无轴承异步电机最小二乘支持向量机逆解耦控制
2013-10-09杨泽斌孙晓东张新华朱熀秋刘贤兴
杨泽斌,孙晓东,张新华,朱熀秋,刘贤兴
(1.江苏大学电气信息工程学院,江苏镇江212013;2.江苏大学汽车工程研究院,江苏镇江212013)
无轴承异步电机(bearingless induction motor,BIM)集旋转与悬浮功能于一体,不仅具有传统异步电机的所有特点,而且还具有磁悬浮轴承无接触、无磨损、无需润滑、无污染、寿命长等优点,在高速、超高速特种电气传动领域具有广阔的应用前景[1-2].然而BIM具有十分复杂的电磁关系,其径向悬浮力、转速和磁链之间呈现出高度非线性和严重耦合性,大大降低了BIM系统在大范围内悬浮运行的稳定性及可靠性.为此,如何克服BIM系统内部非线性耦合对控制系统性能的影响,实现BIM多变量之间的高性能动态解耦控制,成为目前BIM研究的重点及难点.
文献[3]提出了一种近似线性化的控制策略来实现BIM径向悬浮力和电磁转矩之间的解耦控制,该方法计算量大,控制系统比较复杂;文献[4]采用矢量控制对BIM进行解耦控制,然而矢量控制只能实现径向悬浮力与转速之间的静态解耦,是一种稳态解耦控制方法;文献[5]采用微分几何方法实现了BIM二自由度径向位置的动态解耦控制,然而对于径向悬浮力与转速以及磁链之间的耦合特性,并没有给出有效的解决方法,并且微分几何方法需要转换到几何域中进行讨论,故数学工具比较复杂,不易掌握;文献[6]采用逆系统方法对BIM进行了解耦控制,克服了矢量控制只能实现静态解耦的不足,并且物理概念比较清晰直观,数学分析简洁明了,但是逆系统方法在实际应用中存在逆模型难以获得的瓶颈问题;文献[7]为了克服逆系统的不足,采用神经网络来辨识BIM的逆模型,解决了BIM逆模型难以求取的棘手问题,但是神经网络自身存在局部极点小、过学习、运算量大等缺陷,限制了神经网络逆方法的进一步应用.支持向量机(support vector machine,SVM)是在统计学习理论基础上发展起来的一种机器学习方法,很好地解决非线性、高维数、小样本、局部极小点等问题,具有较强的泛化能力[8].由Suykens等提出的最小二乘支持向量机(least squares support vector machine,LSSVM)是一种扩展的SVM,它是SVM在二次损失函数下的一种形式,只求解线性方程组,计算速度快,近年来在非线性系统建模和控制中获得了很好的应用.[9]
文中拟以一台4极转矩绕组,2极悬浮绕组的BIM为研究对象,在介绍其径向悬浮力产生原理的基础上,进行可逆性分析,利用LSSVM建立BIM的逆模型,并将其与BIM原控制系统相串联,实现BIM径向悬浮力、转速和磁链之间的动态线性化解耦,在此基础上,针对每个解耦子系统设计线性闭环控制器,最后进行仿真研究,验证文中所提解耦策略的有效性.
1 BIM工作原理及数学模型
图1为BIM空载情况下径向悬浮力产生原理图.BIM定子槽中嵌放着极对数PB=1的悬浮绕组和极对数PM=2的转矩绕组(文中下标B,M分别表示悬浮绕组和转矩绕组参数,下同),当2套绕组的极对数满足PB=PM±1时,2套绕组产生的磁场相互作用可以同时产生径向悬浮力和电磁转矩[10].设悬浮绕组和转矩绕组每相串联的有效匝数分别为NB和NM.在2套绕组中分别通入电流IB和IM,则产生2极磁链ψB和4极磁链ψM.当2套绕组通以如图1所示方向的电流,此时在上侧气隙ψB和ψM的方向相同,则气隙磁通密度增强,而在下侧气隙ψB和ψM的方向相反,则气隙磁通密度减弱,从而产生沿y正方向的径向悬浮力Fy;如果在悬浮绕组NB中通入相反方向的电流,则可产生沿y反方向的径向悬浮力.同理,沿x方向的径向悬浮力可以通过在悬浮绕组NB中通入与IB垂直的电流获得.
