基于机器视觉的电容器铝壳端面缺陷检测
2013-09-29陈向伟
陈向伟 肖 冰 高 强
(东北电力大学机械学院,吉林吉林 132012)
机器视觉是研究用计算机来模拟生物视觉的科学技术,机器视觉系统的首要目标是用图像创建或恢复现实世界模型,然后认识现实世界。近年来机器视觉检测以其高效、智能、非接触等特点,逐渐代替了人工检测,在工业上得到了广泛的应用。
电容器作为需求量很大的产品,其外表面质量直接影响了它的质量和寿命。其生产过程由于限于人力限制不能对其外壳进行逐个质量检测。本文以电解电容器铝壳的生产为例,引入机器视觉对其进行端面缺陷检测,用以提高生产效率,降低劳动强度,保证产品的质量[1]。
1 待测零件特征
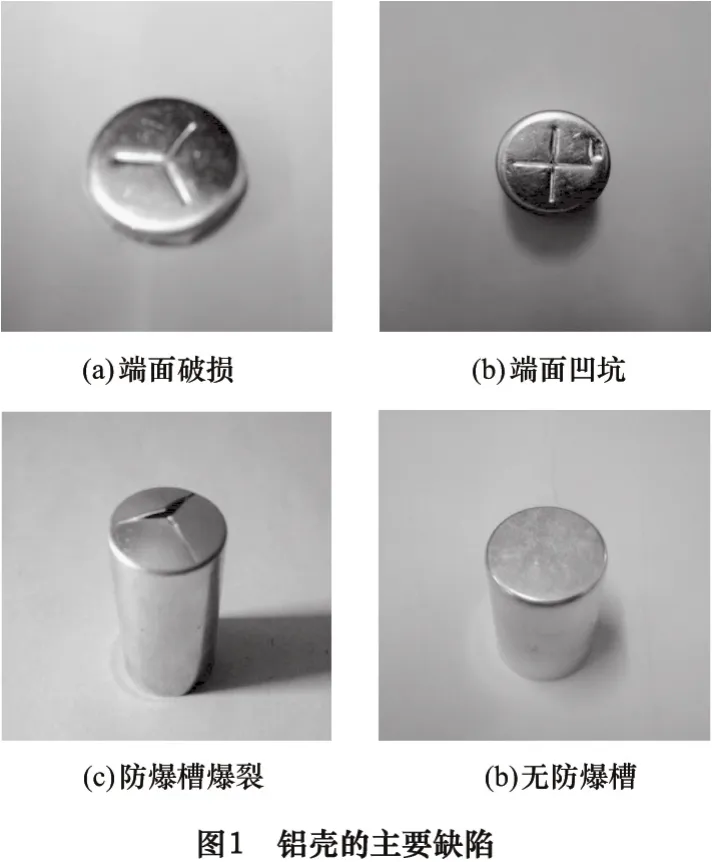
电容器铝壳的生产一般在冲压机床上进行,其形状以圆柱形居多,端面有防爆槽,其目的是防止电容器由于品质不良或其他原因瞬间爆炸之前,内部积蓄的能量能够从防爆槽处得到压力释放。由于生产工艺不足或者其他因素,端面会产生一些缺陷,如端面破损、有凹坑,防爆槽爆裂,无防爆槽等,如图1所示。
另外由于冲床上的检测条件很苛刻:(1)油污严重,产品表面不干净;(2)振动;(3)空间狭小;(4)机台数量众多。因此要求测量系统的单台成本投入要小,速度要快。作者根据实际情况,设计出一套检测方案,采用分布式多点模式,以满足检测要求。
2 测量原理以及系统结构
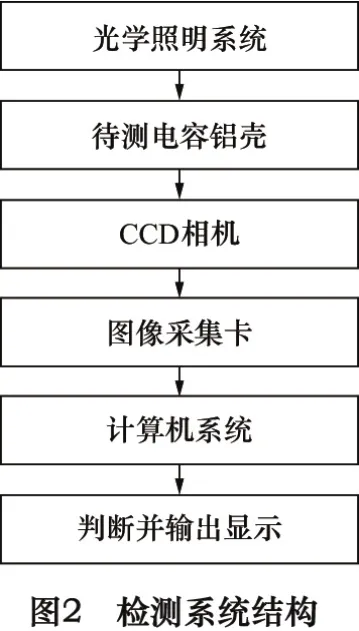
测量系统由光学照明系统、CCD摄像机、图像采集系统、计算机及相应的软件组成,具体结构如图2所示。工作原理为:在合理的照明系统中,CCD相机捕捉电容铝壳的端面信息,经透镜系统聚焦后成像于CCD面阵上。CCD将图像信号变为电荷信号,通过图像采集卡存入计算机内存,然后由软件对所采集到的图像进行分析处理,并判断是否合格,若不合格,则由剔除机构剔除。
