一种基于卫星敏捷特性的在轨辐射定标方法
2013-10-11龙亮王中民
龙亮 王中民
(1 北京空间机电研究所,北京100076)
(2 中国长城工业集团有限公司,北京100054)
1 引言
为获得高品质的遥感图像,航天光学遥感相机需要进行相对辐射定标工作。目前在轨相对辐射定标主要通过利用专门的星上定标装置与观测地面定标场两种手段来实现。其中观测地面定标场的手段需要地面提供一个足够大(至少大于相机单景幅宽)且辐射特性均匀的定标场景。随着遥感卫星技术的发展,越来越多的卫星具备了较强的敏捷特性,对于有较强敏捷特性的推扫式成像光学遥感卫星,进行在轨相对辐射定标时,可以使用将相机绕卫星偏航轴旋转一定角度(通常约为90°)的方法来获取相对均匀图像的方法来进行不同像元间的非均匀性校正。这种在轨相对辐射定标方法基于遥感卫星的敏捷特性来完成,国外通常称之为“Side-slither”定标法。此种方法也是通过观测地面场景来实现在轨相对辐射定标,但对地面场景均与特性等要求大大降低,有利于提高在轨辐射定标效果。
2 Side-slither定标方法原理及优点
2.1 Side-slither定标方法原理
Side-slither定标方法原理图如图1所示。推扫式光学遥感相机在正常对地成像模式下,焦面探测线列与成像方向垂直; 而进行 Side-slither定标时,将焦面旋转约 90°,探测线列方向与成像方向平行,这样,在不考虑其它影响因素的情况下,理论上探测线列上每个像元都依次对同样的地面区域成像。而Side-slither定标时焦面探测线列输出得到的图像中,每个像元获得的辐射能量信息是一样的,这样就相当于满足了相对辐射定标所需要的给焦面探测线列提供均匀辐照度场的条件,在此基础上进行焦面像元非均匀性校正工作。

图1 Side-slither定标方法原理Fig.1 Theory of Side-slither calibration method
2.2 Side-slither定标方法优点
Side-slither在轨相对辐射定标法相比于传统在轨相对辐射定标方法,优点如下:
1)理论上Side-slither定标时由于探测线列上的所有像元都对相同的地面区域成像,任何地物都可以用来当作定标地物。尽管考虑其它因素的影响使得定标地物的选取不可能是完全随意,但相比起传统的使用地面定标场的方法(此种方法进行辐射定标时,成像线列依然处于正常对地成像模式下的线列推扫方式),Side-slither定标方法对定标场地的要求明显降低。
2)Side-slither定标方法充分利用卫星自身的敏捷特性,不需要额外的定标机构,相比于使用星上定标装置的定标方法,减少了卫星平台及载荷的负担。
3 Side-slither定标方法应用实例
目前,随着TDICCD(Time-Delayed Integration Charge Coupled Device)在航天光学遥感领域的广泛使用,航天光学遥感器已经很少使用单一的线阵CCD用于遥感成像。但TDICCD可以看做是一种“多级”线阵CCD,其使用原理同线阵CCD相同。根据实际调研,目前成功使用或预备使用Side-slither定标方法的光学遥感卫星都是以TDICCD作为焦面探测器[1]。
(1) Ikonos-2
1999年9 月24 日,美国发射的 Ikonos-2 卫星上搭载了“全色-多光谱”型光学遥感相机,该相机星下点分辨率约为0.8m/3.2m,覆盖宽度约为13km。Ikonos-2在轨运行至今,期间进行了多次Side-slither定标,其Side-slither定标方法如图2所示。为了满足多谱段探测器动态范围内多点非均匀性校正的要求,Ikonos-2的Side-slither定标选取了多种类型的定标地物,如图3所示。不同类型的定标地物在各谱段上的辐射能量分布以及全色谱段上的辐射总能量上不尽相同[1]。
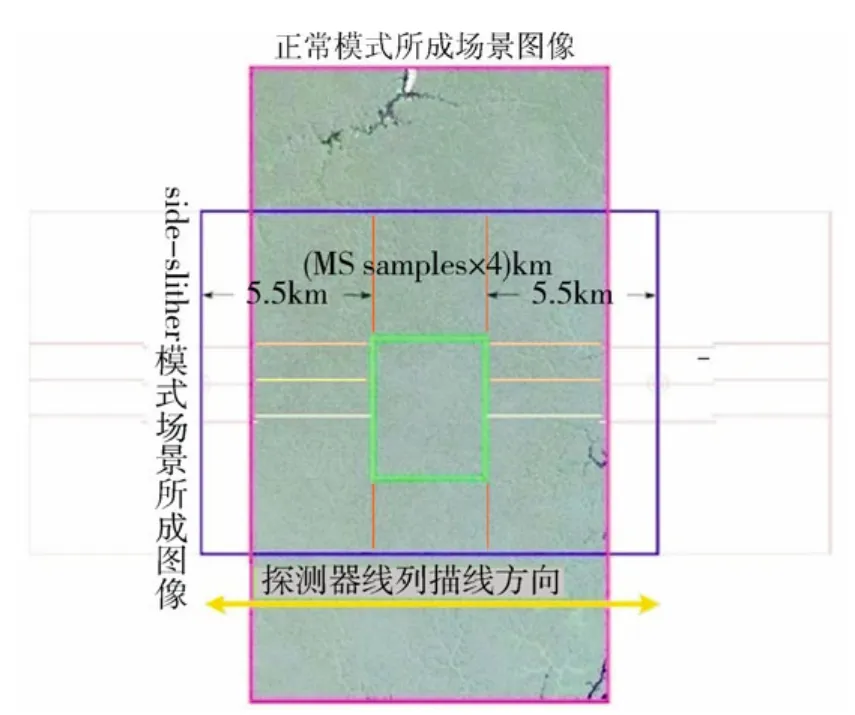
图2 Ikonos-2 Side-slither定标示意Fig. 2 The Side-slither calibration of Ikonos-2 satellite