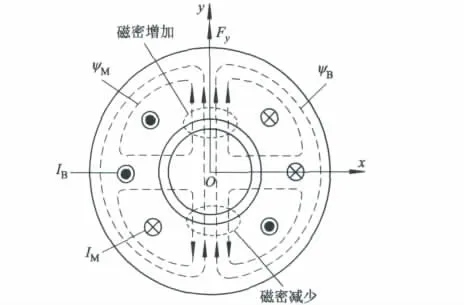
图1 BIM径向悬浮力原理图
BIM的电感矩阵L可以表示为
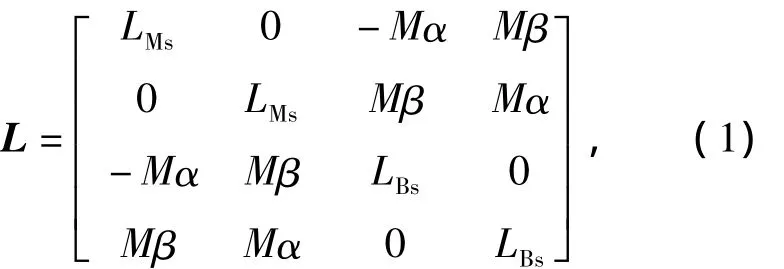
式中:α和β分别为转子在x和y方向的径向位移;LMs和LBs分别为转矩绕组和悬浮绕组的自感;M为2套绕组的互感系数,表示为

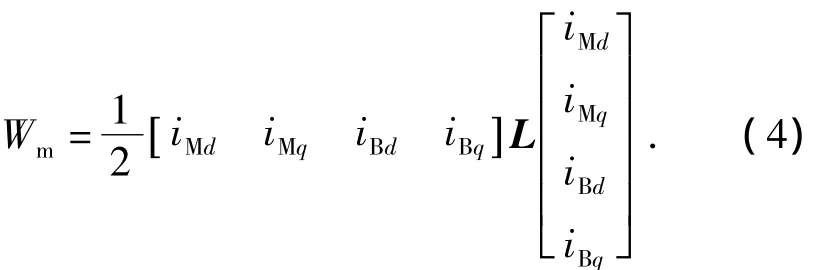
式中:μ0为空气磁导率;g0为气隙长度;R为转子半径;l为转子轴向长度.由能量转换关系可得BIM的磁场储能表达式为

式中:i= [iiii]T为BIM两套绕组定子
MdMqBdBq电流矩阵;iMd,iMq分别为转矩绕组电流在d,q轴上的分量;iBd,iBq分别为悬浮绕组电流在d,q轴上的分量.将变量代入式(3)可得磁能表达式为
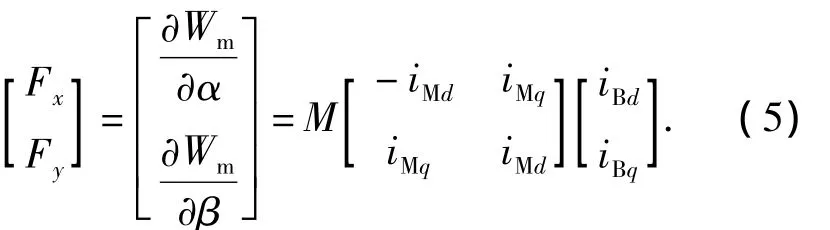
若忽略磁饱和,由虚位移原理,BIM径向悬浮力可表示为电磁储能对径向位移的偏导,因而BIM径向悬浮力Fx和Fy可以表示为
BIM中悬浮绕组与转矩绕组磁链相互作用,产生电机旋转与悬浮的电磁力.但是,与转矩绕组产生的磁场相比,悬浮绕组产生的磁场可以忽略不计,因此在忽略悬浮绕组产生磁场影响的前提下,BIM的转子磁链和电磁转矩满足如下方程:
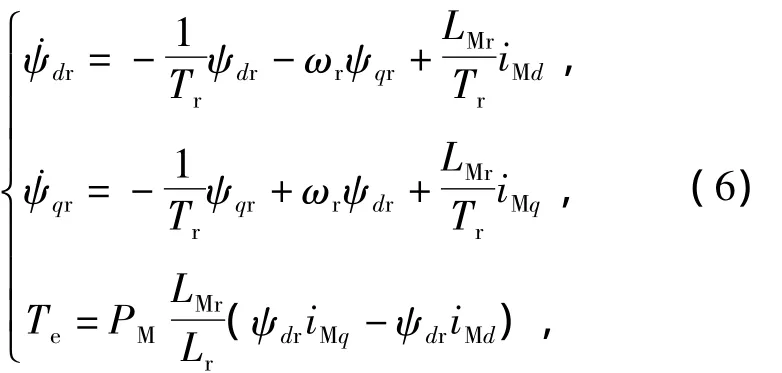
