大的扭动力矩。这就决定了我国竞走运动员采用“小步、高频”竞走技法竞走时,普遍存在扭髋的内旋角小,送髋的分位移S扭1小的现象。这是“小步、高频”竞走技法增加步长乏力的一个原因。
5.2 缓冲与蓄势
竞走的前支撑过程是缓冲过程。着地过程中,支撑腿的髋关节扭动的复位、支撑腿的摆动、着地脚踝关节的摆动、脚跟的滚动等动作都起缓冲作用。前面已说明。同一位竞走运动员用不同技法竞走,当竞走的平均速度、腾空时间、腾空位移及着地角相近时,其腾空速度、最小速度相近,因而运动员着地过程中的能耗相近。一则,缓冲的作用并不能降低能耗,缓冲的作用是减小冲击力的峰值和减小冲击力的平均值;二则,既然缓冲过程中不能降低能耗,就应追求在缓冲时段里取得更佳的效益。脚掌着地竞走技法,在相同能耗和动量损耗的条件下,可得到较大的水平位移[10],所以这种技法对增大步长有优势。
对长时间的周期运动而言,缓冲时段应为后面的蹬伸创造尽量好的条件,这叫蓄势。蓄势是为腿脚蹬地创造更好的条件。用脚掌着地技法竞走,可保证低姿态(重心低),重心升高的少。有了这种蓄势,才能有力地蹬伸,使蹬伸的竖直分力较小、水平分力较大,才能取得更好地向前性结果。相比之下,“小步、高频”竞走技法做不到这些(质心升的较高),也是其蹬伸的水平分力小的原因。缓冲期间尽量使脚部的肌肉放松,也是一种蓄势。可是相比之下,用脚踵滚动技法时支撑脚的许多肌肉在缓冲时段都不能放松(每个人都可以亲身体验)。
缓冲与蓄势都涉及人脚与地面的相互作用。缓冲与蓄势的关系也是一个课题,是长期没有关注的课题,有必要深入研究。脚地之间的作用是竞走运动的“根”,是田径运动的“根”。正确认识脚地之间相互作用的力学规律、生物力学规律是当务之急。
6 竞走运动中步长与步频间的关系
采用脚踵着地滚动竞走技法是否增快步频(增大了点)、增加步长(相比之下增量小许多)已有定论,不再赘述。这里侧重谈谈竞走运动中的步长与步频间关系的力学原理。
6.1 竞走的频率响应曲线是对竞走步长与步频间关系的具体直观揭示
在不刻意追求步长和腾空时间的情况下,从宽泛的速度范围(《田径运动高级教程》表35就满足这样的条件)、摆动角度看,对某位竞走运动员,在3.25 m/s到4.75 m/s这个速度区间里,试验者竞走中随着步频的提高步长的变化情况分为三个阶段,开始是迅速加大,并达到一个最大值,以后逐渐减小,最后又增大[10]。该频率响应曲线直观地确切地反映了试验者竞走中步长与步频间的关系。到目前为止,谁也没给出步长与步频间的确切关系,只有频率响应曲线能给出这种确切关系。虽然是一组数据绘图给出的结果,但笔者相信这个结果。因为它依据的毕竟是一组实验数据。
6.2 摆动装置的摆动频率由装置本身的结构及性能决定
悬线上端固定,下端栓一小球,这一装置叫单摆。在固定地方单摆的摆动频率只由其摆长决定。一条形固体上有一固定轴,使其摆动时,其摆动的频率由轴线到固体质心的距离及固体上质量的分布决定。即由固体对其悬挂点的转动惯量决定。如果是用游丝连接的摆轮,它的摆动频率则要由摆轮质量的分布和游丝的弹性系数决定。即一般的摆动装置的摆动频率由装置本身的结构、性能决定,所以称其为摆动装置的固有频率。
6.3 摆动装置的摆幅与策动力频率的关系
摆动装置摆动时或启动时要消耗机械能,使摆动装置摆动需要周期作用的外力来输入能量,这个周期作用的外力叫策动力。如:大人使小孩子摆秋千时,大人推秋千的力就是策动力。这个力合拍,秋千的摆幅就越来越大。这就是摆幅与策动力频率间的一种关系,也是摆动体对机械能的吸收与策动力频率有关。所谓合拍,就是策动力的频率要与秋千摆动的频率相等,策动力作用时机要恰到好处。否则秋千就摆不起来,甚至会使秋千停下来。对各种摆动装置施加策动力,都很有讲究。对较复杂的摆动装置(如人体),探究摆动装置的摆幅(如步幅)与策动力(肌肉施加的有节奏的力)频率间的关系要通过一定形式的试验来探索,这样的试验叫频率响应试验。对于简单的机械摆动装置,物理工作者已通过大量的试验、测算了解了其频率响应规律。对复杂的机械装置如桥梁、汽车、机器、飞机、运动员等,必须通过相应的试验测量其频率响应规律。人身上各肢体由关节链接,由众多肌肉提供策动力,决定了人肢体的摆动是复杂的组合摆动,它的频率响应规律要比简单机械摆动装置的频率响应规律复杂得多。必须通过频率响应试验了解其振幅与策动力频率间的频率响应规律。一看到“步长、步频间关系”的说法,就很自然地联想到频率响应试验,带着这种敏感审视《田径运动高级教程》时,发现其中表35数据的用途而画出频率响应曲线。竞走的步长与步频间的关系是一种力学关系,只能用力学的研究方法解决,用频率响应规律来表述,从力学角度去认识。
频率响应曲线上有摆幅的极大值,从振动角度看,它对应的状态就是共振状态。这不是想象出来的,这是在有相关知识情况下看出来的。
6.4 频率响应规律反映的问题