图3 Ikonos-2 Side-slither定标典型地物选取Fig. 3 Various uniform calibration scenes of Ikonos-2 satellite
Ikonos-2在轨期间的Side-slither定标,除了以地球为定标参考体外,还进行了以月球表面为定标参考体的Side-slither定标(Lunar Side-slither),如图4所示。图4中,红、绿、蓝3种颜色的线条分别代表Ikonos-2焦面多光谱TDICCD阵列、前向全色TDICCD阵列、后向全色TDICCD阵列。图4显示了某一次Lunar Side-slither定标时,3个焦平面阵列之间相对位置关系,以及它们与月面的相对位置关系[2]。
(2) Quickbird-2
美国的Quickbird-2卫星于2011年10月18日成功发射,Quickbird-2上的光学遥感相机为“全色-多光谱”型相机,星下点分辨率约为0.6m/2.4m,覆盖宽度约为16.5km。Quickbird-2的光学遥感相机同Ikonos-2上的属于同一类型相机,各项性能指标也较为接近。其在轨进入任务运行阶段期间,也多次采用 Side-slither定标对不同类型地物进行成像,获取的均匀图像用于相对辐射定标[3-5]。图 5所示为Quickbird-2在轨获取的一幅Side-slither定标图像,图中左侧部分图像为原始的定标图像,两条黑粗线的之间的图像用于后续定标工作,该部分图像对应地面幅宽12km,对应全色(PAN)谱段有20 000列图像,多光谱(MS)谱段有5 000列图像,图中右侧部分图像为对左侧两黑粗线间图像的放大图。
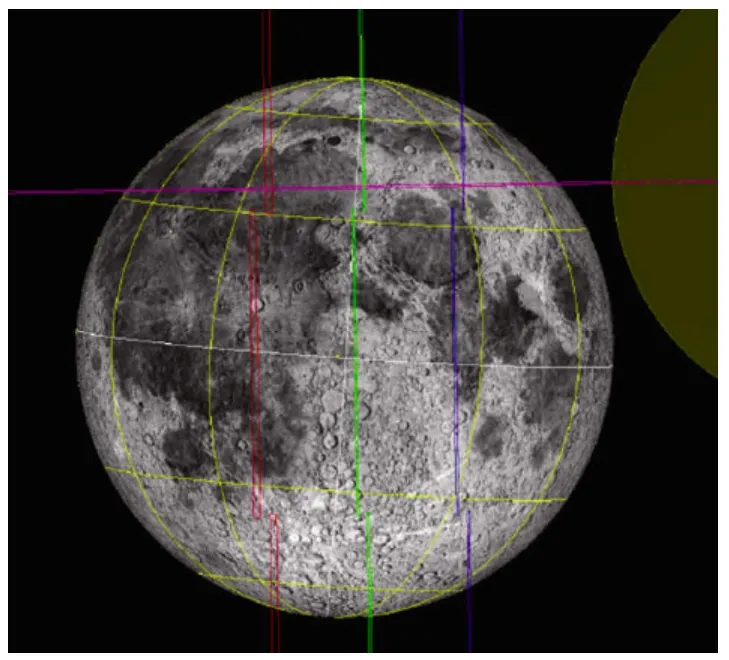
图4 Lunar Side-slither定标示意Fig. 4 The Lunar Side-slither calibration

