轿车操纵稳定性的虚拟试验研究
2013-10-10冯金芝胡学坤郑松林刘新田
冯金芝, 胡学坤, 郑松林, 刘新田
(1.上海理工大学 机械工程学院,上海 200093;2.盐城市车辆综合性能检测站,盐城 224000)
汽车的操纵稳定性不仅影响汽车驾驶的方便程度,也是决定汽车安全高速行驶的主要性能指标,所以人们称之为“高速车辆的生命线”[1].车道路操纵稳定性试验具有相当程度的危险性,如蛇行试验、瞬态响应试验、均匀加速法稳态试验及其它的一些极限工况的试验,由于车速很高,并且车辆中尚可能存在未被发现的缺陷及隐患,以至于造成试验人员的人身伤害甚至死亡[2].虚拟样机技术可以在各种虚拟环境中真实地模拟产品整体的运动及受力情况等,快速分析多种设计方案.虚拟样机技术的出现为汽车操纵稳定性试验提供了很好地解决途径,虚拟试验可以在一定程度上替代实车道路试验,在某些方面具有实车测试无法比拟的优点:可重复测试;易获取测量数据,数值的精确性高;测试过程具有可再现性;可以避免高车速及极限工况试验的危险性;试验周期缩短,试验成本降低等[3-4].
1 整车动力学模型
如图1所示,整车装配模型主要由前后悬架系统、转向系统、动力传动系统、制动系统、车身系统、前后轮胎系统构成.各系统装配过程中,关键是通讯器的连接,它是一种基于模板模型的关键元素,用于子系统、模板、试验台之间数据的相互传递.
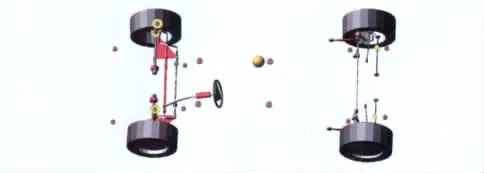
图1 整车动力学模型Fig.1 Vehicle dynamic model
整车模型中包括轮毂、转向节和轮心等139个输出通讯器,减震器副车架和转向横拉杆等159个输入通讯器.此外,轮胎的结构参数和力学特性对汽车操纵稳定性也有很重要的影响,本文选用Pacejka89轮胎模型,该模型具有很高的拟合精度[5].其它整车参数如表1所示.
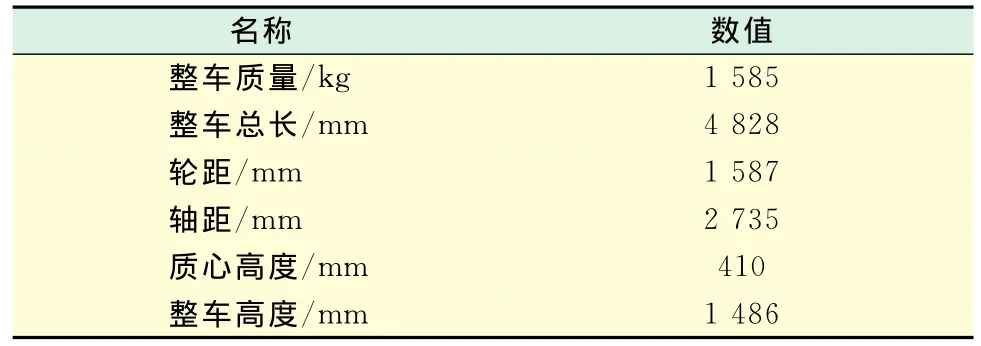
表1 整车相关参数Tab.1 Vehicle parameters
2 整车模型操纵稳定性仿真分析
依据现行整车操纵稳定性试验国家标准[6-7],对整车进行转向盘角阶跃输入、转向盘角脉冲输入、转向回正、稳态回转、转向轻便性和蛇行虚拟试验,各工况下的虚拟试验均在平整良好路面上进行.
2.1 稳态转向
采用定转向盘转角试验法:先让轿车沿半径为15m的圆周缓慢行驶,保持转向盘转角不变,使轿车缓慢而均匀地加速,纵向加速度小于0.25m/s2,当侧向加速度达到6.5m/s2时停止仿真.
在前轮转角一定的条件下,若令车速极低、侧向加速度接近于零时的转向半径为R0,而一定车速下有一定侧向加速度时的转向半径为R,则这两个半径之比R/R0可用于表征汽车的稳态响应.由图2所示的纵向车速u和横摆角速度ω随时间t的变化曲线,根据公式R=u/ω,得到图3所示的整车瞬态转弯半径R曲线.由图4所示的R/R0曲线可以看出,R/R0>1,即转向半径总大于R0,此车具有不足转向特性,因此稳态转向特性良好.