由于铝壳的端面相对光亮,反射较强。系统将多台CCD相机并联,利用暗箱隔绝外部光,使用同轴LED光源[2]进行照射,以突显铝壳表面的瑕疵。采集到的图像信号将传送到计算机系统进行图像预处理、二值化、边缘检测、位置以及角度校正、轮廓提取、差影等一系列运算。
3 图像处理
图像处理部分主要在计算机上完成,通过Visual C++平台编程,对图像进行预处理,二值化,边缘检测,位置和角度校正以及差影运算。
3.1 图像预处理
图像预处理是在保证算法稳定性前提下实现特征定位分析,消除对特征提取敏感的噪声数据,取出冗杂信息,为后续的精密处理做好准备。为了得到清晰的图像边缘,同时不会模糊图像中的显著点,本系统采用边缘保持滤波器[3]进行滤波。算法如下:
对灰度图像的每一个象素点[i,j]取适当大小的一个邻域(如3×3邻域),分别计算[i,j]的左上角邻域、左下角邻域、右上角邻域和右下角邻域的灰度分布均匀度V,然后取最小均匀对应区域的均值作为该象素点的新的灰度值。
计算灰度均匀度的公式为:

实验证明,边缘保持滤波器可以很好地抑制图像的噪声,达到降噪效果。
3.2 图像二值化
二值化是简单的分割处理,很多物体和图像区域表征为不变的反射率或其表面光的吸收率,可以确定一个亮度常量为阈值来分割物体和背景。阈值化是输入图像f到输出图像g的如下变换:

其中T是阈值,是根据图像的灰度直方图选取的。对于图像中仅包含背景和目标物,且都具有较均匀的灰度分布的图像来说,则直方图的形状呈现双峰特性。图3为一个标准铝壳零件的灰度直方图。这时,阈值取双峰之间的最小值。
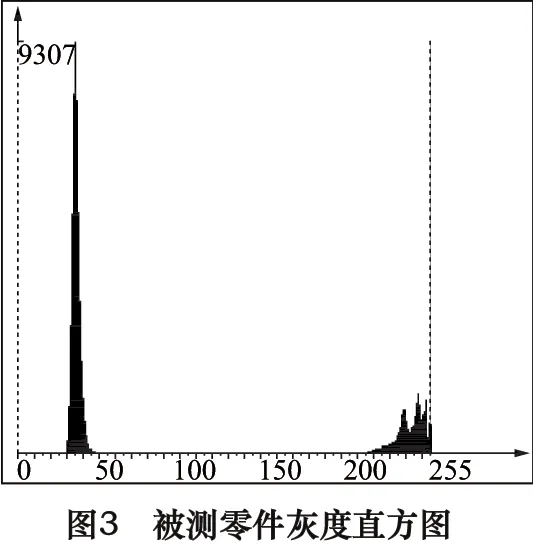
图3可直观地看到直方图有明显的双峰,通常情况将选择两峰之间的谷点作为门限值(俗称峰谷法),但由于峰值相差较大,有宽且平的谷底,故峰谷法不适用。系统使用迭代式阈值选择算法,步骤如下:
