Hybrid control of variable-speed variable-pitch system in wind power generation
2013-10-17CHENTiejunNINGMeifengWANGZhaocai
CHEN Tiejun,NING Meifeng,WANG Zhaocai
(College of Electrical Engineering,Zhengzhou University,Zhengzhou 450001,China)
Abstract: A control model based on hybrid automata is proposed for the complex system of VSVP(Variable-Speed Variable-Pitch) wind power generation with big random disturbance,multi-state operation and time-varying structure,which takes the output power,rotor speed and pitch angle as the main study objects. With fully consideration of the coupling relationship between variable-speed control and variablepitch control,the control process is divided into four stages and the control algorithm combined with the estimation control is given for the controller of each stage. The simulation model of a 1 300 kW VSVP wind power generation system is established with MATLAB / Simulink toolbox and the simulative results show that,with the proposed control model,higher wind power utilization efficiency and better power quality are achieved.
Key words: wind power;hybrid automata;variable-speed variable-pitch control;estimation control
0 Introduction
VSVP(Variable-Speed Variable-Pitch) generation system will be the direction of large wind generator’s development in the high volume wind power generation system. But adding VSVP devices to the system will complicate the control system,and traditional control models have been unable to get the ideal control effectiveness. In recent years,many scholars have done a lot of research to improve the control method such as variable structure control[1],adaptive control[2],predictive control[3-6],fuzzy control[7]and so on. In the cases of multiple loading conditions operation,heavy random disturbance,hided uncertain factors and time-varying structure,adopting above control structures and methods can make better control effectiveness,but it will cause serious fluctuation of the output power.
VSVP wind power generation system has the typical hybrid system’s structure.In a certain work model,it’s a continuous dynamic system driven by the time;while changing between diversified work models,it can be regarded as the event driven discrete dynamic system.This paper focuses on the division of the state space in hybrid system,a hybrid automata control structure applied to VSVP wind power generation system is set up.As estimation with certain information foundation is a useful way to overcome large inertia delay of the wind power generator,estimation control of chain system theory[3-6,8]is used to realize the system’s control algorithm,which is the innovation from other control.Section 1 presents the analysis and model of the control structure.Section 2 realizes estimation control algorithm.Simulation results are given in section 3 to verify the proposed control strategy.Section 4 is conclusion.
1 Analysisand Model of VSVP Wind Power Generation System
The structure of the VSVP wind power generation is very complex,through mechanism analysis,the model of the control structure is set up.
1.1 Structure of VSVP Wind Power Generation System
VSVP wind power generation system consists of three main parts:generator,transmission and wind rotor.
The discussed generator in this paper is threephase wound rotor induction generator. According to reference[9],without thinking the change of wind direction,the electromagnetic anti-torque is given in the d-q reference frame rotating at synchronous speed as follows:

Where npis the number of poles,Lris the inductor of the rotor,Lmis the mutual inducor between rotor and stator,φris the total rotor flux vector,and Isqis the q-axis current component.
Ignoring the stator copper loss,generator’s output power(Pg) is equal to electromagnetic power(Pe).

Without thinking of transmission damping of the wind rotor and the generator,the rotor rotation equation can be deduced as follows:

In the above equation,Jris the rotational inertia,n is the gear transmission ratio,and Tris the output torque.
From equations(1)-(3),we know that the electromagnetic anti-torque of the generator can be controlled by the q-axis current component,so that the rotor speed can be regulated.
According to empirical formula[10],the mechanical power of the wind turbine extracted from the wind is:

Where v is wind speed;Cpis the power coefficient of the wind turbine,which is a function of the tip speed ratio λ and the blade pitch angle β.An empirical formula[11]is introduced to describe Cpas shown in equation(5).