图2 纵向车速和横摆角速度曲线Fig.2 Curves of longitudinal velocity and yaw velocity

图3 整车瞬态转弯半径R曲线Fig.3 Transient turning radius Rof vehicle
2.2 转向盘角阶跃输入
转向盘角阶跃试验,车速取为最高车速的70%(四舍五入取10倍数值),按照稳态侧向加速度值1~3m/s2确定转向盘转角输入,从侧向加速度为1m/s2起,每间隔0.5m/s2进行一次仿真试验,从第2s开始进行角阶跃输入,起跃时间为0.1s,保持车速不变,仿真时间为8s,仿真分析按左右转方向进行.转向盘转角β1变化曲线如图5所示.目前常用此方法来测定汽车对转向盘转角输入的瞬态响应[8].
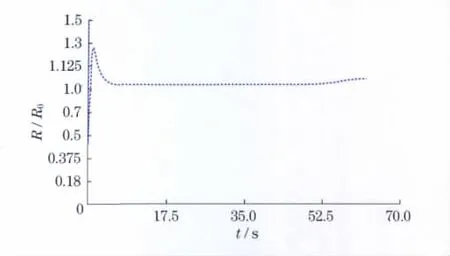
图4 R/R0曲线Fig.4 R/R0curve
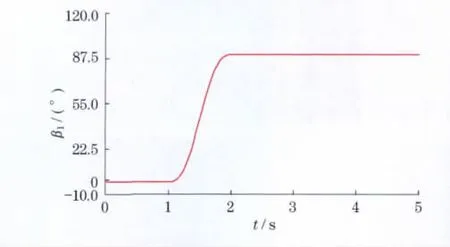
图5 阶跃输入转向盘转角变化曲线Fig.5 Varying curve of steering wheel angle under step input
依据GB/T 6323.2-1994,对于转向盘角阶跃输入试验,按横摆角速度在侧向加速度为0.2g时响应时间τ指标进行评价.汽车横摆角速度响应时间的评价计分式为

式中,τ100,τ60为汽车横摆角速度响应时间的上下限值,取为0.06,0.2s;由图6和图7所示的侧向加速度a及横摆角速度变化曲线,得τ=0.12s,其中横摆角速度响应时间为转向盘转角达到终值的50%的时刻作为时间坐标的原点,该点到所测变量过渡到新稳态值90%所需时间.由式(1)得Nτ=82.83分,由评价计分结果可以看出,汽车对转向盘转角输入的瞬态响应良好.
2.3 转向盘角脉冲输入
转向盘角脉冲输入试验通常用来确定汽车的频率特性.汽车直线行驶,在第2s时输入一宽度为0.8s的脉冲,使得汽车在过渡过程中,最大侧向加速度为4m/s2,仿真时间为6s,直到汽车恢复到直线行驶位置.转向盘转角变化曲线如图8所示.通过图8及图9所示的横摆角速度变化经过傅里叶变化得到图10(见下页)横摆角速度/转向盘转角幅频和相频特性曲线.
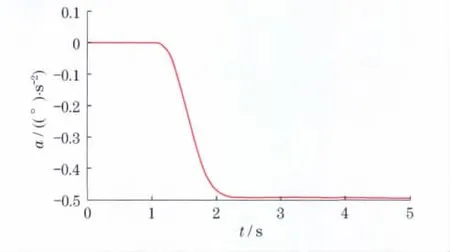
图6 侧向加速度变化曲线Fig.6 Varying curve of lateral acceleration
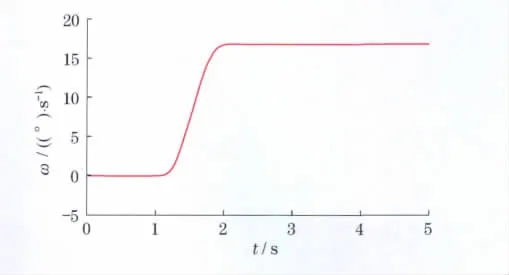
图7 横摆角速度变化曲线Fig.7 Yaw velocity

