汽车ABS与AFS集成控制算法
2013-10-09丁能根何勇灵
冯 冲,丁能根,何勇灵
(北京航空航天大学交通科学与工程学院,北京100191)
汽车在对开路面紧急制动时,为了兼顾制动距离和制动过程的方向稳定性,很多ABS产品都采用修正的独立控制.但是修正的独立控制是对独立控制和低选控制的折中,不能从本质上改善ABS的性能.可以通过主动转向和ABS集成控制来充分发挥ABS的性能.主动转向在转向轮上作用一附加转角,从而产生期望的横摆力矩来抵消制动横摆力矩(即车辆两侧制动力不等引起的横摆力矩).主动转向的应用使各车轮都产生最大的制动力成为可能,因此可以缩短制动距离.
目前,国内外对制动和主动转向的集成控制开展了大量研究.N.Ando等[1]将主动转向和制动/驱动的集成控制应用到轮毂电动机驱动的电动汽车上.基于最小二乘法,对车轮的转角、制动力和驱动力进行分配,使电动汽车跟随期望的横摆角速度.S.D.Cairano等[2]将主动前轮转向和差分制动应用在驾驶员辅助转向系统中,用来提高车辆的转向稳定性.这些研究的主要目的是提高车辆正常行驶工况的操纵稳定性,没有涉及到紧急制动工况.
Chen Deling等[3-4]针对制动工况下 ABS和AFS的集成控制进行了研究,主要在制动过程中通过主动转向和差分制动提高车辆制动过程的稳定性和制动效能.其中,Yan Shirong等[4]还将直接横摆力矩控制应用到了集成控制中.Zhou Shuwen等[5]对对开路面制动工况下ABS和AFS的集成控制进行了研究.通过AFS产生一个横摆力矩,以防止车辆偏离行驶路线,并与没有AFS的控制系统进行了仿真对比.C.Ahn等[6]通过估计4个车轮的制动压力计算出横摆力矩干扰,并以此对前轮主动转向进行控制,该控制算法在维持了车辆横摆稳定性的同时缩短了制动距离.以上研究仅涉及直线制动工况,未涉及对开路面的弯道制动等更复杂工况,也未考虑驾驶员转向输入或修正对控制算法的影响.笔者主要研究对开路面ABS和AFS的集成控制算法,以期在维持制动方向稳定性的同时缩短制动距离、减轻驾驶员转向操作负担.对控制算法的仿真评价采用包含驾驶员模型的闭环模型.ABS采用逻辑门限值控制算法,AFS采用横摆力矩补偿前馈和滑模反馈控制相结合的复合控制算法.作为下层控制器的ABS和AFS,二者通过上层控制算法协同工作.
1 集成控制算法
1.1 ABS控制算法
在集成控制系统中,ABS子系统采用逻辑门限值控制算法,以车轮的角加速度为主要门限、滑移率为辅助门限.为了维持对开路面紧急制动时的转向操纵能力,常规ABS中对后轴采用独立控制、前轴采用修正的独立控制,以兼顾制动距离和转向操纵2方面的要求[7].文中的集成控制算法中,在AFS纠偏能力范围内,ABS尽可能地采用4轮独立控制以充分利用路面附着力.因此直线制动时,ABS采用独立控制;在转弯制动工况,若AFS提供的横摆力矩不能完全抵消制动横摆力矩,则仍采用修正的独立控制以避免车辆失稳.但是集成控制算法中采用的是“弱修正”,以获得比ABS单独控制时高的制动强度.所谓“弱修正”是指对ABS独立控制的修正程度小于常规的“修正独立控制”.因此采用“弱修正”的制动强度介于“修正独立控制”和独立控制之间.
1.2 AFS控制算法
AFS采用横摆力矩补偿前馈控制和滑模反馈控制相结合的复合控制算法.AFS控制器的控制算法如图1所示,δf为驾驶员输入的前轮转角;δc1和δc2分别为前馈控制器和滑模控制器输出的附加转角;δ为总的前轮转角,它等于δf+δc2+δc1;ω为车辆横摆角速度,pfl,pfr,prl和 prr为 4 个制动轮缸的制动压力.