图5 Quickbird-2获取的Side-slither定标图像Fig. 5 A Side-slither calibration image of Quickbird-2 satellite
(3) RapidEye
RapidEye是由德国RapidEye AG公司运营并提供地理空间信息服务的高空间分辨率商业卫星星座。该卫星星座于2008年8月29日成功发射,星座由5颗均匀分布在太阳同步轨道内的RapidEye卫星组成。2011年 3月到7月之间,RapidEye采用Side-slither定标方法对其所携带的推扫式多光谱成像仪(MSI)进行了相对辐射定标,焦面探测像元的非均匀性得到了很好的校正[6-7]。图6所示为RapidEye在轨获取的两幅Side-slither定标图像,左侧一幅拍摄地点是沙特阿拉伯,时间为2011年3月15日,右侧一幅拍摄地点为格陵兰岛,时间是2011年7月7日,图中红框内图像用于后续数据处理。
(4) Landsat-8的OLI(Operational Land Imager)
Landsat-8属于美国陆地数据连续任务(LDCM),是美国LandSat系列卫星的第八颗,于 2013年 2月 11日发射。Landsat-8上所携带的OLI探测谱段覆盖可见光、近红外以及短波红外谱段。全色(500~680nm)成像分辨率为 15m,多光谱谱段成像分辨率为30m。OLI发射入轨后拟采取多种定标方法来进行定标工作: 通过漫反射板反射阳光、使用星上自带的定标灯、使用Side-slither的方法等。其中Side-slither定标法主要作为前两种方法的补充[8]。
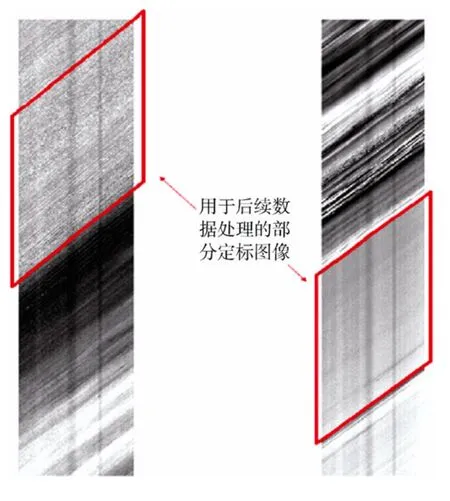
图6 RapidEye获取的Side-slither定标图像Fig.6 Side-slither calibration images of RapidEye satellite
由以上的实例可以看出,目前对Side-slither定标的应用,通常是将其作为基于传统地面定标场相对辐射定标方法的替代,或者为了获得较好的焦面非均匀性校正效果,将其作为基于星上定标源、基于漫反射板等高精度在轨定标方法的补充。
4 Side-slither定标的影响因素分析
基于Side-slither的定标方法,在使用时应具备两个前提条件: 1)卫星平台具备使相机绕卫星偏航轴旋转一定角度(通常为90°)的能力; 2)相机对地成像是采用线阵探测器推扫成像的方式。而满足两个前提条件后,在具体实施Side-slither定标的过程中,仍会存在诸多影响定标效果的不利因素。如何消除或减小这些因素的影响,对于最终获得较好的定标效果至关重要。本文主要以Quickbird-2为例,分析这些因素对其Side-slither定标的影响。
Quickbird-2卫星主要参数如表1所示。

