车辆座椅悬架模糊控制与仿真
2013-10-17陈学文张衍成杨威勇邵鹏生
陈学文,张衍成,杨威勇,邵鹏生
CHEN Xue-wen,ZHANG Yan-cheng,YANG Wei-yong,SHAO Peng-sheng
(辽宁工业大学 汽车与交通工程学院,锦州 121001)
0 引言
车辆座椅悬架系统是一个复杂的多自由度振动系统,是车辆减振系统的重要组成部分,可减少司乘人员所受的振动[1,2]。重型货车、农用车和工程车辆由于其工作环境和悬架性能相对较差,使得其在行驶时产生剧烈的振动。这些车辆的驾驶员座椅悬架大多采用被动悬架,其阻尼系数和刚度系数不可调,驾驶员长时间承受激烈振动。并联式主动座椅悬架在提高座椅减振性能方面方便易行,且座椅动态参数的改变对车辆其他性能影响较小[3,4]。因此,研究和改善座椅悬架动态特性对于提高车辆乘坐舒适性有着重要的意义。目前,国内外学者已将最优控制、PID控制、滑模变结构控制、模糊控制和神经网络控制等理论应用于座椅悬架系统的振动控制[2~6],使其控制技术日趋完善。
本文针对座椅悬架系统中存在时变性和非线性的特性,建立了人体-座椅-车辆模型,设计了模糊控制器,并利用MATLAB/Simulink对三自由度系统模型进行了仿真分析。该控制系统可根据路面激励的变化、轮胎载荷和行驶工况要求实时调节控制器的控制力,从而有效地控制座椅悬架系统,提高 车辆的乘坐舒适性。
1 系统模型的建立
1.1 座椅悬架的动力学模型
在车辆减振系统中,振动最终通过座椅传递给人体。文献[5]通过研究人体对车辆振动的响应,得知垂直方向上的振动对人体舒适性影响最大,本文在此基础上提出了三自由度车辆座椅悬架系统简化模型,选取了座椅质心处垂直振动速度的误差及其变化率为控制参量,设计了座椅模糊控制器。其座椅悬架简化模型如图1所示。

图1 三自由度座椅悬架模型
图1中,m1、m2、m3分别为轮胎、车身、座椅(含人体)的质量;k1、k2、k3分别为轮胎、车身、座椅的等效刚度;c2、c3分别为车身、座椅的等效阻尼;u为控制器控制力。zq、z1、z2、z3分别为路面、轮胎、车身和座椅质心处的垂直位移。
根据牛顿第二定律建立系统的动力学方程为:

系统的状态变量为:

系统的输出变量为:
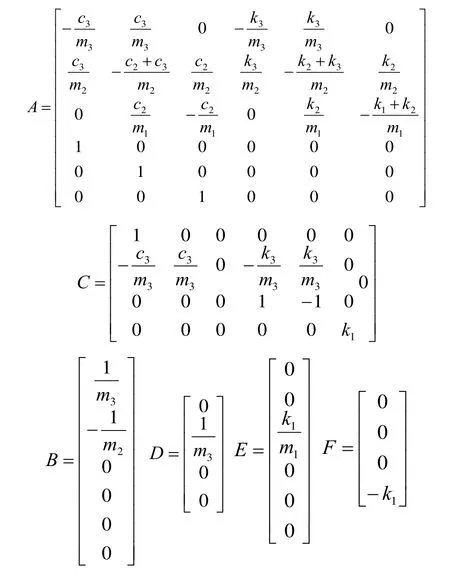
由上可得系统的状态方程:

式中:A为系统向量矩阵;B为控制向量矩阵;C为输出矩阵;D为传递矩阵;E、F为输入向量矩阵。
1.2 路面输入模型
路面不平度是影响座椅悬架动力学特性和引起车辆行驶振动的外部原因。本文采用高斯白噪声来模拟C级路面,其时域模型见式(3)所示,路面仿真结果如图2所示。

