一种永磁同步电机初始定位的方法
2013-09-25康现伟王胜勇卢家斌王国强
康现伟,王胜勇,卢家斌,徐 晖,王国强
(中冶南方(武汉)自动化有限公司,湖北省 武汉 430205)
1 引言
随着永磁材料技术、半导体技术和控制技术的发展,永磁同步电机(PMSM)在工业控制领域逐渐取代了直流电机,取得了主导地位。永磁同步机控制重点在于电流的解偶,也就是转子位置角需要十分精确。所以在电机初始定位时对电机初始角的辨识就成了关键。
2 当前的永磁同步电机的初始定位方法及其问题
目前检测转子位置的方法有无传感器技术和传统的机械传感器控制两类。无传感器技术是近几年研究的热点,主要是利用电机绕组中相关的变量如定子电压、定子电流等,来估算转子的位置和速度,此法虽然省掉了机械传感器,但是该法存在计算量大、不能满宽范围调速、对电机的结构有要求等问题,影响了它的应用范围[1]。
带编码器的方法根据编码器类型不同又可以分为许多种。目前常用的编码器有旋转变压器和光电式增量编码器。
旋转变压器含有电机转子的位置信息,可以得知准确的位置信号,而且还可以调解出电机的速度信号。但是其解算转子位置的方法比较复杂。在实际应用中一般将其与旋变解码器配合使用,旋变解码器可以通过旋变产生的包络线信号调解出位置信息和速度信息,再通过SPI传输给控制用的CPU。实际应用中,旋变解码器都比较昂贵,而且外围电路也比较复杂,占用板子空间。如果旋变的信号不是很好,解码芯片解出的速度信号波动也会很大,严重影响控制品质。
光电式增量编码器的使用方法也有很多。可以直接用光电编码器的ABZ信号进行初始定位,具体方法是,刚上电时给电机通直流电把电机转子固定在一个固定的角度,然后以此角度为起点开始转动电机。Z信号作为校正信号,电机每旋转一周校正一次。这样做的缺点是会产生机械撞击,而且由于电机齿槽效应造成定位偏差。
还有种方法是,通过UVW信号大致估算出电机转子的位置(有30°偏差),此时可以依据这个估算角度运转电机,当电机转动遇到Z信号时即可对电机精确定位。其优点是:不会产生机械撞击,而且定位也相对准确。也可能会产生一个问题:电机运转一周才遇到Z信号,也就是说电机运转一周才可以精确定位。针对这个问题,本文进一步改进方法。电机估测完角度并开始运行后,不断的查询UVW信号,当发现UVW信号的状态发生跳变时,对电机进行精确定位。也就是把UVW信号状态跳变沿当作Z信号来使用。因为UVW信号的状态每周会跳变6次,也就是说60°会跳变一次,所以电机进行角度辨识后,最多运行1/6周就可以对电机精准定位。
3 使用普通的增量式编码器对转子初始位置精确定位
3.1 普通增量式编码器的工作原理[8]
普通的增量式编码器包括UVW三路相差120°的位置信号、AB增量信号以及Z路零脉冲信号。
霍尔元件送出的U、V、W状态信号共有六个电平状态:101、100、110、010、011、001。将电机转子位置的每360°电角度分为6个相等的区间。每个区间为60°电角度,如图1所示。A、B两路脉冲相差90°,用于判断电机转向和计算转速,Z脉冲用于基准点定位。
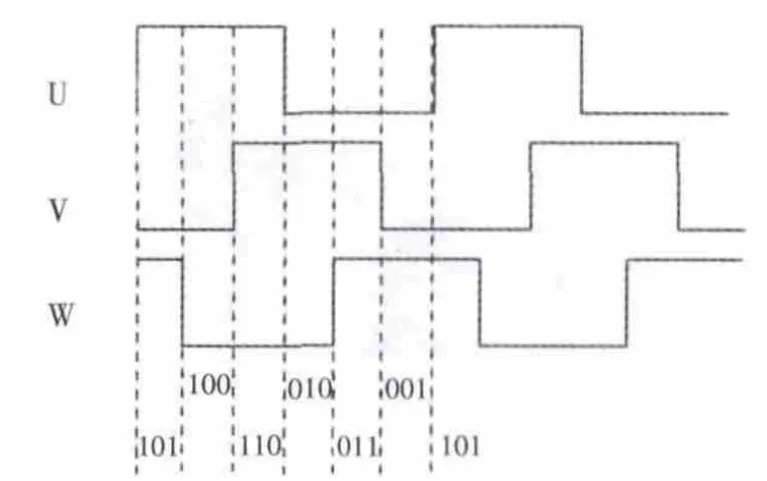
图1 UVW电平组合和区间划分
3.2 任意位置电流矢量的输出
选择两相静止定子坐标系,由永磁同步电机的数学模型可知它的定子电压方程为:
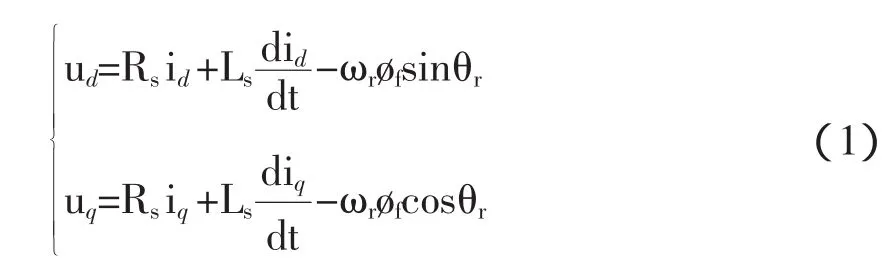
可得:
永磁同步电机在空间矢量坐标系里,同步旋转dq轴系经反PARK变换到静止的αβ轴系,再经由反CLARK变化到三相ABC轴坐标系。具体的变化方程如式(3):