表1 Quickbird-2卫星主要参数指标Tab.1 Main parameters of Quickbird-2 satellite


图7 Side-slither定标时序示意Fig.7 The sequence of Side-slither calibration
4.1 地球自转对Side-slither定标的影响
由于地球自转,各个纬度地区存在不同的线速度,其方向同卫星飞行方向成一定夹角(对于 Quickbird-2来说是97.2°),如图8所示,Vsat_earth为卫星地面飞行速度矢量,Vearth为地球自转线速度矢量,V1与V2为Vearth两个互相垂直的速度分量。如果Side-slither定标时是将相机旋转90°使CCD线列沿卫星飞行方向去进行成像,则定标时线列成像方向同实际像移方向是不一致的,如图9所示。因此,在一次理论Side-slither定标过程中(定标时间设为2.28s),如果定标地物选择在赤道地区(如撒哈拉沙漠),赤道地区地球自转线速度约为 464m/s,那么完成这次定标时,线列中第一个像元的地面成像区域同最后一个像元的地面成像区域相距大约为464m/s×cos7.2°×2.28s=1 050m; 而当定标场景为极地冰盖(纬度在80°左右)时,由于地球自转线速度相对很小,故进行同样时间的Side-slither定标,线列中第一个像元与最后一个像元的成像区域距离相比在赤道地区的成像距离也小很多。

图8 卫星地面飞行速度同地球自转速度关系示意Fig.8 The relationship between the ground speed of satellite and the speed of earth rotation
为了减小这种影响,可以采用类似于相机正常推扫成像模式中使用的“偏流角补偿”方法[9]用于Side-slither定标过程中的“偏流角补偿”(这里只讨论简单的星下点“偏流角”补偿)。具体而言,在其一个轨道周期中,偏流角用β表示,它是卫星飞行地面速度同地球在该地区线速度所合成速度 Vp( Vp的方向即实际像移方向)与之间的夹角,如图9所示。根据与轨道周期内不同星下点的不同大小的可求得在整个轨道周期内,不同纬度下对应偏流角的变化(如图10所示),经计算,Quickbird-2在赤道处的β≈3.7°。

图9 偏流角补偿示意图Fig.9 The scheme of drift angle compensation

图10 不同纬度下偏流角大小示意图Fig.10 The scheme of drift angle varies w ith latitudes
在将相机按偏航角调整90°的基础之上,再按该时刻的偏流角旋转相应的角度β,使得CCD线列沿着实际像移方向成像,这样就能大大减小地球自转对定标所造成的影响。
需要说明的是,卫星在执行正常推扫成像的过程中,为了减小地球自转所带来的影响,在进行偏流角补偿的同时,也会实时对CCD积分时间作出修正。而进行Side-slither定标时,不要求电荷转移速度同像移速度匹配,只需保证一列像元中每个像元的积分时间一致即可,不需要对积分时间作出修正。所以,针对地球自转对Side-slither定标带来的影响,可以通过定标时对相机作出类似偏流角补偿的适当调整,可以最大限度减小其对定标的不利影响。
4.2 光学系统照度不均匀性对Side-slither定标的影响
Side-slither定标方法同大多数相对辐射定标方法一样,通过为焦面CCD提供一个均匀的辐照度场来完成像元的非均匀性校正。该均匀辐照度场的最终生成,不仅和辐射源有关,还同光学系统的成像品质有关。一般来说,在不存在斜光束渐晕,且光束孔径角较小的情况下,光学系统的轴外像点的光照度E′同轴上点光照度0E′有如下关系

式中 ω′为像方视场角,如图11所示。图11中l0为光学系统出瞳到像面的距离,Ad为像面上一微元。由于E′与0E′大小存在差异,所以光学系统成像的照度不均匀性会对Side-slither定标产生影响。
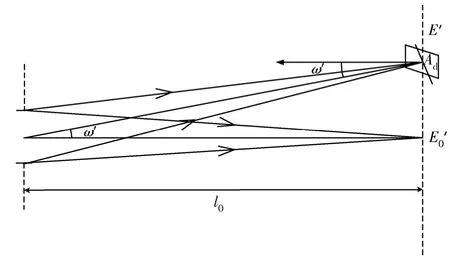
图11 光学系统轴上轴外像点照度关系示意Fig.11 The image irradiance on-axis and off-axis in optical system
Quickbird-2的光学系统物方视场角约为 2.12°×0.4°,光学系统形式为离轴三反式。经过对其光学系统的仿真分析,其像面在互相垂直的两个方向上的归一化光照度分布如图12所示。