图8 角脉冲输入转向盘转角变化曲线Fig.8 Varying curve of steering wheel angle under angle impulse input
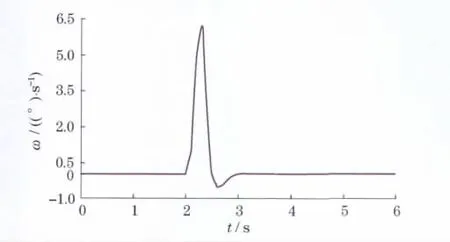
图9 角脉冲输入横摆角速度变化曲线Fig.9 Varying curve of yaw velocity under angle impulse input
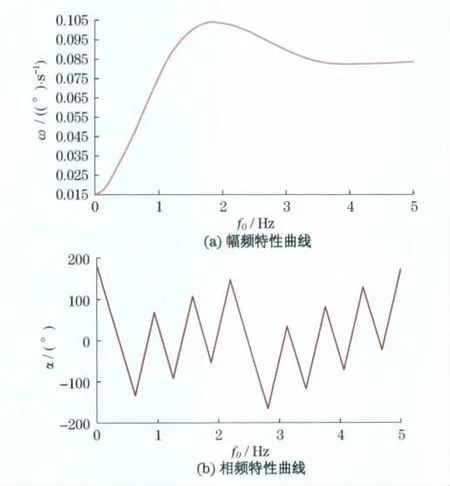
图10 横摆角速度/转向盘转角幅频和相频特性曲线Fig.10 Amplitude-frequency and phase-frequency characteristics of yaw velocity/steering wheel angle
依据 QC/T 480-1999(中华人民共和国汽车行业标准汽车操纵稳定性指标限值与评价方法),对于转向盘角脉冲试验,按谐振频率f、谐振峰水平D和相位滞后角α3项指标进行综合评价.
a.谐振频率的评分式为

式中,f100,f60为谐振频率的上下限值,取为1.3,0.7Hz;fp为转向盘转角脉冲输入试验中幅频特性谐振峰所对应的频率,根据图10(a)横摆角速度/转向盘转角幅频特性曲线可知fp=1.8Hz.由式(2)得,Nf>100,按100分计算,即Nf=100分.
b.谐振峰水平的评分式为

式中,由D=20lg(Ap/A0)可得,其中,Ap为f=fp处的横摆角速度增益;A0为f=0处的横摆角速度增益.可得D=3.84.D的上限值D100=2dB,下限值D60=5dB,即ND=75.5分.
c.相位滞后角的评分式为

式中,α为相应频率下相位滞后角的试验值,依据QC/T480-1999规定,试验车型在角脉冲试验中相位滞后角α取在输入频率为1Hz时的值.由图10(b)横摆角速度/转向盘转角相频特性曲线可得到α=30°.α的上限值α100为20°,下限值α60为60°,即Nα=90分.
d.转向盘角脉冲输入试验的综合评分式为

综合式(3)~式(5),可得NM=85.2分.由评价计分结果可以看出,该车动态特性良好.
2.4 蛇行路面
蛇行试验,汽车以35km/h的车速匀速直线行驶,然后通过事件建模器建立的蛇行试验路段,即依次穿越标杆,杆距为30m,增加车速(车速间隔为5km/h),重复试验进行10次,最高车速不超过80km/h,仿真过程中保持车速稳定.本次试验车速为65km/h,仿真时转向盘转角变化曲线如图11所示.
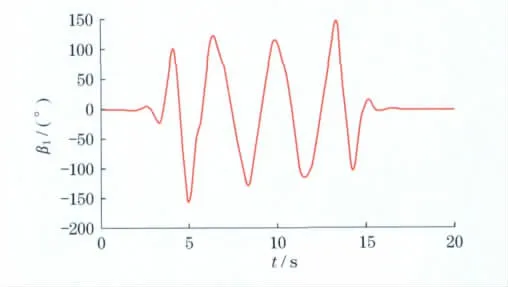
图11 蛇行仿真试验转向盘转角变化曲线Fig.11 Varying curve of steering wheel angle by pylon course slalom test
依据QC/T480-1999,对于蛇行试验,按基准车速下的平均横摆角速度峰值r与平均转向盘转角峰值θ进行综合评价.
a.平均横摆角速度峰值的评分式为