由式(2)-式(3)可以获得当电机通iq=IN,id=0,θ=0的矢量电压时,三相电流状态为

图2 任意位置电流矢量控制框图
使用增量式编码器对电机进行初始定位的传统方法是,给电机通固定的直流电,使转子位置停在一个固定的角度,然后以这个角度开始旋转电机,当遇到Z信号时完成初始定位。这样可能造成电机的机械冲击;由于永磁同步电机的齿槽效应,可能造成电机直流制动时的位置不准确。
3.3 初始定位控制
针对传统方法的一些缺点,充分利用光电编码器提供的U、V、W信号,对电机的初始定位方法做了一些改进,具体方法如下。
在电机初始上电时刻,通过增量式编码器发出的U、V、W信号状态,即确定电机转子磁场矢量初始位置所处的区间,取该区间中点作为转子磁场矢量位置,控制器以此作为转子初始位置向定子三相绕组输出电流。
转子跨越不同电角度区间时,即转过一个不大于60°的电角度时,必然要越过U、V、W状态的一次变化沿。而只要转子越过了U、V、W状态的一次变化沿,U、V、W状态发生第一次变化,控制器立即动作,根据编码器送出的A、B脉冲信号进行转子准确定位。
如图3所示,系统上电时,通过读取U、V、W三个脉冲状态,可以大致估算出转子的位置。为确保初始定位时电机振动尽量小,选取每个脉冲状态的中间值作为转子的给定位置,记做β。例如UVW状态为图1中101状态时,说明电机转子位于0°~60°这个扇区内,可以给定转子位置为30°电角度,这样其与初始位置的误差控制在(-30°,30°)的范围内,然后控制电流矢量使电机运转。当U、V、W状态信号发生变化时,可以通过A、B脉冲信号记录转过的位置θ,这样得出电机初始位置角为α=60°-θ。同时把a角度设为初始位置角给定值,从而完成了转子的初始定位。