图1 AFS控制算法结构框图
1.2.1 AFS横摆力矩补偿前馈控制算法
车辆制动过程中,4个车轮产生的制动力矩为

式中:Cpf和Cpr分别为前轮和后轮的制动效能因数.
车辆模型俯视图如图2所示,忽略车轮惯性力矩,地面对车轮的纵向力为


图2 车辆模型的俯视图
在对开路面制动时,左、右车轮的制动力不等将使车辆跑偏.AFS前馈控制的目标就是在前轮产生一个附加转角δc1,其方向和大小应使得前轮附加侧向力绕车辆质心的力矩与制动横摆力矩平衡.
4个车轮受到的侧向力分别为

式中:kr为轮胎纵向力对侧向力的影响因数,kr的取值范围为0 <kr<1;kμl和 kμr为路面附着系数对左、右两侧轮胎侧向力的影响因数,计算时kμl和kμr在数值上等于附着系数;k1和k2分别为前、后轮胎的侧偏刚度;αf和αr分别为前、后轮胎的侧偏角.
达到平衡时各力对质心的转矩和为0,故

式中:tw为车辆的轮距;a和b分别为车辆质心到车辆前轴和后轴的水平距离.
δc1采用小角度假设,上式变为

车辆期望运动为中性转向运动,即前、后轮胎的侧偏角相等.当AFS前馈控制器的控制量正好补偿了前、后轮胎侧偏角的偏差时车辆为中性转向,即

在δf不太大的情况下,期望的侧向加速度为,则

因δc1采用小角度假设,上式简化为

将式(6),(8)联立,计算得到
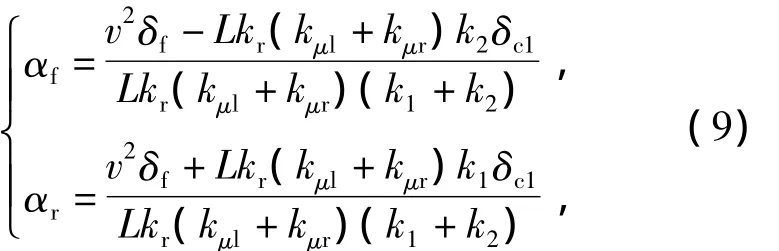

式中;L为车辆的轴距,L=a+b.
1.2.2 AFS滑模反馈控制算法
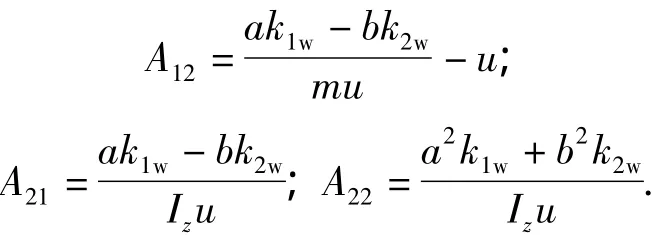
AFS滑模反馈控制算法是建立在二自由度车辆模型的基础上的,对该模型进行整理并加入干扰量可得
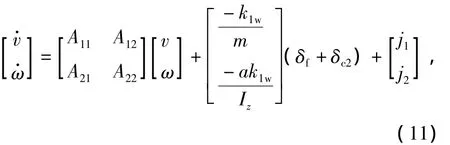
式中:m为车辆的质量;Iz为车辆绕z轴的转动惯量;v为车辆的侧向速度;ω为车辆的横摆角速度;j1和j2为干扰量;k1w和k2w分别为前、后轴的侧偏刚度,k1w=2k1,k2w=2k2;为车辆的纵向速度;
文中AFS滑模控制器的控制目标是实现中性转向,故车辆的稳定性因数K=m( a-b)=0,其L2k2dk1d中:k1d和k2d分别为前、后轴的期望侧偏刚度.因此ak1d=bk2d,若取 k1d=k1w,则 k2d=ak1w/b.分别用 vd和ωd表示期望的侧向速度和期望的横摆角速度,则参考模型为