式中,r100,r60为平均横摆角速度峰值的上下限值,取为10和25.
由图12所示的蛇行仿真试验摆角速度变化曲线,可得横摆角速度绝对峰值平均值,经计算近似值r=18.5,即Nr=80分.
b.平均转向盘转角峰值的评分式为

式中,θ100,θ60为平均转向盘转角峰值的下上限值,取值为60和180.
由图11,可得基准车速下平均转向盘转角峰值的试验值的平均值,经计算近似值θ=89.4,即Nθ=90.2分.
c.蛇行试验的综合评分式为

综合式(6)~式(8),可得Ns=83.4分.由评价计分结果可以看出,该车随动性良好.

图12 蛇行仿真试验横摆角速度变化曲线Fig12 Varying curve of yaw velocity by pylon course slalom test
2.5 转向回正性
低速回正试验,先让汽车直线行驶30m,然后给转向盘一个角阶跃输入,使汽车进行侧向加速度为4m/s2的等速圆周运动,圆周半径为15m;汽车圆周行驶达到稳定状态后,突然释放转向盘,使汽车进入直线行驶状态,保持车速不变.
依据QC/T480-1999,对于转向回正性能试验,按松开转向盘3s时的残留横摆角速度绝对值Δr及横摆角速度总方差Er两项指标综合评价.
a.残留横摆角速度绝对值评分式为

式中,Δr100,Δr60为转向回正性试验残留横摆角速度绝对值上下限值,取为0和2.

图13 转向回正试验横摆角速度变化曲线Fig.13 Varying curve of yaw velocity by returnability test
由图13所示的转向回正试验横摆角速度变化曲线可得,松开转向盘3s时的残留横摆角速度绝对值Δr,经计算近似值Δr=0.92.即NΔr=81.6分.
b.横摆角速度总方差的评分式为

式中,Er100,Er60为转向回正性试验残留横摆角速度绝对值上下限值,取为0.3和0.6.
图14为转向盘作用力矩M变化曲线,以0.2s为间隔,在1~6s内取15个横摆角速度数值,利用式计算,其中rj为横摆角速度响应时间历程曲线瞬时值,r0为横摆角速度响应初始值,Δt为采样时间间隔.然后求得横摆角速度总方差Er=0.37,即NEr=91分.
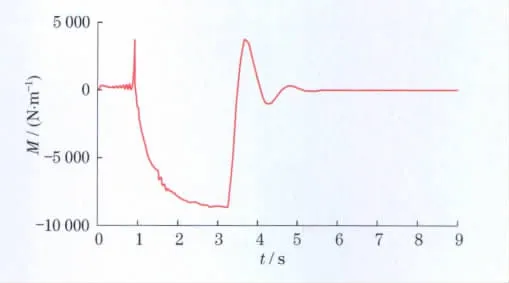
图14 转向盘作用力矩变化曲线Fig.14 Varying curve of steering wheel torque
c.转向回正性能试验的综合评分式为

综合式(9)~式(11),可得Ns=84.73分.由评价计分结果可以看出,该车转向回正性能良好.
2.6 转向轻便性
转向轻便性试验,汽车以10km/h的车速通过事件建模器建立的双纽线试验路段,汽车沿双纽线绕行一周至记录起始位置,即完成1次试验,共3次;行驶过程中,双纽线驱动文件来保证车速稳定和平稳的转动转向盘.转向轻便性试验是评价驾驶员操纵汽车转向盘轻重程度的一种方法,可以综合评价汽车行驶稳定性及乘坐舒适性.
依据QC/T 480-1999,对于转向轻便性试验,按转向盘平均作用力Fs与转向盘最大作用力Fmax两项指标进行综合评价.
a.转向盘平均作用力的评分式为

式中,Fs100,Fs60为转向盘平均作用力的上下限值,取为15和50.
根据图15转向盘力矩与转向盘转角关系曲线,绕双纽线路径一周的作用功可利用式W=得到,其中ΔM(θ)为绕双纽线一周的转向盘往返作用力矩之差与转向盘转角变化曲线处的数值,±θmax为转向盘向左右最大转角;转向盘平均摩擦力矩Ms由式Ms=得到;转向盘平均作用力由式得到,计算得Fs=21.8N,即NFs=92.2分.
b.转向盘最大作用力的评分式为