(1)求出图像中最小和最大灰度值Zmax和Zmin,令阈值初值
(2)根据阈值Tk将图像分割为目标和背景两个部分,求出两部分的平均灰度值Z0和ZB:
式中:Z(i,j)是图像上点(i,j)上的灰度值,N(i,j)是点(i,j)上的权重系数,一般N(i,j)=1.0。
(3)求出新的阈值:
(4)如果Tk=Tk+1,则结束,否则k+1→k。
3.3 边缘检测
物体的边缘是图像的基本特征。所谓边缘是指图像中灰度有阶跃或尖顶状变化的那些像素的集合。边缘广泛存在于物体与物体、物体与背景之间,是图像分割、纹理特征提取和形状特征提取等图像分析所依赖的重要基础[4-6]。
边缘检测有很多算法,如:梯度算子、Roberts算子、Sobel算子、Prewitt算子、Canny算子、Kirsch算子、Laplacian算子,以及LoG边缘检测算子等。
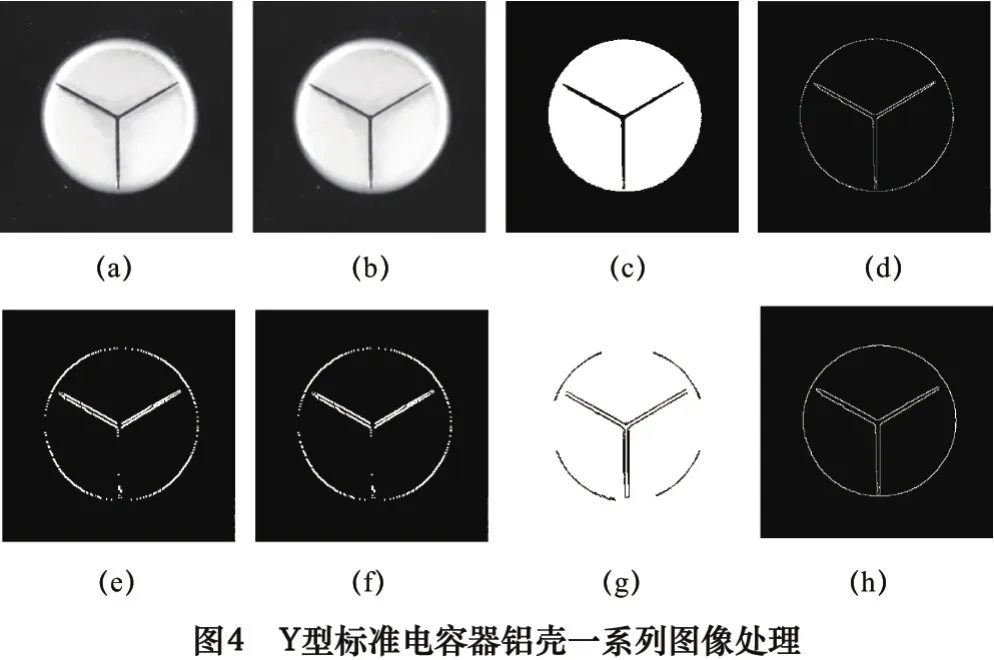
图4为Y型标准电容器铝壳源图像(a)经过边缘保持器滤波(b)、二值化(c),以及分别使用Roberts算子(d)、Sobel算子(e)、Prewitt算子(f)、Canny算子(g)、Kirsch算子(h)进行边缘检测后的图像对比。图中可以直观看到,Kirsch算子处理后的图像连续性较好,线条细且均匀,适用于本检测系统。
3.4 位置及角度校正
受现场工况的限制,每次到达被检工位的铝壳零件位置会在一定范围内有所变动,因此每次检测前必须确定图像中铝壳的准确位置。考虑到端面的特点,在此首先采用多边界点的最小二乘拟合圆对铝壳进行位置校正。
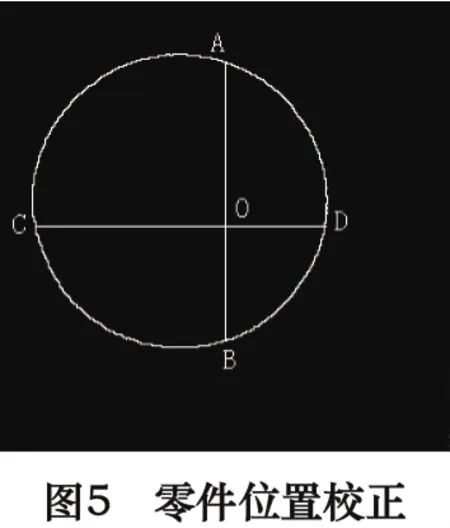
如图5所示,尽管每次检测时铝壳的位置有所不同,但是整幅图像的中心均位于铝壳圆形内。过滤掉除圆形外所有线条后,从图像中心O出发,分别向上、下、左、右寻找得到铝壳端面图像上的4个边界点A、B、C和D,并记录下这4 个点的坐标值(xA,yA),(xB,yB),(xC,yC),(xD,yD)。