其中:
在对开路面的制动过程中,基于车辆的操纵稳定性,希望车辆的横摆角速度跟随期望横摆角速度,因此取滑动面为
并令
其中:

根据以上2式可得

因此系统是渐进稳定的,又由于

且忽略干扰量后,展开式(11)得到第2个方程
将式(14)代入式(13)中可得反馈控制律:

1.3 ABS和AFS集成控制算法
底盘集成控制系统通常采取2种结构:一种是集中控制;另一种是协调控制[8].文中采用协调控制结构,其控制策略如表1所示.
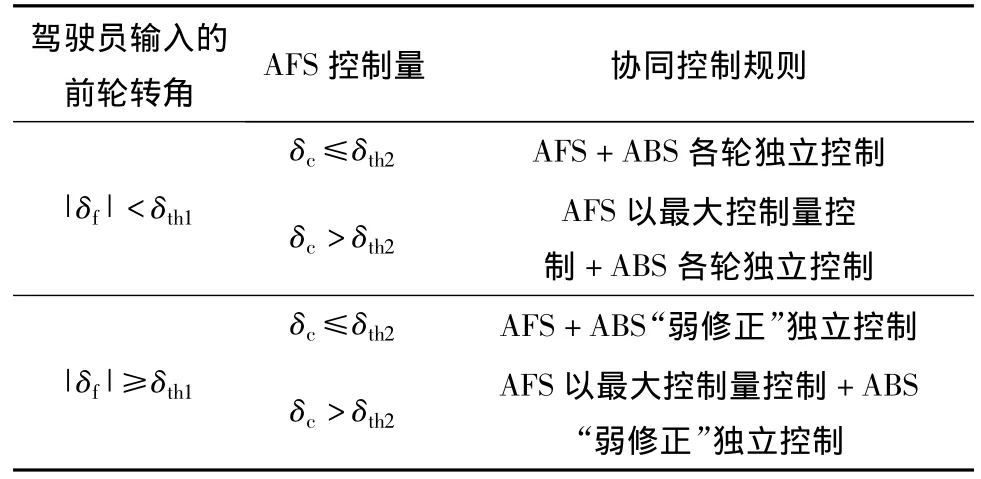
表1 ABS和AFS协调控制策略
在表1中,δc为AFS控制器的输出的前轮转角,δth1为ABS控制方式的判断标准值,δth2为AFS控制器输出的前轮转角控制量的门限值.
2 仿真验证
仿真过程采用1个8自由度非线性车辆模型[9],8个自由度分别为车辆的纵向、侧向、横摆、侧倾运动以及4个车轮的转动,轮胎模型采用“Magic Formula”轮胎模型.驾驶员模型采用基于单点预瞄驾驶员模型[10],并考虑制动和转向的综合驾驶员模型,如图3所示.

图3 驾驶员模型示意图
驾驶员的预瞄距离定义为

在期望路径已知的情况下,根据几何关系,预瞄点的误差Δ可以表示为车辆质心坐标(x0,y0)、车辆偏转角ψ0和预瞄距离ds的函数.