许多文章找我国竞走运动员与外国竞走运动员竞走的差距。笔者觉得我国在选材上也有差距。我国竞走界在选材方面的研究不够[11],因为没有找到了解运动员形体结构隐含因素的方法。人体的结构,肌肉的分布、性能也和人的脸一样有这样那样的区别。竞技运动是极限运动,应当在各种差异中选择最理想,最合理的。外在的形体差异可直接观察到,但人体内部肌肉、肌腱的性能及分布的细节差异是看不到的。复杂装置的频率响应规律只能通过实验绘制频率响应曲线的方法来认识,它虽然不能给出肌肉、肌腱的具体分布和具体性能,但它能用量化的相关力学参数将它们反映出来。如:竞走的频率响应曲线可量化身体内部的粘滞阻力、腿摆动的固有频率、极限摆幅、极限摆频、加速能力等等;如通过实验绘制出扭动的频率响应曲线,还可给出扭动的固有频率,扭动的极限角度及扭动与摆动的最佳配合等等。只有对自己的运动员的能力特点了解细致入微,对运动员的训练才能达到极致,才能使他们的发挥达到极致,才有可能在残酷的竞争中取得胜利。
7 结论
1)从理论上说,用脚掌着地竞走技法竞走时着地脚也是沿着地面滚动。
2)例说了两种竞走技法的制动力与能耗的一种比较方式。对同一位竞走运动员而言,采用脚掌着地技法竞走时其单位位移能耗要小,平均制动力要小。此项研究使对竞走能耗、制动力的比较进一步科学化。
3)“小步、高频”竞走技法扩步乏力的多种原因。缓冲时段里的效益低;送髋无力;蹬伸的水平分力小、操控能力差。
4)竞走运动涉及的是“人—地”系统,而不止是人。力学规律告诉我们,只有外力、外力矩才能改变身体对地面的运动状态。各种运动技巧与一系列的肌肉有节律的运动有关,但最终要落实到脚与地面的相互作用上。当前应注意研究人腿脚与地面相互作用的力学规律,应注意研究缓冲与蓄势、送髋的原动力和追求腾空速度等的技巧。
5)竞走的步长与步频间的关系是力学规律,必须用力学方法进行实验探究。竞走中的频率响应规律本身有待于深入研究。研究频率响应规律对多种竞技运动有重要意义。
6)竞走教练缺乏力学知识是竞走运动走弯路的根源。如果当时的竞走教练中哪怕有一位懂些力学知识,讲得出道理,也不会采用脚踵滚动竞走技法,我国的竞走运动也就不会走这么些年的弯路。
7)竞走的动力学规律不但适用于各种类型的竞走,还可用于分析跑步运动。因为跑步运动也可分为前支撑时段和后支撑时段、腾空时段。相关力学规律有待进一步研究、拓展。
8 结语
竞技运动是机械运动的一种形式,运动员及教练员应懂点力学[12],相关的专家应对相关的力学知识有深入地理解。应该吸取竞走运动走大弯的教训。由于近二十多年力学在竞技领域里的应用进入低潮[13],要改变这一状况尚须时日。
力学方法研究竞技运动进入低谷,并不表明力学在竞技领域没有用武之地,而恰恰孕育着竞技力学的发展机遇。研究的尚不深入不完善,对其持怀疑态度很正常,但应用实测数据肯定或否定之。
专项特征是指一个运动项目在比赛规则的允许下,以获得最大的运动效率为目标,在力学、生物学等方面的主要运动特点。在竞技训练中,如果不能准确地认识项目的运动特征,运动训练将失去目标和方向,如不能正确把握规律,就不可能保证高效率的持续发展。[3]
[1]胡好,王林,骆学锋,许占鸣.优秀竞走运动员技术训练结构与训练实施研究[J].中国体育科技,2011(2):8-20.
[2]敬龙军,王鹏,苑廷刚,等.中、外优秀竞走运动员运动技术分析[J].中国体育科技,2011(1):21-28.
[3]陈小平.论专项特征——当前我国运动训练存在的主要问题及对策[J].体育科学,2007(2):75-78.
[4]文超.田径运动高级教程[M].北京:人民体育出版社,2005:256-267.
[5]李继辉.中国优秀竞走运动员技术风格及技术动作的运动学分析[J].沈阳体育学院学报,2007(1):68-70.
[6]赵俊龙.对我国优秀少年女子竞走运动员主要技术特征的运动学分析[J].沈阳体育学院学报,2004(12):6-8.
[7]王君侠,吴玲珍,王峥.我国竞走技术现状与北京奥运会的对策研究[J].西安体育学院学报,2006(1):82-84.
[8]王宴,周宏.第28届奥运会20km竞走比赛中、外优秀运动员表现的比较研究[J].北京体育大学学报,2006(12):96,封三.
[9]董俊道.稳定竞走力学规律初探[EB/OL].(2012-06-01)[2012-06-22].http://www.paper.edu.cn/idex.php/default/releasepaper/content/2012,06-22.
[10]董俊道.竞走的运动学分析与频率响应规律初探[EB/OL].[2012-06-22](2012-06-22).http://www.paper.edu.cn/idex.php/default/releasepaper/content/2012,06-20.
[11]王乙淇,王新娜,郭新平.我国竞走科研状态调查与分析[J].河北体育学院学报,2008(4):91-93.
[12]王传平,骆学峰,胡好,等.我国青少年教练员队伍现状及质量建设研究[J].河北体育学院学报,2011(1):58-61.
[13]运动生物力学分会.运动生物力学学科发展研究报告[R].北京:中国体育科学学会,2007:132-158.
