基于SEA的远程相控阵雷达探测弹道导弹的效能评估
2013-10-13郭宜忠
宋 超,郭宜忠,王 玲
(空军预警学院,武汉430019)
0 引 言
对于系统效能的定义学界上有多种解释,其中的一种解释是:一个人为的系统必定是为了达成某项功能,该人为系统与用户实际需求的功能的契合度,即是该系统的效能。美国A.H.Levis教授领导的研究小组基于这一认识,在20世纪70年代末至80年代初提出有效性分析(SEA)方法[1-2],认为系统效能应反映系统用户的需求,并且能体现系统技术、系统环境和用户需求的变化。由于远程相控阵雷达探测弹道导弹目标的能力跟地理、气象、目标特性、电磁环境和早期弹道导弹情报信息息息相关,若采用主成分分析法、层次分析法等方法建立评价指标体系来评估其探测弹道导弹效能,则不能体现用户需求的改变和环境的变化对远程相控阵雷达探测导弹目标效能的影响[3]。因此本文尝试用SEA方法,将远程相控阵雷达内各组成部分技术参数,在特定外部环境下,映射到同一个评价探测能力的坐标空间中,在此坐标空间中,通过比较系统能力和使命要求,得出远程相控阵雷达探测弹道导弹的效能。
1 使命任务和性能量度
运用SEA方法对远程相控阵雷达探测弹道导弹的能力进行评估,首先要确定系统、环境和使命,从而确定性能量度。远程相控阵雷达阵面有几千个辐射单元,平均功率能达上百千瓦,具有波束捷变能力的特点,因而可以满足对多目标的搜索、识别、捕获和跟踪等多种功能[4-5]。但随着弹道导弹变轨、子母弹、轻重诱饵、隐身和干扰等技术的发展[6],远程相控阵雷达需要调整硬件配置和开发相应的软件以应对目标环境的变化。据此,对系统、环境、使命的定义如下:
系统——系统指的是远程相控阵雷达。其原始参数包括雷达平均功率、天线有效面积和天线增益等。由于远程相控阵雷达特有的波束捷变能力,因此,原始参数还应包括方位搜索空域、仰角搜索空域、搜索时间、跟踪时间、波束宽度、波束驻留时间。
环境——环境指的是系统所处的地理、电磁和目标特性等外部环境。原始参数包括地理信息数据、电磁干扰参数、目标雷达截面积(RCS)值以及卫星或天波超视距雷达提供弹道导弹的情报信息。
使命——使命指的是远程相控阵雷达采用适宜的工作模式,合理分配雷达搜索和跟踪时间,在责任区范围内搜索、发现并跟踪弹道导弹目标,预测弹道导弹落点位置。具体的使命要求包括3个方面:
第一,在弹道导弹飞出地平线时及时搜索发现目标。
第二,鉴于现代弹道导弹的多弹头、轻重诱饵等现代突防技术,远程相控阵雷达应该具备同时跟踪多批目标的能力。
第三,远程相控阵雷达必须具备一定探测目标距离、方位和速度精度能力,从而能够反推弹道导弹落点位置,为弹道导弹拦截系统提供情报支持。
由此可以确定性能量度集合{P}由3个指标构成,即搜索发现弹道导弹能力指标P1、跟踪弹道导弹能力指标P2、推算弹道导弹落点位置的能力指标P3,具体如图1所示。
图1 远程相控阵雷达探测弹道导弹效能的系统映射和使命映射
2 系统映射
2.1 远距离搜索发现弹道导弹目标能力指标的系统映射
为了在尽可能远的距离上发现目标,远程相控阵雷达通常在3°左右的仰角上设置搜索屏,如图2所示。
假设弹道导弹以角度α飞入雷达搜索屏,速度为V,搜索屏仰角为Δθ,则探测弹道导弹目标的时间(即弹道导弹在搜索屏内飞行的时间)为:
图2 弹道导弹目标穿越远程相控阵雷达搜索屏示意图

假定相控阵雷达在某种工作模式下,搜索目标间隔时间为Tsi,目标被搜索次数n=Δt/Tsi,若在特定气象条件、干扰条件下,雷达每次搜索时对目标的发现概率为Pd,搜索累积检测概率[7]为Pc=1-(1-Pd)n,则远程相控阵雷达搜索发现弹道导弹能力指标P1s可表示为:

2.2 同时跟踪多批弹道导弹目标能力指标的系统映射
相控阵雷达由于其灵活的波束捷变能力,在搜索弹道导弹目标时,可以适时转换成跟踪模式。在一次雷达搜索目标间隔时间Tsi内,可由2个时间段组成,一个为扫描一次方位范围时间Ts,另一个为跟踪时间Ttt,且Tsi=Ts+Ttt。若雷达应完成的搜索空域方位角为φ,雷达天线波束宽度的方位角为Δφ,发射天线波束在每个波束位置的驻留时间为tdw,搜索时步进为1.0,则搜索方位角空域范围所需的时间为:


2.3 推算弹道导弹落点圆概率误差能力指标的系统映射
通常的弹道导弹有其固定的飞行轨道,远程相控阵雷达通过探测弹道导弹目标,能提供一定精度的目标距离、角度和速度信息,从而预测弹道导弹落点位置。
其中雷达测量弹道导弹目标的测距精度为[4]:

雷达测量弹道导弹目标的角度精度为[4]:

雷达测量弹道导弹目标的速度精度方程为[4]:


3 使命映射
在SEA方法中,系统使命的主要方面已经被具体化了,具体化的表现反映在性能指标P中。使命映射就是在一定背景下,把使命原始参数的值域要求转化为对性能指标的值域要求。它完全脱离了系统技术上的指标和性能,仅从系统的使命要求来考虑映射关系[9]。
对搜索发现弹道导弹能力指标P1的使命要求为:在一定作战背景下,远程相控阵雷达搜索发现弹道导弹目标概率不能低于某一个下限Pmin,则使命要求远程相控阵雷达搜索发现弹道导弹的能力指标P1m的值域范围为:

对跟踪弹道导弹能力指标P2的使命要求为:在一定战场环境下,远程相控阵雷达同时跟踪目标数量要达到Nmax,则使命要求远程相控阵雷达同时跟踪多批弹道导弹目标的能力指标P2m的值域范围为:

对推算弹道导弹落点位置的能力指标P3的使命要求为:在一定战场环境下,远程相控阵雷达推算弹道导弹落点的圆概率误差不大于σmax,则使命要求远程相控阵雷达推算弹道导弹落点位置的能力指标P3m的值域范围为:

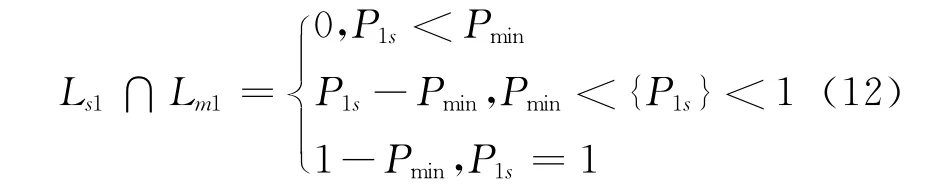
综上所述,雷达搜索目标能力指标P1的系统轨迹和使命轨迹分别为Ls1=P1s和Lm1=P1m,两者交集为:
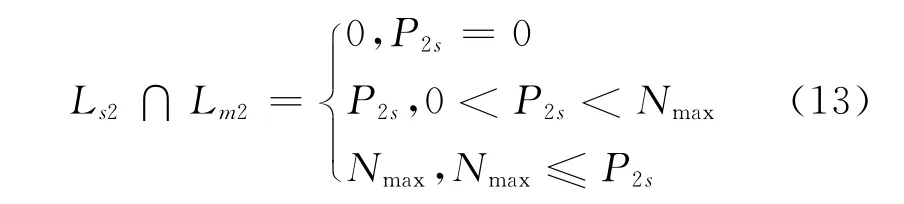
雷达跟踪目标指标P2的系统轨迹和使命轨迹分别为Ls2=P2S和Lm2=P2m,两者交集为:
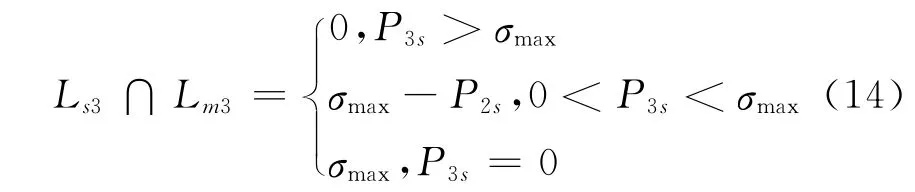
雷达预测弹道导弹落点圆概率误差能力指标P3的系统轨迹和使命轨迹分别为Ls3=P3s和Lm3=P3m,两者交集为:
远程相控阵雷达探测弹道导弹的能力评估值为:

4 算例分析
远程相控阵雷达通常设有不同的工作模式,运用SEA方法可计算远程相控阵雷达在不同工作模式下探测弹道导弹目标的效能以及不同用户需求下探测弹道导弹目标的效能。
4.1 正常工作模式下远程相控阵雷达探测弹道导弹目标的效能分析
在正常工作模式下,取导弹飞行速度为7km/s,导弹飞入角为80°,搜索间隔时间为35s,天线波束驻留时间为0.3s,跟踪间隔时间为15s,天线波束宽度为2.2°,扫描方位空域为100°,测方位角误差为0.28°,测距误差为1.2km,测度误差为20m/s。在小规模局部战争中,敌方可能对我战略要地发射少量弹道导弹,此时使命要求的搜索概率Pmin为0.998,跟踪批数Nmax为20批,落点预报误差σmax为6km,计算可得远程相控阵雷达探测弹道导弹目标的效能E=0.828 1。而在大规模作战中,敌方可能对我发射大量弹道导弹进行先期打击,此时使命要求的搜索概率Pmin可适当降低到0.85,跟踪批数Nmax可增加到40批,落点预报误差σmax为10km,计算效能E为0.677 4。可见单部远程相控阵雷达在正常工作模式下难以完成大规模作战下的任务需求。
4.2 不同工作模式下远程相控阵雷达探测弹道导弹目标的效能分析
远程相控阵雷达有不同的工作模式,在弹道导弹加临近空间工作模式下,由于雷达搜索空域范围很大,可设搜索方位空域为120°,搜索时间为45s,其余的参数采用4.1中的参数设置,算得效能E=0.732 0;当雷达处于弹道导弹增程工作模式下,一般红外卫星或天波超视距雷达事先提供了弹道导弹目标情报信息,可设搜索方位空域为10°,搜索时间为25s,其余的参数采用4.1中的参数设置,算得效能E=0.900 1。可见在卫星和天波超视距提供弹道导弹情报信息的情况下,雷达可采用弹道导弹增程工作模式,效能最优。
4.3 影响远程相控阵雷达探测弹道导弹目标效能的敏感因子分析
通过改变远程相控阵雷达某个原始参数值,观察雷达探测效能的变化,可得出天线波束驻留时间的细微变化对雷达探测效能有很大的影响。若采用4.1中的参数设置,当天线波束驻留时间为0.3时,效能E为0.867 9;当天线波束驻留时间为0.35时,效能E为0.766 6;当天线波束驻留时间为0.4时,效能E为0.520 7;当天线波束驻留时间为0.45时,效能E为0.433 3。可见,远程相控阵雷达探测弹道导弹效能中,天线波束驻留时间是影响效能的敏感因素,在以后的雷达改进研制过程中,首先要考虑的是如何降低天线波束驻留时间。
5 结束语
本文通过预设原始环境参数,假定跟踪目标模式等,理想化地得出系统映射P1s、P2s、P3s,从而最终得出远程相控阵雷达探测弹道导弹的效能E,有一定的理论借鉴意义。后续的研究工作需从以下3个方面入手,从而提高该评估手段的实际意义:
一是研究环境原始参数对系统映射的影响。探索在不同干扰情况、不同目标RCS值、不同气象条件下,相控阵雷达探测目标受到了哪些影响,并建立数学模型,用于系统评估。
二是科学建立P2s。本文假定跟踪每批目标的跟踪间隔时间和天线波束驻留时间是一样的,而现实中的相控阵雷达跟踪目标的模式多达8种,且跟踪每批目标波束驻留时间都不相同,这就要求进一步优化雷达跟踪多批目标模型,探讨在不同跟踪模式下的数学模型建立问题。
三是运用仿真软件智能探求雷达最佳工作状态。用户可通过不断在仿真软件上输入参数值,得出在一定使命要求下雷达最佳的工作模式,这样工作量非常大、效率低。可预设系统原始参数和环境原始参数取值范围及使命要求任务,采用神经网络BP算法,通过学习训练,智能得出在某种使命需求下的雷达最佳工作模式。
[1]Levis A H,Andeadakis S K.Effectiveness analysis of automotive systems[A].Laboratory for Information and Decision System[C],1984:1238-1246.
[2]Levis A H,Michael Athans.Modeling and measuring effectiveness of C3systems[A].Laboratory for Information and Decision System[C],1984:1691-1698.
[3]钱建刚,戎哲萍,许弼.大型相控阵雷达系统效能评估[J].兵工自动化,2007(11):6-8.
[4]王德纯.宽带相控阵雷达[M].北京:国防工业出版社,2010.
[5]张光义.相控阵雷达原理[M].北京:国防工业出版社,2009.
[6]陆伟宁.弹道导弹攻防对抗技术[M].北京:中国宇航出版社,2007.
[7]承德宝.雷达原理[M].北京:国防工业出版社,2008.
[8]温羡峤,刘谭军.地地战术导弹落点及预报[J].现代防御技术,1997(1):1-10.
[9]杨龙坡,熊家军.基于SEA的雷达组网探测能力评估[J].现代防御技术,2011(1):29-32.