式中:ψdr,ψqr分别为 BIM 转子磁链在d,q轴上的分量;Te为电磁转矩;Tr为转子时间常数;ωr为转子角速度;LMr为转矩绕组与转子的互感;Lr为转子自感.
2 径向悬浮力模型
当BIM悬浮运行时,其转子的运动方程为
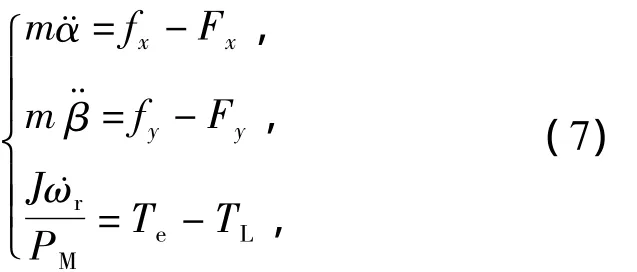
式中:m为转子质量;TL为负载转矩;J为转动惯量;fx=ksα,fy=ksβ分别为当转子偏离定子中心时的外界力;ks为位移刚度.
选取状态变量为

输入变量为

输出变量为

BIM的状态方程为
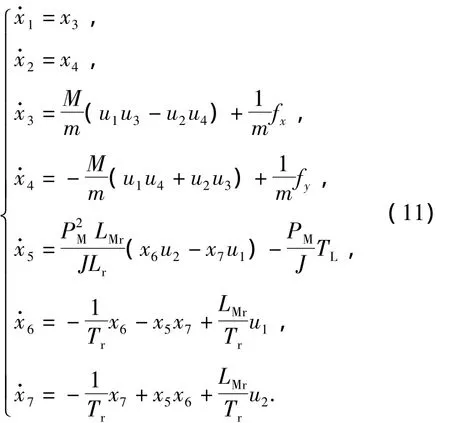
对BIM进行可逆性分析,首先对各输出变量求导直至方程中显含输入变量.由式(11)可得
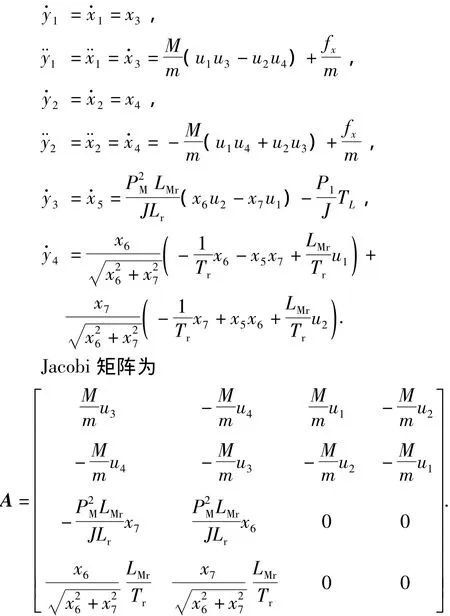
由于Det(A)≠0,又因为BIM系统的相对阶数
4 α =(2,2,1,1),且 ∑i=1αi=6<7,所以BIM状态方程的逆系统存在.由隐函数定理可得,逆系统可表示为

3 BIM的LSSVM逆解耦控制
3.1 LSSVM回归原理
LSSVM回归原理是选择函数y(x)=ωTφ(x)+b对未知函数进行估计,其中,xi∈Rm为权向量,b∈R为偏置值,非线性映射φ(x)将n组训练样本(xi,yi)(i=1,2,…,n)从原空间映射到高维特征空间.LSSVM的训练可通过求解如下优化问题来完成:

式中:γ为正则化参数;εi为不敏感损失函数的松弛因子.