λ is defined as:

β can be reduced as a first-order inertia link[12]:

Where βris inferred to as input pitch angle,Tβis inferred to as time constant,Kβis scale factor.
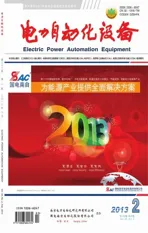
From the above analysis,the structure diagram of VSVP wind power generation system can be obtained as shown in fig.1.
In fig.1,U is the control signal of pitch change and Isqis the control signal of speed change. We can see that the processes of pitch change and speed change are intercoupling,so the traditional control structure is difficult to achieve the desired control effect.
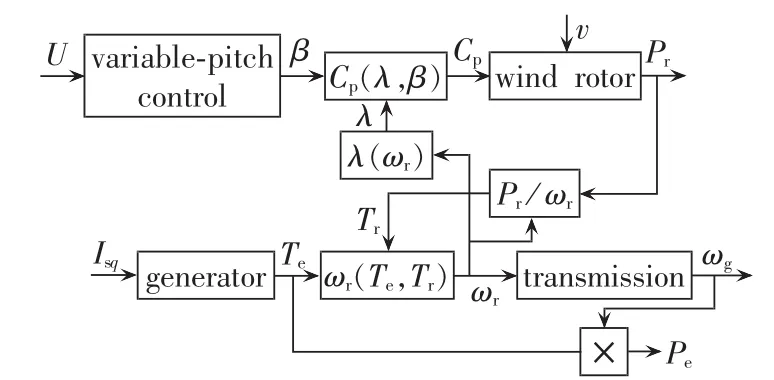
Fig.1 Structure of VSVP wind power generation system
1.2 Model of Hybrid Automata
The basic control strategy can be determined by the performance evaluation of the VSVP wind power generation control system as follows:when below the rated wind speed,in order to obtain maximum wind energy,the wind turbine adjusts the rotor speed to maintain optimum tip speed ratio;when above the rated wind speed,it changes the blade pitch angle and limits collection of the wind energy to keep a rated output power[13].
The control schematic is shown in fig.2.Where ωris the rotor reference rotate speed,and Prefis the generator reference power.

Fig.2 Control of VSVP wind power generation system
The control system consists of discrete monitoring system,interface part,setting values of the control loop and multi-mode controller as shown in fig.2.Discrete monitoring constantly adjusts the setting values of the control loop along with the wind speed change. Using control signals,multi-mode controller makes the processes of pitch change and speed change to follow the setting values.
1.2.1 Discrete Monitoring System
With the combination of hybrid automata theory,the equation of mathematical model of the discrete monitoring system is built as follows:

In the above equations,Q and L are finite set of discrete states and finite set of continuous state respectively,Vinitis a set of the initial values of variables and initial state space ,f1(q) represents continuous state evolution rule for each discrete state q ϵ Q,f2(q) specifies an enable set for each state,P is output power of the wind turbine,δirepresents discrete state variables in different work modes,siis referred to state space for different wind speeds,and i=1,2,3,4.
1.2.2 Interface Part
Mutual transformation between discrete variables and continuous variables is the main task of the interface part. The mapping between the set of continuous states and the set of discrete events are described as follows:

Where vin,vNand voutare start wind speed,rated wind speed and cut off wind speed of the wind turbine respectively,PNis the rated power.
Combining equations(14) and (15),the mutual transformation between discrete events and continuous state space can be achieved. Through these mappings,the dynamic behavior of the controlled process can be controlled by the decisions of the discrete monitoring system.
Prefand ωrare the setting values of the control loop.Control loop can adjust the values according to the operational status of the wind power generation system.
The references of power and rotor speed are given as follows:
To ensure the optimum tip speed ratio and maximum wind energy utilization efficiency,the optimal Pmaxis determined by the following equation[14]:

Where Kp,Kiand Kdare proportional coefficient,integral coefficient and differential coefficient respectively.The objective speed of the wind rotor ωobjis:

Where λoptrepresents optimum tip speed ratio.
1.2.4 Controller
The blade pitch angle and rotor speed are the actual control objects of VSVP control process.According to the decisions δi=1 of the discrete monitoring system,the control process of VSVP power generation system is divided into several stages and different control rules will be taken in different stages so as to meet the requirements of multiple states control.
In this part,the initial values of each state and the state transition conditions are given by equation(8) to equation(19). On the basis of the control objectives of the VSVP wind turbines,the state space of the system is divided into four parts and finally the hybrid automata model is set up as shown in fig.3.

Fig.3 Model of hybrid automata
2 Estimation Control Algorithm
Through the analysis of the previous section,we know that the control of the wind generation system is divided into four parts,and the corresponding control rules can be concluded as follows.
a.If δ1=1,then the state space will be s1.From the equations(16) and (19),we have ωr=0 and Pref=0.In this case,both control variables U and Isqare equal to zero.
b.When in the circumstances of δ2=1,we can see that the VSVP wind generation system is in state space s2and the reference values are ωr=λoptv/R,Pref=Pmaxbased on the equations(14) to (19).The output control variable of thepitch change process can be obtained as U=0 and fig.4 shows the structure of rotor speed control.