图3 初始定位原理图
上述的U、V、W信号除用于系统首次上电作为转子定位外,在系统进入精确定位并正常运行时,转子每转过60°电角度,U、V、W信号中必然有一个信号的状态会发生一次变化,根据该跳变及另两个信号的状态可对转子所处的电角度做精确定位。因此由U、V、W状态的每一次变化沿可对转子位置进行重新精确定位,系统可以对转子的位置进行校核,避免在这60°电角度的运行过程中由于编码器脉冲丢失或增加等误码情况带来的错误。保证控制器对应转子位置向三相绕组输出相应的三相电流波形。
4 永磁同步电机初始定位实验
实验以TMS320F28335的DSP控制器为核心的永磁同步电机实验平台为基础,电机的位置与速度信号检测由DSP控制器的捕获电路ECAP完成,通过CPLD对编码器的A、B脉冲信号进行处理,输出一路脉冲信号ECAD与一路方向信号DIRD给DSP。CPLD可以过滤杂波,提高了电路的可靠性。U、V、W信号通过三路IO输给DSP用于判断当前所处扇区。电机发现U、V、W状态跳变后,完成初始定位。
先做一个实验,用于判断传统的初始定位方法与目前采用的初始定位方法的优劣性。制作如图4所示工装。

图4 电机实验工装
如图4所示的电机实验工装,把带光电编码器的永磁同步电机与一个旋转变压器同轴连接,把旋转变压器接在控制板A上。通过SPI可以读出当前电机转子的绝对位置信号。电机以及它的光电编码器接到控制板B上。由控制板B控制电机初始定位以及运行,并读取电机转子的位置信号。比较电机转子处于任意位置时三者显示角度的差别,如表1所示。

表1 转子处于不同位置时的角度显示
由上表可以看出如果采用传统的直流制动再启动的方法,辨识到的转子位置角与实际的转子位置角之间会产生偏差。而文章介绍的方法则解决了这个问题。
图5所示为用示波器记录的电机完成初始定位后,电机当前角度值与a相反电动势的关系。从图中发现,电机当前角度的0°角与a相反电动势过0点重合。说明电机初始角辨识正确。

图5 电机角度与a相反电动势
5 结束语
本文提出的初始定位方法在定位过程中具有电机振动小、软件控制简单、定位精度高等优点,并且可以对光电码盘的零位进行软件调零。通过精确的初始定位不仅可以加快电机的启动速度,同时也能提高位置控制的精度。该方法可以直接应用于高性能的伺服控制系统中。
[1]Jung D H,Ha I J.An efficent method for identifying the initial position of a PMSM with an incremental encoder[J].IEEE Trans on Industrial Electronics,1998,45(4):682-685.
[2]Kim J S,Sul S K.New stand-still position detection strategy for PMSM drive without rotational transducers[A].In:Proceedings of IEEE Applied Power Electronics ConferenceEc].Bogor:1994,(1):363-369.
[3]W u R ,Slemon G R.A permanent magnet motor dri-ve without a shaft sensor[J].IEEE Trans on Industry Application,1991,27(5):1005-1011.
[4]Krishnan R,Ghosh R.Starting algorithm and perfor-mance of A PM DC brushless motor drive systemwith no position sensor[A].In:Proceedings of 20 IEEE Power Electronics Specialists Conference Ec].1989,(2):815-821.
[5]季学武,何正义,张雪峰磁旋转编码器在永磁同步电机位置测量中的应用[J].电气传动,2O08,38(2):6-8.
[6]王成元,夏加宽,杨俊友等.电机现代控制技术[M].北京:机械工业出版社,2006.
[7]王晓明,王玲.电动机的DSP控制--TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[8]黎永华,皮佑国.基于磁定位原理的永磁同步电机转子初始位置定位研究[J].电气传动,2010,(3).
