浅析动力定位及操作手取证
2013-10-12李英明
李英明
(交通运输部上海打捞局 上海 200090)
0 引言
随着动力定位技术(俗称 DP)在全世界各国各种类型船舶上的大量推广和使用,DP这个名称对我们来说已经不再陌生,笔者在不同类型的动力定位船上担任船长和 DP操作手多年,想通过这样的方式和大家一起分享这些年来自己对动力定位的认识和理解,让国内更多对 DP技术及作业感兴趣的朋友参与和加入到我们的DP队伍中来。
1 动力定位(Dynamic positioning)的起源和发展
在全世界范围内,DP的诞生并且迅速成为一种成熟的实用技术,主要是随着上世纪60年代开始海洋油气勘探迅速增长和需求而发展起来的。早在2002年全球就约有1 000多艘具有动力定位功能的船舶而且目前还在不断地新建和壮大,其中多数和油气资源的勘探及开发作业有关。随着全球范围和我国深海资源的发展需要,普通的抛锚定位和其他控制船位技术已经无法满足深水作业的要求,DP技术将会更加广泛地被运用到作业环境恶劣,水深较深的作业区域,这也为 DP技术新的发展和更广泛地运用提供了新的机遇。
目前,利用DP船的特有功能和技术可以完成很多的作业,如:海洋矿石钻探采样,海底安装作业,钻井勘探作业,海工吊装,潜水支持,油井维修和改装,海底管线敷设,平台供应,海底电缆敷设,穿梭油轮海上接驳原油,浮式采油装置生产作业,水道测量,重大件货物转运,环球邮轮停泊,沉船勘察打捞和清除,水雷清除,挖泥船作业,海洋科考等等。
2 DP系统的基本原理和组成
DP可以描述为利用一定数量的船舶设备拥有精确控制和移动船位能力的整合系统。DP可以定义为:一种通过主动推进手段专门自动控制船位和艏向的系统。
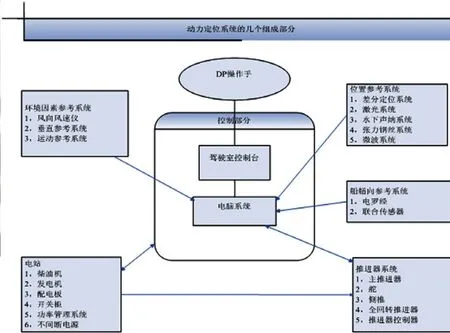
图1
上述定义包括持续稳定在固定位置,精确移动,跟踪和其他的专业定位能力。如果用一种比较形象的方法来描述 DP系统内部不同的构成,可以如图1 所示把系统分成六个部分。
(1)控制部分:包括驾驶室控制台和电脑系统。
(2)位置参考系统:其中主要的有差分定位系统,激光信号系统,水下声纳系统,张力钢丝系统和微波信号系统。
(3)船艏向参考系统:来自一台或多台电罗经的航向信号,以及其他一些综合传输系统的信号。
(4)推进器系统:主要是一些动力执行机构和设备如主推进器、舵、侧推,全回转推进器,推进器控制器等等。
(5)环境因素参考系统:主要有风向风速仪,垂直参考系统(VRU),运动参考系统(MRU)。
(6)电站系统:包括柴油机,发电机,配电板,开关柜,功率管理系统和不间断电源。
所有的这些系统都是围绕 DP操作手这个中心,在操作手的控制指令下执行,反馈,分析判断,修正数据和船位等等,以达到利用整个DP系统来精确控制,稳定和移动船位的目的。
3 影响DP系统稳定船位的船体六种自由运动模式
如图2所示,一般情况下船体的主要自由运动有六种模式,DP稳定船位时主要自动控制偏航,横移和前伸后缩这三种自由运动模式,其中偏航确切地来说就是要控制艏向,所有针对这些船体自由运动而进行的控制船位的操作都是 DP操作手通过设定船艏向和船位来完成的。同时通过一种或几种位置参考系统来测量船位,一个或几个电罗经提供船艏向信息;经过对目前的实际船位,艏向和 DP操作人员设定的船位,艏向之间对比确认其中的误差,DP系统就是通过数据处理和反馈,控制船上的动力系统等将这类误差减小到最小的程度以达到精确稳定船位的目的。
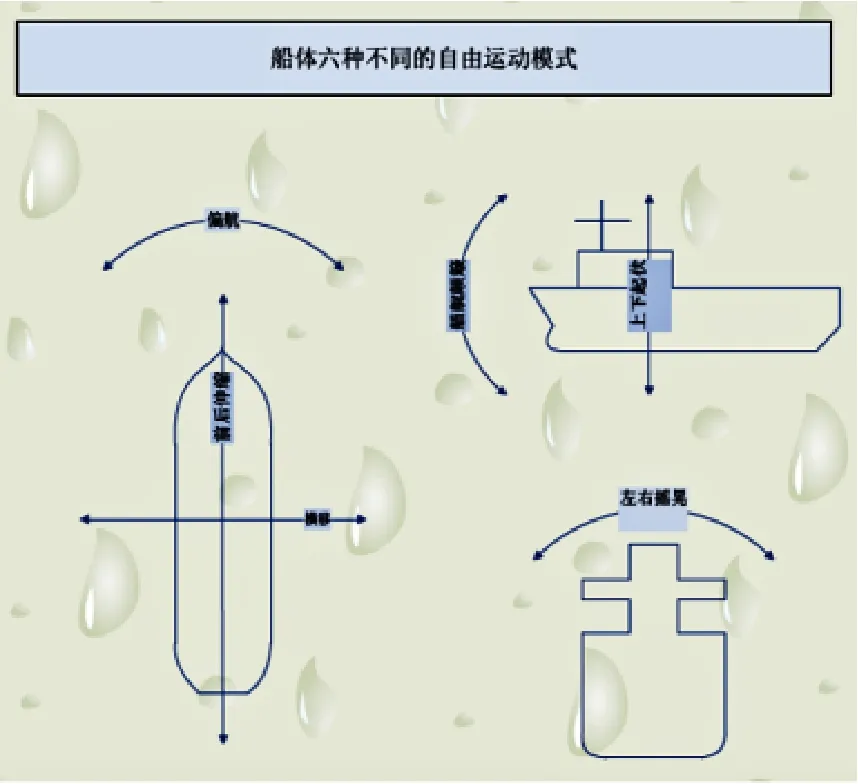
图2
各种原因产生的这一系列误差影响能直接通过其他仪器测量到,DP控制电脑通过补偿方式可以将船位和艏向控制在可以接受的范围内。譬如通过风向风速仪连续测量风力,DP控制电脑可以补偿风的影响。其他的如电缆敷设时的张力影响,对外消防系统运转时的反向推力影响等都可以通过仪器测量数据后由控制电脑来补偿修正。
除了保持船位和艏向,DP系统还可以自动完成单独改变船位或艏向,或同时改变船位和艏向。当船位处于稳定状态时,DP操作手可以通过控制操作面板上的按钮选择一个新的船位,设定移动速度来改变船位;同样,也可以通过输入新的艏向和转动速度来改变艏向;根据作业需要可以任意单独或同时改变船的位置和艏向。