圆的方程:

式中:(x0,y0)为图像的圆心;r为图像的半径。
将4个边界点A、B、C和D的坐标值代入上式,得到方程组:
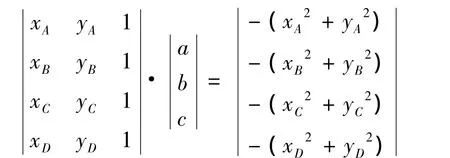
由上式可计算出图像中的圆心(xD,yD)和半径r,从而实现铝壳的位置校正。
接下来进行图像的角度校正,以“十”型铝壳零件为例,具体过程如下:
(1)过滤掉除防爆槽之外所有线条。
(2)应用 Hough[7-9]变换拟合直线,检测第一象限直线,并计算其方程,直线公式为:
则其直线与水平线夹角α:
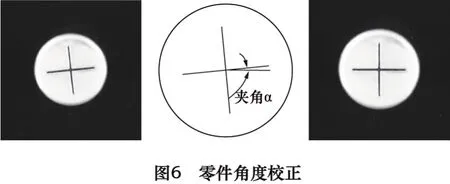
(3)在Visual C++中对零件图像进行顺时针旋转∂角度操作,将得到图像进行保存。
(4)由于同一型号的零件其半径完全相同,检测系统所使用的固定支架和固定焦距保证了采集图像的大小一致,因此将待测图像圆心与标准图像圆心对准,整幅图像的位置对齐工作就自动完成(如图6所示)。
3.5 图像的差影与图像判断
差影法[10-11]也叫减影技术,是对两个以上的图像进行相减运算,得到的差值图像用来辨别两个图像之间的差异。差影技术常用在动态目标检测跟踪、目标识别以及背景图像消除等方面。
设两个输入图像为A(x,y)和B(x,y),输出图像为C(x,y),其数学表达式如下:

将其校正后的零件图像与标准图像进行差影运算,实验所得图像如表1所示。
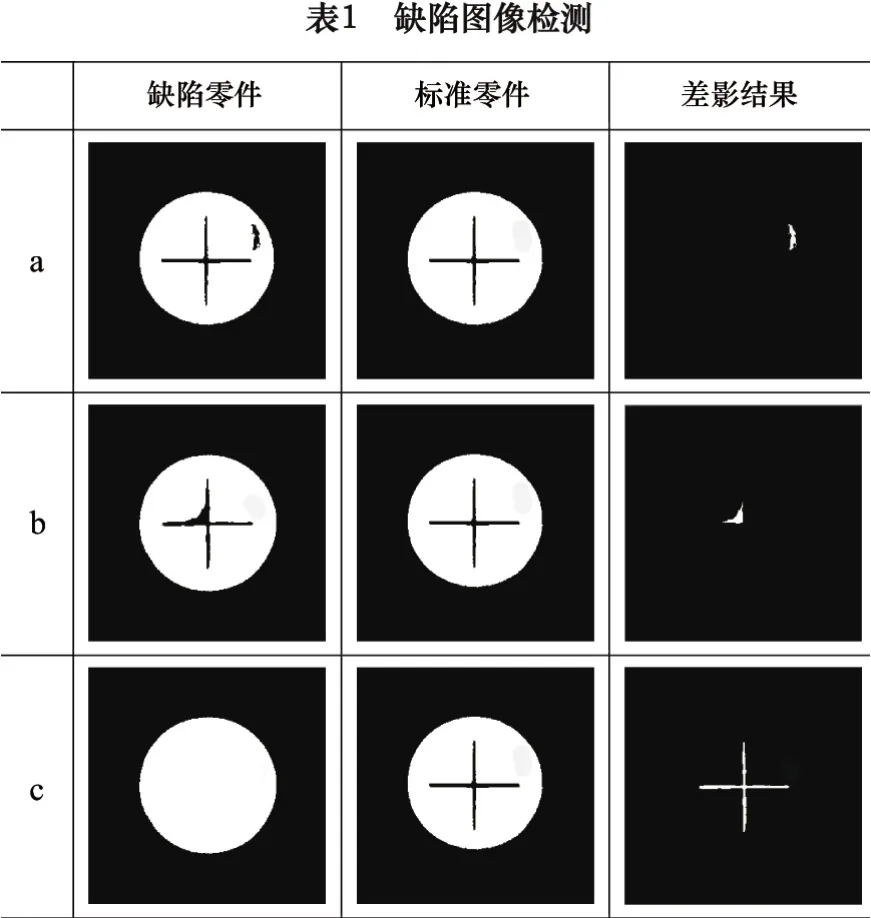
表1分别为端面凹坑零件(a)、防爆槽开裂零件(b)、无防爆槽零件(c)源图像经过校正后进行差影运算所得图像。从中可以直观的看到差影后的缺陷图像,由软件统计差影图像像素,判断图像是否为不合格零件,若是,则由剔除机构剔除。
4 结语