引入拉格朗日乘子ai,求解式(13)的优化问题,得出
式中:ω =(ε1,ε2,…εn)T,a=(a1,a2,…an)T.根据Karush-Kuhn-Tucker条件,对拉格朗日函数 ω,a,b,ε分别求偏导,可将优化问题转化为以下线性方程组的求解问题
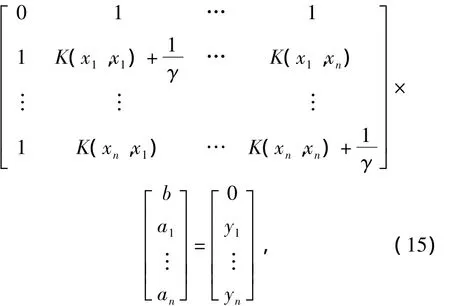
式中:K(xi,yj)为满足Mercer条件的核函数,核函数主要形式有径向基函数(RBF)、多项式Sigmoid函数等.鉴于RBF核函数的优点,文中选择RBF核函数为

式中:σ为核宽度.利用式(15)求解a与b,再由式(14)求出ω,最后就可得出(xi,yi)的拟合方程为

3.2 LSSVM逆解耦控制
采用LSSVM逆方法对BIM进行非线性动态解耦控制的步骤如下:
1)采样BIM的4路电流信号作为输入,二自由度径向位移、转速与磁链作为输出;然后采用高精度5点数值算法求取径向位移的一、二阶导数,转速和磁链的一阶导数,从而构成训练样本集和.由于在实际应用中,采样获得的数据不在一个数量级,为此将数据进行规范化处理.
2)LSSVM辨识的模型在很大程度上取决于正则化参数γ和核宽度σ的选取,因此为了提高BIM逆模型的建模精度和鲁棒性,采用自适应遗传算法对参数γ和σ进行优化,最后得到优化后的参数为:γ =1 800,σ =1.9.
3)采用LSSVM加积分器s-1来构造BIM的LSSVM逆,并将LSSVM逆置于BIM之前,LSSVM逆与BIM构成伪线性系统,其等效成4个解耦的积分型线性子系统,分别为2个位置二阶积分型伪线性子系统、1个速度一阶积分型和1个磁链一阶积分型伪线性子系统,其结构如图2所示.
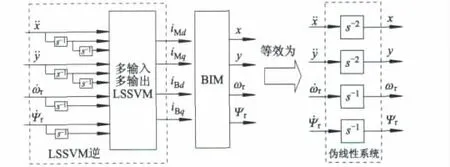
图2 BIM的伪线性系统
4)针对线性化解耦得到的4个积分子系统,采用PID调节器设计方法分别设计2个位置控制器、1个速度控制器和1个磁链控制器,并由此构成线性闭环控制器;最后将线性闭环控制器和LSSVM逆一起构成LSSVM逆控制器来实现BIM径向悬浮力、转速和磁链的独立控制,从而实现BIM转子稳定悬浮运行.图3是BIM的LSSVM逆解耦控制结构框图.