则驾驶员输入的前轮转角为

在Matlab/Simulink环境下对对开路面工况进行仿真.采用2种控制方法进行控制效果的对比:方法1为ABS修正的独立控制;方法2为ABS和AFS集成控制.
2.1 直线制动工况的仿真
仿真过程用到的基本参数:初始速度 u0=60 km·h-1;制动开始时刻 tb=0.5 s;驾驶员预瞄时间Tp=0.8 s.
图4为在对开路面的直线制动工况的仿真结果.车辆左、右侧的路面附着系数分别为0.2和0.8.
从图4的行驶轨迹可以看出,采用方法1时车辆偏离期望轨迹比较大,最大偏离量约为0.7 m;方法2偏离期望轨迹相对较小,最大偏离量约为0.4m.由于方法2采用了AFS调节,使得行驶轨迹与方法1偏向了不同的方向.
图4b为2种方法的横摆角速度比较,采用方法1在制动过程中,车辆有较大的横摆角速度,而方法2的横摆角速度相对较小.由图4a,d,e可以看出,方法1的制动距离超过了65 m,制动时间为6.7 s,而方法2的制动距离小于40 m,制动时间为3.7 s.方法2的制动距离和制动时间都比方法1要小.图4d中方法1的ABS采用的是修正的独立控制,右侧车轮的滑移率很小,路面的附着力没有得到充分的利用.图4e中方法2的ABS采用的是独立控制,右侧车轮也有比较大的滑移率,充分利用了高附着系数路面的附着力.
由图4c可以看出,方法2的驾驶员输入的前轮转角比方法1要略微大一些,说明采用方法2驾驶员容易疲劳.但由于仿真工况为紧急制动工况,在大幅度缩短制动距离的情况下而略微增加了驾驶员的负担还是可以接受的.
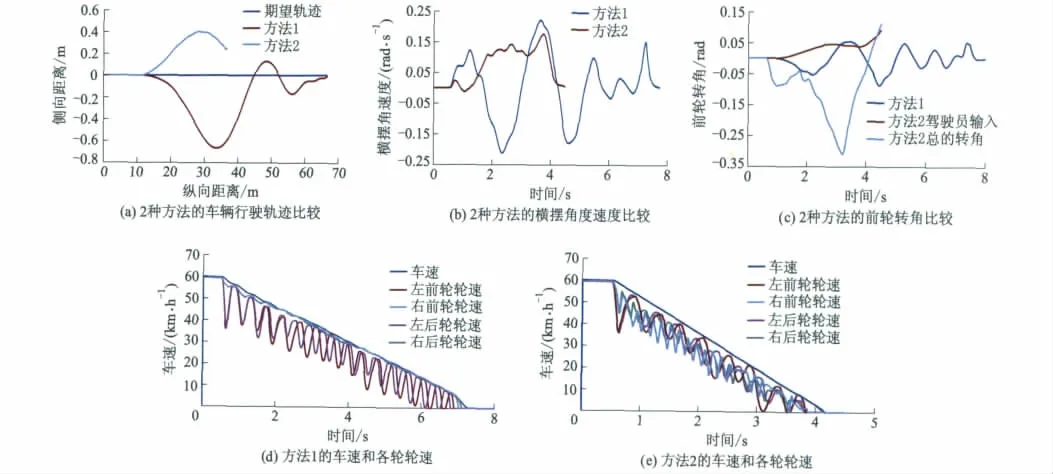
图4 直线制动工况仿真结果
2.2 定圆弯道制动工况的仿真
2.2.1 弯道内侧为低附着路面的仿真
弯道内侧为低附着路面的路径如图5所示.仿真过程用到的基本参数:u0=70 km·h-1;tb=2.5 s;路径的半径Rd=50m;Tp=0.8 s.图6为在内侧为低附着的定圆弯道制动工况的仿真结果.车辆左侧路面的附着系数为0.2,右侧路面附着系数为0.8.
由图6a可以看出,方法1的轨迹与期望轨迹的偏离值基本维持在一个比较大的定值;方法2的轨迹开始与期望轨迹的偏离也比较大,之后逐渐向期望轨迹靠拢,最后基本与期望轨迹重合.