本文针对电容器铝壳生产时端面常出现的缺陷,根据机器视觉的特性和优势,制定了有效的缺陷检测方案。经过图像采集、二值化处理、边缘检测、位置及角度校正、差影等一系列运算,最终达到准确检测零件缺陷的目的。结合了计算机强大的计算能力,缩短了检测时间,提高了生产效率。
[1]田原嫄,潘敏凯,刘思阳.电容器铝壳表面缺陷检测的CCD图像处理[J].组合机床与自动化加工技术,2013(5):1-3.
[2]王磊,梅涛,孔令成.基于基于视觉技术的扣式电池自动检测系统设计[J].仪表技术,2011(8):5-8.
[3]贾云得.机器视觉[M].北京:科学出版社,2000.
[4]章毓晋.图像分割[M].北京:科学出版社,2001.
[5]何斌,马天与,王运坚.Visual C++数字图像处理[M].北京:人民邮电出版社,2001.
[6]韩芳芳.表面缺陷视觉在线检测关键技术研究[D].天津:天津大学,2011.
[7]李本伍,王小华,谢君廷.一种图像中检测直线的快速算法[J].杭州电子科技大学学报,2007(27):67-70.
[8]王化楠.Hough变换在视觉检测系统中的应用研究[D].大连:大连理工大学,2006.
[9]朱芳芳,顾宏斌,孙瑾.一种改进的Hough变换直线检测算法[J].计算机技术与发展,2009(19):19-21.
[10]Shih M Y,Shishido A,Khoo I C.All-optical image processing by means of a photosensitive non-linear liquid-crystal film:edge enhancement and image addition subtraction[J].Optics Letters.2001,26(15):1140-1142.
[11]陈廉清,崔治,王龙山.基于差影和模板匹配的微小轴承表面缺陷检测[J].中国机械工程,2006(17):1019 -1022.