Fig.4 Structure of rotor speed control
The above system’s behavior can be described as a difference equation:

Where a1,a0,b and c are the parameters to be estimated.Assuming that the system’s output value and the desired value have the following relationship[8]:

Where p is the design parameter of estimation algorithm.
Combining equations(18),(19) and (21),we can get:

Then substituting equation(22) to equation(20),we can get the control variable of the rotor speed change process as follows:

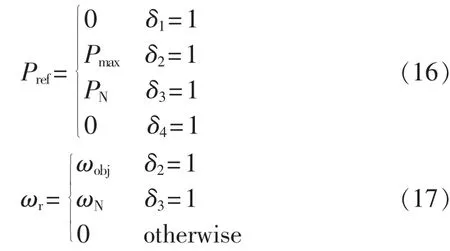
c.When δ3=1,the VSVP wind generation system is in state space s3.By equations(14) and (17),we can get ωr= ωNand Pref=PN.In order to keep the rotor speed and power of the wind turbine to be a constant value,the control variable of the rotor speed Isqis a constant C,i.e.Isq=C.The structure of pitch angle control is shown in fig.5.
Fig.5 Structure of pitch angle control
In such case,the behavior of the VSVP wind generation system can be described as a secondorder difference equation:

Based on equation(19),equation(25) is given as:

Then substituting equation(25) to equation(24),the control variable of the pitch change process can be deduced as:

d.When δ4=1,the system is in state space s4.Reference values of the system ωr=0 and Pref=0 can be got from equations(14) and (17).In this condition,both control variables of the pitch change process and the rotor speed change process are equal to zero:U=0,Isq=0.
3 Simulation Results
In order to verify the reasonability of the modeling and control strategy of the hybrid automata,the space-time wind speed model[15]used in the simulation has four components:

Where vbis the basic wind speed,vgis the gust speed,vris the regular wind speed,and vnis the noise wind speed.Assuming that vb=14.5 m /s,the model of input wind speed is shown in fig.6.

Fig.6 Model of natural wind speed curve
Hybrid automata based 1 300 kW VSVP wind turbine system is simulated in MATLAB/Simulink.The parameters of the system are shown as follows:turbine’s blade radius is 31 m,cut-wind speed is 3.5 m/s,rated wind speed is 14.5~20 m/s,optimum tip speed ratio is 7.5,transmission ratio is 1∶80,and inertia is 2 460 106 kg/m2;generator’s pole pair is 8,rated power is 1300 kW,rotational speed range is 1600~2100 r/min,synchronous speed is 1500r/min,rotor flux linkage vector is 3.48 Wb,stator inductor is 1.580 mH,rotor inductor is 1.690 mH,inertia is 52 kg/m2.
The control algorithm relies on accurate system parameters,but in the actual operation,the parameters of the system drift along with the change of the environment as well as the change of the time.In order to realize the real-time control of the system,recursive algorithm of the least square method for online identification is used to determine the real-time value of the system parameters in equations(20)- (24).To verify the validity of the pro-posed control algorithm,the parameter values[16]are given as follows:a1=1.501,a0=1.002,b=-0.46,c=0.409,a′1=2.403,a′0=1.801,b′=1.682,c′=0.249,p=p′=0.5.
We use a conventional control model for comparison,in this model the variable-speed control and the variable-pitch control is separated. The variablespeed control uses a traditional PI controller,while the variable-pitch control uses a traditional PID controller. The simulation results of the output power of the conventional control model and the proposed control model are shown in fig.7,and the wind power utilization efficiency of the two models are shown in fig.8.