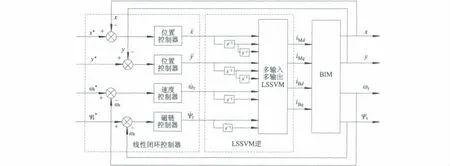
图3 BIM的LSSVM逆解耦控制结构框图
4 仿真与分析
以试验样机为对象,样机参数如下:转矩绕组、悬浮绕组极对数分别为2和1,转子质量为2.85 kg,转动惯量为0.007 69 kg·m2,转子电阻为11.48Ω,转子时间常数为1.46×10-2s,转子电感为0.167 78 H,定转子互感为0.158 56 H,2套绕组互感系数为78.2 H·m-1.
在仿真试验研究中,为了验证文中所提BIM的LSSVM逆解耦控制策略的有效性,对比研究了逆系统方法解耦控制.图4和图5分别为采用逆系统方法和LSSVM逆方法的解耦控制结果图.
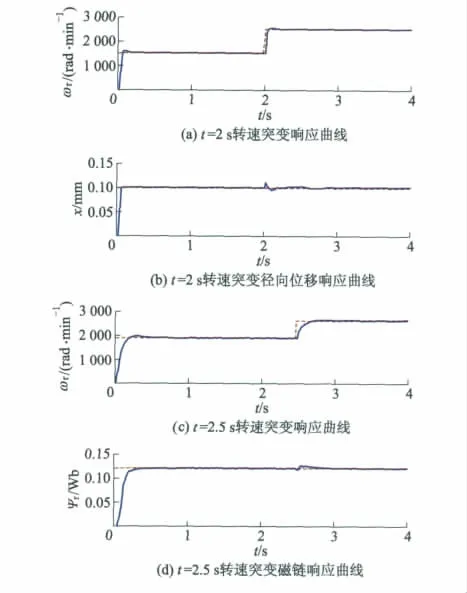
图4 逆系统解耦控制结果
图4a,4b为采用逆系统方法时转速与x方向径向位移之间的解耦结果图,在t=2 s时,转速由1 500 rad·min-1突变到 2 500 rad·min-1,此时x方向径向位移产生了明显抖动;图4c,4d为采用逆系统方法时转速与磁链之间的解耦结果图,在t=2.5 s时,转速由2 000 rad·min-1突变到2 500 rad·min-1,此时转速的突变对磁链产生了明显的影响.由图4可知,逆系统方法并未实现BIM径向位移、转速与磁链之间的动态解耦.
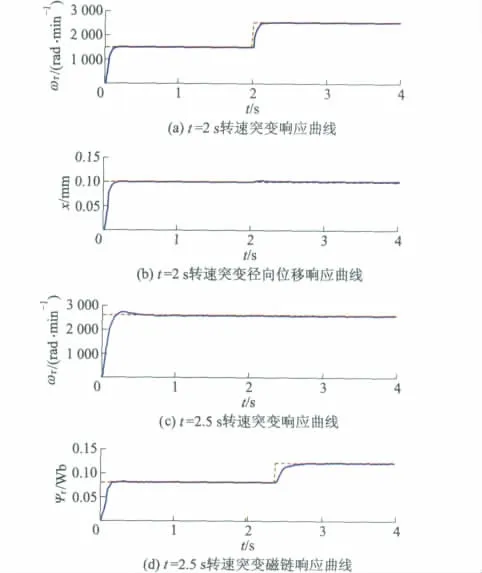
图5 LSSVM解耦控制结果
图5a,5b为采用LSSVM逆方法时转速与x方向径向位移之间的解耦结果图,在t=2 s时,转速由1 500 rad·min-1突变到 2 500 rad·min-1,此时转速的突变并未对x方向径向位移产生影响;图5c,5d为采用LSSVM逆方法时转速与磁链之间的解耦结果图,在t=2.5 s时,磁链由0.75 Wb突变到0.95 Wb,此时磁链的突变未对转速产生影响.由图5可知,LSSVM逆方法实现了BIM径向位移、转速与磁链之间的动态解耦,而且采用LSSVM逆方法比采用逆系统方法系统的稳定性能更加优良.