式中,Fmax100,Fmax60为转向盘最大作用力的上下限值,取为30和80.
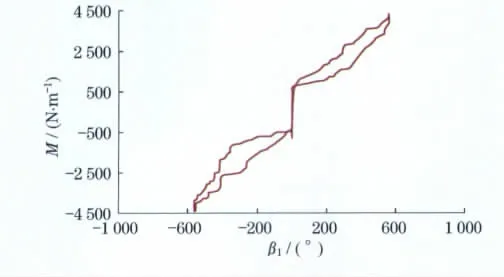
图15 转向盘力矩与转向盘转角关系曲线Fig.15 Relation curve of steering wheel torqueangle characteristic
由图16转向轻便性试验转向盘转角变化曲线,得到转向盘最大作用力矩值Mmax,通过式Fmax=2Mmax/D可得,Fmax=40.2,即NFmax=91.7分.
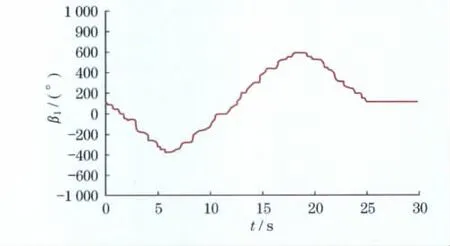
图16 转向轻便性试验转向盘转角变化曲线Fig.16 Varying curve of steering wheel angle by steering efforts test
c.转向轻便性试验的综合评分式为

综合式(12)~式(14),可得Ns=92.1分.其中ηF=0.6+0.08Ga,Ga为汽车最大总质量.由评价计分结果可以看出,该车转向轻便性良好.
综上得出该车操稳性性能试验综合评分分值与主观评价如表2所示.
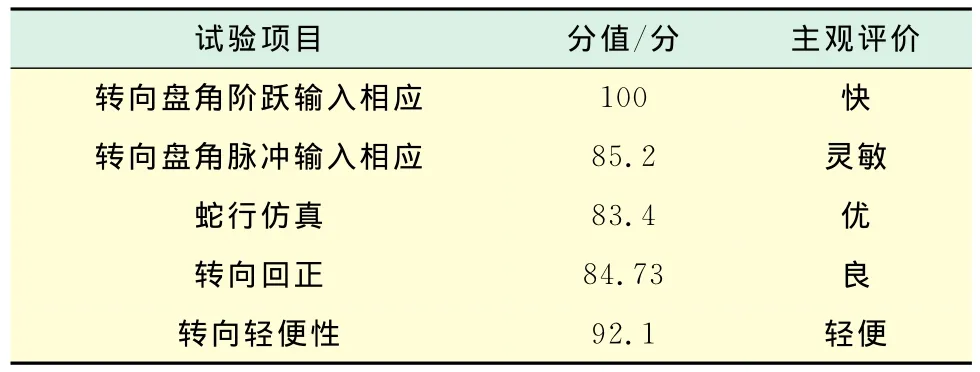
表2 操稳性性能试验评分分值与主观评价对比Tab.2 Comparison between the handling stability test results and vehicle subjective assessment
3 结 论
基于多体动力学理论建立了整车的动力学仿真模型,通过事件建模器建立了蛇行路面事件文件和双纽线事件文件,分别用于蛇行虚拟试验和转向轻便型虚拟试验的驱动文件.依据国家标准进行了各工况下的虚拟试验并对各试验工况下性能指标进行了详细的计算与分析评价,综合各试验工况下的性能评价指标,该车操纵稳定性良好,这与评价工程师的主观感觉相吻合.
[1]余志生.汽车理论[M].北京:机械工业出版社,2006.
[2]徐进.汽车制动及操纵稳定性的虚拟试验仿真[D].重庆:重庆交通大学,2006.
[3]陈立平,张云清,任伟群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[4]陈德民,槐创锋,张克涛.精通 ADAMS 2005//2007虚拟样机技术[M].北京:化学工业出版社,2010.
[5]陈军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008.
[6]国家技术监督局.GB/T6323-1994,汽车操纵稳定性试验方法[S].北京:国际出版社,1994.
[7]国家技术监督局.QC/T480-1999汽车操纵稳定性指标限值与评价方法[S].北京:国际出版社,1999.
[8]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991.