Fig.7 Output power of wind turbine
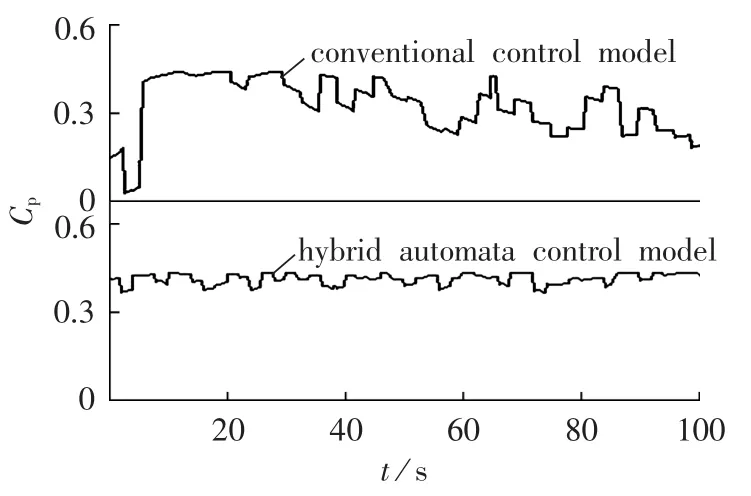
Fig.8 Utilization efficiency of wind power
Based on fig.7,we can conclude that the hybrid automata control strategy with estimation control algorithms can obtain a more stable and smooth output power compared with the conventional control strategy. From fig.8,we can see that the proposed control method has higher wind power utilization efficiency.
The rotor speed curve and the blade pitch angle curve of the hybrid automata based VSVP wind turbines are shown in fig.9 and fig.10.
The speed curve shows that the rotor speed doesn’t fluctuate seriously along with the change of the automata state and the wind speed,but always stay in the rated speed range;compared with the traditional control,the blade pitch angle curve shows that the pitch angel can adjust to follow the wind speed change much faster and has smaller fluctuation,which can reduce the mechanical wear and lengthen using life.
From the above figures,we can conclude that when the wind speed fluctuates around the rated speed,the hybrid automata can regulate the switch between variable-pitch control and variable-speed control to keep the output power of the wind turbine around the rated power. The simulation results show that the proposed control strategy can increase the wind energy utilization efficiency as well as improve the output power quality.
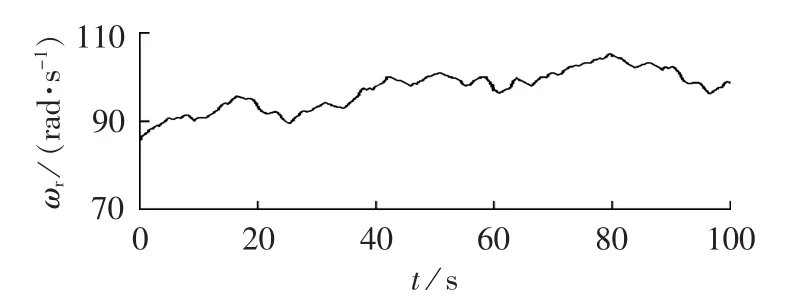
Fig.9 Rotor speed
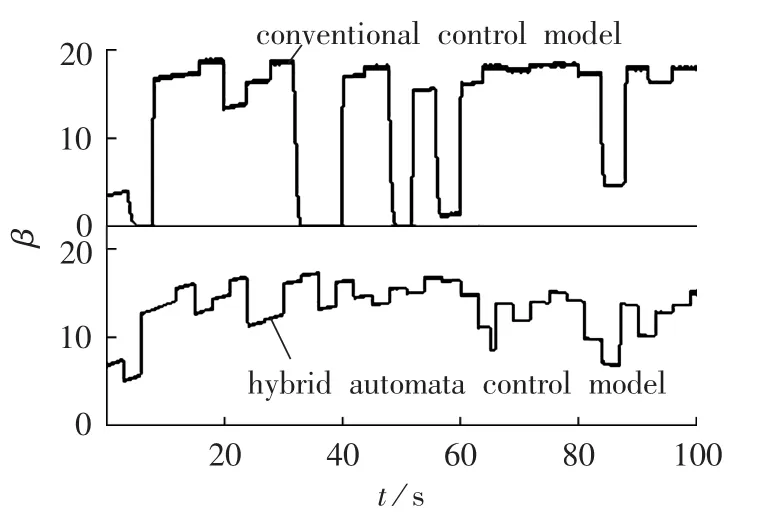
Fig.10 Curves of pitch angle change
4 Conclusion
This paper focuses on the output power,rotor speed and blade pitch angle of the wind turbine,a hybrid automata based control model of VSVP wind power generation system is set up,and the estimation control algorithm of the controller is given by the full consideration of the coupled relation between variable speed process and variable pitch process. Modeling and simulation of the VSVP wind turbines with 1300 kW rated power are carried out,the simulation results show that compared with the traditional control method,it has better output power quality and improves the stability and reliability of the wind turbines in bad environment.