图12 正常推扫成像模式中垂直轨道与沿轨视场方向像面归一化照度分布Fig. 12 The normalization imge irradiance w ith the field of view across and along the orbit in normal push-imaging mode
图12 中垂直轨道方向边缘视场(1.06°)同中心视场(0°)相比归一化相对辐照度降低了约1%; 沿轨视场方向边缘视场(0.2°)同中心视场(0°)相比照度降低了约 0.3%。故不论 Quickbird-2是处于正常推扫成像模式,抑或进行 Side-slither定标,光学系统会对像面照度均匀性产生影响。由于Quickbird-2光学系统物方视场角不大(像方视场角也不大),故光学系统照度不均匀性对Side-slither定标影响并不大。但对于视场更大的光学系统,这种影响可能会加大,必须予以考虑。
4.3 焦面CCD阵列的拼接及排布对Side-slither定标的影响
为了满足相机视场覆盖的要求,航天光学遥感相机的焦面通常采用 CCD拼接技术。Quickbird-2的焦面如图13所示,其CCD阵列采用的是视场拼接技术,6片全色TDICCD以及6片多光谱线阵CCD(每片上含4列)分别进行视场拼接。
Side-slither定标要求同一线列上的探测像元对同一地物成像。而Quickbird-2同一谱段所有探测像元由多个线列在两条平行线上(理论上)的视场拼接而成,要对该谱段所有像元进行Side-slither定标,则要求两条平行线列上的成像地物相同,这对定标地物在一定范围内的辐射均匀性提出了要求。
例如,要对 Quickbird-2多光谱谱段中的可见光红光谱段(0.45~0.52μm)进行 Side-slither定标,由于视场拼接造成红光谱段相邻两线列在X方向上(见图13)距离约为12mm,对应的地面距离约为1 125m。也就是说,对其进行Side-slither定标,理论上至少需要如图14所示的一个场景,场景的两侧有辐射特性相同的地物。而实际应用中一般都是以整个场景(宽度大于1 125m)的辐射均匀性来满足定标需求。

图13 Quickbird-2焦面CCD阵列分布示意Fig.13 The focal plane CCD array layout of Quickbird-2 satellite camera