式中:标准空间频率n0=0.1m-1,C级路面不平度系数Gq(n0)= 256×10-6m2/m-1,w(t)为零均值单位白噪声,车速v=20m/s。

图2 C级路面
2 模糊控制器的设计
模糊控制器是模拟人类控制特征的一种语言控制器,其设计主要包括控制器结构的选择、控制器输入与输出变量的模糊化、模糊控制规则的选取以及解模糊化等[7,8]。
2.1 模糊控制器的结构
根据座椅悬架的性能要求和控制特性,采用二维模糊控制器,结构如图3所示。

图3 模糊控制器原理图
选取座椅垂直振动速度与其理想速度值的差值视为误差信号e,座椅垂直振动加速度与其理想加速度值的差值视为误差变化率ec,控制器的控制力u视为输出值。
2.2 模糊控制器参数的选取
利用MATLAB提供的模糊逻辑工具箱编辑模糊子集的隶属函数和控制规则表(表1所示),设输入变量e的论域为[-1.5,1.5],ec的论域为[-2.5,2.5],输出变量u的论域为[-1,1]。输入输出变量的模糊子集均为{负大,负中,负小,零,正小,正中,正大},用{NB,NM,NS,ZE,PS,PM,PB}表示,各模糊子集均采用高斯隶属函数,模糊推理采用Mamdani法。
2.3 控制器输出变量的解模糊化
模糊判决的方法很多,常用的方法有最大隶属度法、取中位数法和重心法[9,10]。重心法由于能使系统输出更为平滑而被广泛采用,因此,本文采用重心法对输出量进行解模糊化。
3 仿真结果及分析
为验证控制策略的有效性,在Matlab/Simulink环境下构建系统仿真模型并对其进行仿真研究,设置仿真时间为20s,选取C级路面,行驶车速为20m/s,座椅悬架模型参数如表2所示。
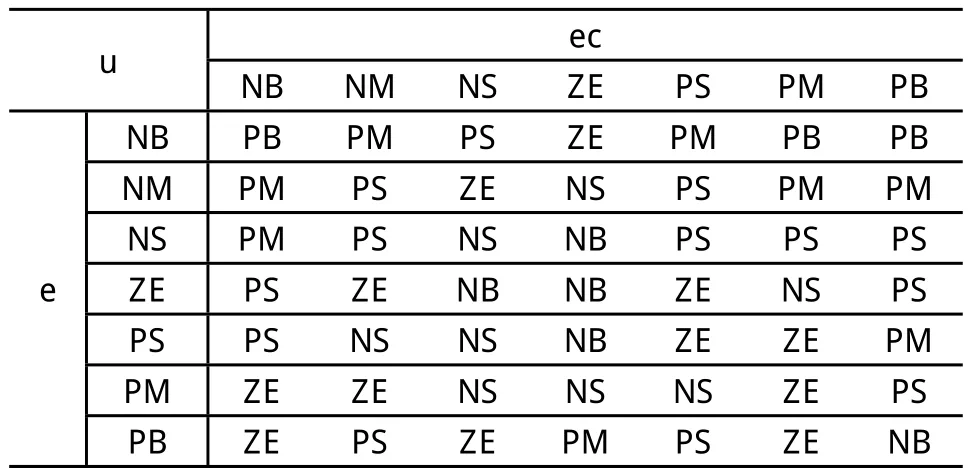
表1 模糊控制规则
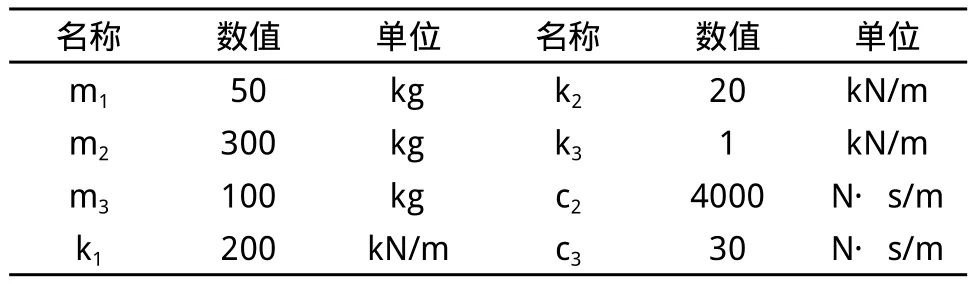
表2 座椅悬架结构参数
图4~图7分别为被动控制、PID控制和模糊控制下的座椅垂向速度、座椅垂向加速度、座椅悬架动挠度和轮胎动载荷的响应曲线对比图。
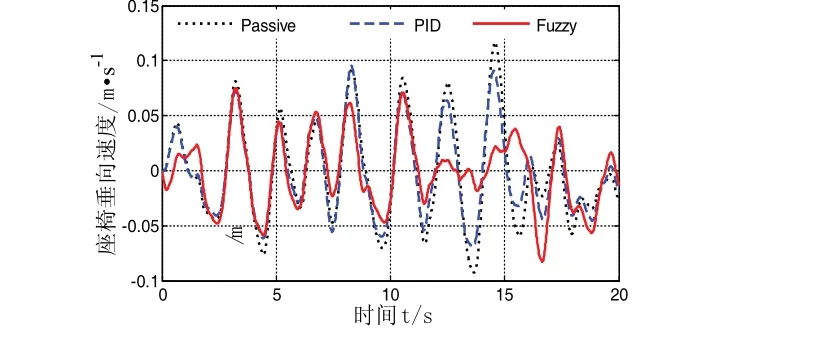
图4 座椅垂向速度响应