图5 定圆弯道制动工况的路径

图6 弯道内侧为低附着的弯道制动工况仿真结果
方法1驾驶员输入的前轮转角比方法2大,期望的横摆角速度也相对比较大,但方法1的实际横摆角速度与期望横摆角速度偏差很大.可见,方法1的驾驶员的驾驶负担相对比较大,而且车辆有失稳的趋势.
为了保证车辆的操纵稳定性,在转弯的工况下,ABS和AFS集成控制中ABS采用的是“弱修正”的独立控制.原因是在转弯工况下车辆失稳的可能性更大,一旦AFS提供的横摆力矩无法抵消制动横摆力矩,车辆仍然可能失稳.但是方法2中的ABS的制动强度要比方法1大:方法1的制动时间超过了6.0 s,而方法2则小于5.5 s.可见,方法2的制动距离和制动时间都比方法1要小.
2.2.2 弯道内侧为高附着路面的仿真
在内侧附着系数为高附着的定圆弯道制动工况,以初速度为70 km·h-1紧急制动,无论是方法1还是方法2,车辆均失稳.经过多次仿真试验得出结论,在方法1的控制下,保证车辆不失稳的最高车速大约为40 km·h-1;在方法2的控制下,保证车辆不失稳的最高车速大约为50 km·h-1.
图7为在内侧附着系数为高附着的定圆弯道行驶工况下紧急制动过程的仿真结果.
图7 弯道内侧为高附着的弯道制动工况仿真结果
由于2种方法保证车辆不失稳的最高车速不同,所以2种方法所采用的参数也不同.方法1采用的主要参数:u0=40 km·h-1;tb=4.5 s;Rd=50 m;Tp=0.8 s.方法2与方法1中不同的参数:u0=50 km·h-1;tb=3.5 s.
由图7可以看出,虽然方法2的初速度要高于方法1的初速度,但是方法2的路径跟随能力要优于方法1,而且方法2的横摆角速度也小于方法1的横摆角速度.驾驶员的驾驶负担方法2也要优于方法1.由此可以看出,ABS和AFS集成控制能够提高车辆的路径跟随能力和制动过程的方向稳定性.
3 结论
在对开路面上紧急制动,ABS和AFS集成控制能够缩短制动距离;ABS和AFS集成控制能够提高制动过程的路径跟随能力;ABS和AFS集成控制能够提高制动过程的方向稳定性.
References)
[1] Ando N,Fujimoto H.Yaw-rate control for electric vehicle with active front/rear steering and driving/braking force distribution of rear wheels[C]∥The11th IEEE International Workshop on Advanced Motion Control.Piscataway,USA:IEEE,2010:726-731.
[2] Cairano SD,Tseng H E.Driver-assist steering by active front steering and differential braking:design,implementation and experimental evaluation of a switched model predictive control approach[C]∥49th IEEE Con-ference on Decision and Control.Piscataway,USA:IEEE,2010:2886-2891.
[3] Chen Deling,Chen Li,Yin Chengliang,et al.Active front steering during braking process[J].Chinese Journal of Mechanical Engineering,2008,21(4):64-70.
[4] Yan Shirong,Lin Zhiwei.Study on a new safety control method for a vehicle[C]∥Proceedings of the IEEE International Conference on Automation and Logistics.Piscataway,USA:IEEE,2009:592-595.
[5] Zhou Shuwen,Zhang Siqi.Study on stability control during split-mu ABS braking[C]∥Control and Decision Conference.Piscataway,USA:IEEE,2011:1235-1239.
[6] Ahn C,Kim B,Lee M.Modeling and control of an antilock brake and steering system for cooperative control on split-mu surfaces[J].International Journal of Automotive Technology,2012,13(4):571-581.
[7] 程 军.汽车防抱死制动系统的理论与实践[M].北京:北京理工大学出版社,1999.
[8] 董 宁.轻型汽车防抱死制动与主动前轮转向集成控制研究[D].长春:吉林大学汽车工程学院,2008.
[9] Tamaddoni SH,Taheri S.A new control algorithm for vehicle stability control[C]∥Proceedings of the10th International Conference on Advanced Vehicle and Tire Technologies.USA:ASME,2008:773-779.
[10] Ding Nenggen,Taheri S.An adaptive integrated algorithm for active front steering and direct yaw moment control based on direct Lyapunov method[J].Vehicle System Dynamics,2010,48(10):1193-1213.