5 结论
文中针对BIM这一非线性、强耦合的多输入输出系统,提出了一种基于LSSVM逆的动态解耦控制策略,得到以下结论:
1)BIM是一个4输入4输出的6阶非线性、强耦合复杂系统,而且BIM系统是可逆的.
2)LSSVM逆方法结合了LSSVM的非线性回归能力与逆系统方法线性化解耦的优点,可以在不依赖BIM精确数学模型的前提下,通过对样本的非线性回归,得到BIM系统理想的逆模型.
3)LSSVM逆解耦控制方法,可以将BIM系统解耦为伪线性系统,并且通过设计伪线性系统的闭环控制器,使BIM系统获得优良的动、静态特性,真正实现径向位移、转速与磁链之间的非线性动态解耦.
References)
[1] 朱熀秋,王成波,张伟霞.基于电感矩阵的无轴承电机径向悬浮力模型[J].江苏大学学报:自然科学版,2009,30(1):53-57.Zhu Huangqiu,Wang Chengbo,Zhang Weixia.Mathematic model of radial suspension force for bearingless motors based on inductance matrixes[J].Journal of Jiangsu University:Natural Science Edition,2009,30(1):53-57.(in Chinese)
[2] Hiromi T,Katou T,Chiba A,et al.A novel magnetic suspension-force compensation in bearingless induction motor drive with squirrel-cage rotor[J].IEEE Transactions on Industry Applications,2007,43(1):66-76.
[3] Schoeb R,Bichsel J.Vector control of the bearingless motor[C]∥Proceedings of the fourth International Symposium on Magnetic Bearings.Zürich:[s.n.],1994:327-332.
[4] 朱熀秋,沈玉祥,张腾超,等.无轴承异步电机数学模型与解耦控制[J].电机与控制学报,2007,11(4):321-325.Zhu Huangqiu,Shen Yuxiang,Zhang Tengchao,et al.Mathematics model and decoupling control for self-bearing induction motors[J].Electric Machines and Control,2007,11(4):321-325.(in Chinese)
[5] Dong Lei,Liu Xianxing,Sun Yuxin.Decoupling control of the bearingless induction motor based on differential geometry variable-structure method[C]∥Proceedings of the26th Chinese Control Conference.Piscata way:IEEE Computer Society,2007:17-21.
[6] Zhu Huangqiu,Zhou Yang,Li Tianbo,et a1.Decoupling control of 5 degrees of freedom bearingless induction motors using α-th order inverse system method[J].Acta Automatica Sinica,2007,33(3):273-278.
[7] 孙晓东,朱熀秋.基于神经网络逆系统理论无轴承异步电动机解耦控制[J].电工技术学报,2010,25(1):43-49.Sun Xiaodong,Zhu Huangqiu.Decoupling control of bearingless induction motors based on neural network inverse system method[J].Transactions of China Electrotechnical Society,2010,25(1):43-49.(in Chinese)
[8] Vapnik V N.An overview of statistical learning theory[J].IEEE Transactions on Neural Net wroks,1999,10(5):988-999.
[9] 程启明,杜许峰,郭瑞青.基于最小二乘支持向量机的多变量逆系统控制方法及应用[J].中国电机工程学报,2008,28(35):96-101.Cheng Qiming,Du Xufeng,Guo Ruiqing.Decoupling compound control method based on least squares support vector machines multivariable inverse system and its application[J].Proceedings of the CSEE,2008,28(35):96-101.(in Chinese)
[10] 朱熀秋,成秋良.基于磁链等效虚拟绕组电流分析方法的无轴承电机径向悬浮力控制[J].科学通报,2009,54(2):262-268.Zhu Huangqiu,Cheng Qiuliang.bearingless motor's radial suspension force control based on flux equivalent with virtual winding current analysis method[J].Chinese Science Bulletin,2009,54(2):262-268.(in Chinese)