图5 座椅垂向加速度响应
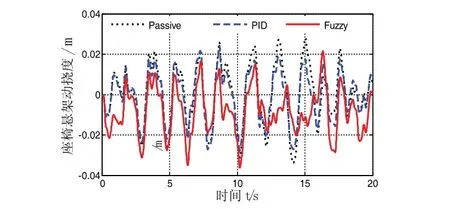
图6 座椅悬架动挠度响应

图7 轮胎动载荷响应
为验证模糊控制器在座椅悬架控制中的优越性,在相同的仿真环境下,同时选取被动悬架和PID控制器的座椅悬架性能进行对比分析,仿真结果如表3所示。

表3 评价指标均方根值对比表
由图4~图7以及表3可以看出,采用模糊控制能够使座椅的垂向速度、垂向加速度、悬架动挠度和轮胎动载荷等性能评价得到明显改善,控制效果理想,提高了系统的平顺性,表明该方法在提高车辆的乘坐舒适性方面有着显著效果。
4 结论
本文对三自由度车辆座椅悬架进行了模糊控制方法研究及其Simulink仿真,结果表明,本文所建立的系统模型是有效的;采用主动控制技术设计的模糊控制器是可行的,达到了预期的目的和控制效果。该座椅悬架的模糊控制系统结构简单,减振效果好,稳定性和鲁棒性高,可用于各种车辆座椅减振系统,可为司乘人员提供安全舒适的环境,具有广阔的应用前景。
[1] 陈云微,赵强.车辆半主动座椅悬架滑膜变结构控制[J].哈尔滨工程大学学报,2012,33(6):775-781.
[2] 郝雪玲,潘公宇,聂秀伟.驾驶员座椅悬架系统主动控制研究与仿真分析[J].机床与液压,2011,39(23): 45-47.
[3] 赵强,杨亚珣.车辆磁流变座椅悬架的模糊自适应整定PID控制[J].噪声与振动控制,2009,(2):106-109.
[4] 孟杰,陈庆樟,张凯.驾驶员座椅悬架模糊控制的联合仿真研究[J].农机化研究,2013,(8):212-216.
[5] P. E. Boileau,S. Rakhejab. Whole-body Vertical Biodynamic Response Characteristics of the Seated Vehicle Driver Measurement and Model Development[J].International Journal of Industrial Ergonomics,1998,22(6):449-472.
[6] 陈杰平,陈无畏,祝辉,等.基于Matlab/Simulink的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11-15.
[7] 柴牧,董恩国,李振兴.汽车主动悬架的模糊PID控制策略[J].机械设计,2013,30(5):1-3.
[8] 王文静.轿车主动悬架系统的模糊控制与仿真研究[D].重庆:重庆交通大学,2012.
[9] 冯冬青.模糊智能控制[M].北京:化学工业出版社,2003.
[10] 夏奇.汽车磁流变半主动悬架控制方法研究[D].重庆:重庆大学,2012.