图14 由焦面视场拼接造成定标场景需求的理论分析Fig.14 The theoretical analysis of demand for calibration scene caused by focal plane field butting
4.4 卫星姿态精度对Side-slither定标的影响
对于航天光学遥感卫星,卫星平台的姿态精度对成像品质会有影响[10],而这同样会给Side-slither定标带来相应的影响。卫星平台的姿态精度一般分为平台指向精度与姿态稳定度。对于平台指向精度而言,俯仰角与滚动角指向的小范围偏差不会直接影响Side-slither定标时使线列观测同一地物的需求,只会造成对事先选定地物的观测偏差(这实际上也会影响最终的定标效果)。而偏航角指向偏差会对线列上所有像元观测同一地物造成直接影响,这种影响同 4.1节中所涉及的偏流角所造成的影响类似。平台的姿态稳定度在卫星3个姿态方向对Side-slither定标的影响与指向精度在这3个方向的影响性质一致,只是其影响程度同定标持续时间密切相关。
卫星姿态精度对Side-slither定标的影响较为复杂且具有随机性,这里不再深入分析。通常,通过选用更大尺寸的均匀定标场景可以减小该影响(在垂直于卫星飞行方向上增大尺寸是为了确保定标时进入CCD的辐射均来自于定标场景; 在平行于卫星飞行方向上增大尺寸主要是为了增加定标时间,使得一次定标中每个像元有更多的定标信号叠加,从统计概率的角度减小定标的误差,典型的如Quickbird-2沿卫星飞行方向的定标场景尺寸给出了12km)。
需要说明的是,光学系统照度不均匀性、焦面 CCD阵列拼接排布特性、卫星姿态精度均属于卫星自身的固有属性,对定标造成的影响无法或难以通过卫星自身调整来减小,只能对其影响进行定量评估后,从其它方面(如选择更大且均匀性更高的定标场景)补偿它们对定标产生的不利影响。
4.5 定标场景辐射特性对Side-slither定标的影响
为了使得定标地物(场景)能够比较全面的覆盖焦面探测像元的响应范围,在进行 Side-slither定标时通常选取多种类型的地物作为定标场景,如干涸的湖床、热带雨林、极地冰盖、沙漠等(如图 3所示)。实际上这与传统场地定标的场景选取原则是一致的。沙漠和极地地区等发射(反射)辐亮度较高场景特别适合探测器动态范围靠近顶端(高端)一侧的定标; 而辐亮度较低的场景相对比较难以获取,如低辐亮度的植被,其辐射特性会随季节变化,而选海水(河水)作为低辐亮度的定标场景,还需要有合适的风力、太阳高度角等条件。
Ikonos-2为了获得辐亮度较低的均匀定标场景,在探测器动态范围接近于底端(低端)的部分使用月球作为定标场景进行Side-slither定标。选用月球作为定标场景的好处主要有3点:
1)整个月面都可以作为一个具有低辐亮度的定标场景;
2)定标时基本上可以忽略大气环境变化的影响;
3)定标工作在轨道阴影区或过地球两极时开展,不会和正常的数据采集工作任务时间段冲突。
5 结束语
通过对Side-slither定标的影响因素分析以及Side-slither定标的应用实例来看,航天光学遥感相机在轨进行 Side-slither相对辐射定标时,所选用的定标地物并非 Side-slither定标原理上所允许的“任何地物”,定标地物(场景)选取的重要原则之一依然是其本身的辐射信息均匀性,并且需根据各种影响因素综合分析确定对定标地物(场景)的具体约束条件,以达到较高的定标精度以及良好定标效果。相对于其它在轨定标方式,Side-slither定标由于不需专门的星上定标装置、并且对地面定标场景要求较低等优势使得其得到了很好的应用。而随着航天遥感技术的发展,为了获取更高品质的遥感图像,这种定标技术将得到更多更好的应用。
References)
[1]Taylor M H.Ikonos Radiometric Calibration and Performance after 5 Years on Orbit[R].CALCON Technical Conference, Logan,UT, 2005: 7–15.
[2]Taylor M H. Lunar Side Slither: A Novel Approach for IKONOS Relative Calibration[R].CALCON Technical Conference,Logan, UT, 2007: 5–18.
[3]Henderson B G, Krause K S. Relative Radiometric Correction of QuickBird Imagery Using the Sideslither Technique on-orbit[J]. Proc. of SPIE, 2004, 5542: 426–435.
[4]Krause K S. Relative Radiometric Characterization and Performance of the QuickBird High-resolution Commercial Imaging Satellite[J]. Proc. of SPIE, 2004, 5542: 35–43.
[5]Krause K S. QuickBird Relative Radiometric Performance and On-orbit Long Term Trending[J]. Proc. of SPIE, 2006, 6296,6296P: 1–11.
[6]Cody Anderson, Denis Naughton, Andreas Brunn, et al. Radiometric Correction of RapidEye Imagery Using the On-orbit Side-slither Method[J]. Proc. of SPIE, 2011, 818008: 1–13.
[7]Steyn J, Beckett K, YOSHI Hashida, et al. RapidEye Constellation Relative Radiometric Accuracy Measurement Using Lunar Images[J]. Proc. of SPIE, 2009, 7474, 74740Y: 1–11.
[8]Markham B L, Dabney P W, Knight E J, et al. The Landsat Data Continuity M ission Operational Land Imager (OLI) Radiometric Calibration[R]. Goddard Space Flight Center, NASA, 2010: 1–4.
[9]袁孝康. 星载TDICCD推扫相机的偏流角计算与补偿[J]. 上海航天, 2006(6): 10–15.YUAN Xiaokang.Calculation and Compensation for the Deviant Angle of Satellite Borne TDI-CCD Push Scan Camera[J].Aerospace Shanghai, 2006(6): 10–15.(in Chinese)
[10]龙夫年, 张旺, 刘建峰. 卫星姿态精度对TDICCD相机的影响[J]. 哈尔滨工业大学学报, 2002, 34(3): 382–384.LONG Funian, ZHANG Wang, LIU Jianfeng. Effect of Satellite Attitude Control Accuracy on TDI-CCD Cameras[J].Journal of Harbin Institute of Technology, 2002, 34(3): 382–384. (in Chinese)