某些 DP作业船如挖泥船,铺管船,电缆敷设船等需要按照预先设定的路线移动,DP操作手通过在 DP电脑里预置相关的转向点数据,可以很方便地做到这一点。另外有时如使用ROV(水下机器人)作业时,因为ROV一直处于移动状态中而不是在固定位置,DP操作手可以通过设定目标跟踪功能,让DP船和水下作业移动中的 ROV一直保持固定的距离,具体说就是如任意设定 DP船和 ROV之间的距离为 50米,当 ROV在水下往任意方向移动一米,DP船就会通过电脑控制推进系统自动往同样的方向移动一米,从而达到始终和ROV保持固定相对位置的目的。
4 动力定位(DP)操作证书取证
根据我对相关情况的了解,DP操作手培训一般分四个阶段:
1)参加和按要求完成一次经认可的 DP理论基础和认识培训(约一周);
2)依照航海协会DP值班记录本C部分的规定具备30天的海上DP熟悉经历;
3)参加和按要求完成经认可的 DP模拟操作培训(约一周);
4)在DP作业中按要求完成和记录6个月的DP操作经历并且附有所在船船长的评价;具体见 IMCA有关 DP操作手证书的相关规定。需要强调的是,在有船长签字的 DP记录本(DP LOG BOOK)上对受训者的有关评价也非常重要。
通常DP培训机构只是让学员做好准备以便在船上的DP操作中获得有关知识。所以即使是完全取得 DP操作证书以后其实对于 DP操作者来说还是需要不断地学习和积累。另外每一名DP受训者都会被要求保存一本DP记录本,这个记录本将记录整个培训过程和进展,包括了需要学习,理解和在不同阶段的实际应用问题。其中按要求参加和完成 DP基础理论认识和模拟培训是取证的必须要求。为取得证书参加的 DP操作值班经历由所在DP船的船长鉴定后将被记录在DP操作记录本里。在完成记录本 F部分的有关要求后船长将把受训者推荐给负责DP发证的有关组织,并附上认为受训者已具备在 DP船上进行DP值班的恰当的声明以取得证书。如果该船长没有持有 DP操作证书的话有必要让一名持证的 DP操作手在这部分写上认可意见和批注。无论是鉴定DP记录本还是推荐DP受训者,这两者中的任何人都要对受训者已具备成为 DP操作手的能力完全感到满意和认可。最后这类培训最好也要有公司制定 DP培训专家的认可和签注,这对 DP操作手及早取得相关操作证书会有很大的帮助。
DP操作手在 DP I船上任职获得的 DP证书将会备注为“受限级”。如要取消“受限级”的备注就需要做:
1)最少具备在DP II或III船上3个月以上或同等的DP值班经历,通常2个月在DP I船上的DP值班经历可以等同于1个月在 DP II或 III船上的 DP值班经历。但是这个时间规定必须包括2个月实际在DP II或III船上DP运转时涉及的和DP操作有关的时间。
2)另外有关的工程师必须按要求完成和持有高压电电工操作培训证书。
5 结束语
动力定位技术在我们国家的起步和使用相对较晚,目前和国际上部分地区在技术和使用上我们还有不小的差距,笔者很想通过这样的方式,来介绍和普及DP知识,让更多有志于DP作业的同行和朋友一起来探讨和参与,共同来推动 DP技术和实际运用在我们国家进一步更好的发展。
IMCA M103 Rev.I December 2007------Guidelines for The Design and Operation of Dynamically Positioned Vessels
IMCA M109 Rev.I February 2004------A Guide to DP –Related Documentation For DP Vessels
IMCA M117 Rev.I February 2006------The Training and Experience of Key DP Personnel
IMCA M154 Rev.I February 2006------Power Management System Study
113IMO(IMO MSC645)------IMO Guidelines For Vessels With Dynamic Positioning Systems
中国船级社《动力定位系统检验指南》2002版,人民交通出版社