基于单控制器的轮驱电动汽车驱动装置研究
2013-09-22,,,
, ,,
(1.西安理工大学电气工程系,陕西西安 710048;2.西安交通大学电力设备电气绝缘国家重点实验室,陕西西安 710049)
1 引言
电动汽车以电机为动力源,其动力分布主要分为轴驱和轮驱两大类。轮毂电机驱动装置是电动汽车先进的驱动方式,近年来电动自行车和电动汽车的快速发展和广泛应用,更是将轮毂电机技术提升到了一个崭新的高度。
轮驱电动汽车,节省了汽车空间,减少了汽车质量,提高了传动效率[1],但必须解决的一个技术问题就是转向时2个电动轮之间协调控制,即电子差速[2]。
为了解决轮驱电动汽车2个电动轮的协调控制,采用英飞凌XE164-FM单控制器进行控制,该控制器针对无刷直流电机,具有专用的多通道霍耳模式,在控制和实现方面具有很大的优势,并能同时实现2个电机的驱动控制,消除了2个控制器之间的CAN通信问题。
2 原理与设计
2.1 轮驱电动汽车的结构和原理
轮驱电动汽车驱动装置主要由蓄电池、逆变器(含有控制器)和电动轮(驱动电机和车轮紧密集成而形成)3大部分组成,图1为装置结构示意图。
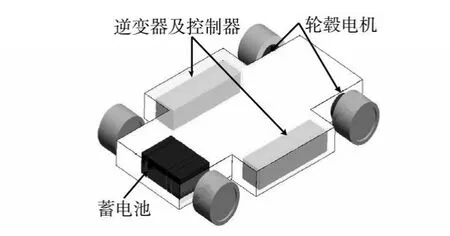
图1 轮驱电动汽车驱动装置的结构示意图Fig.1 Structure diagram of in-wheel EV drive system
电动汽车的操控方式主要有2种:一是利用“油门”来调节牵引电机的电磁转矩,电机的电磁转矩依据电动汽车实际行驶过程的阻力矩而定[3];二是利用“油门”来调节牵引电机的转速,进而改变电动汽车行驶速度。本文采用“油门”调节牵引电机电磁转矩的方式来控制牵引电机。
图2给出了总体控制框图,其工作原理为:当驾驶员通过加速踏板发出一个转矩信号时,位移传感器将其转换为电信号送给电控单元(electronic control unit,ECU),ECU根据加速踏板位移传感器信号和转角位移传感器信号,来决定2个电机的转矩分配,实时地调节电机的转矩。因此对轮毂电机在电动汽车直线行驶时同步转动和在转向行驶时差速转动的协调问题是控制的核心。

图2 轮驱电动汽车控制框图Fig.2 The block diagram of the controller
2.2 电子差速控制策略
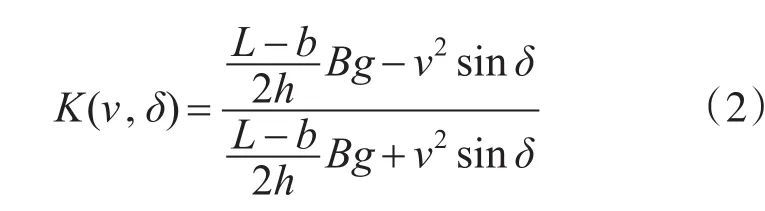
现有的电子差速控制方法主要分为2种[3]:基于转速控制与基于转矩控制的电子差速。由于转向时2个车轮的垂直载荷会发生变化,为了使两轮的附着率相等,采用了基于转矩的控制方法。汽车转向模型[4]如图3所示。文献[5]对电子差速做了大量的研究,其结论为:电动汽车转向行驶时转矩差为
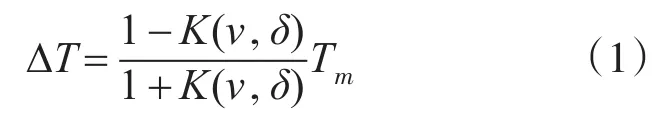
其中
式中:Tm为参考转矩。
图3 Ackerman-jeantand汽车转向模型Fig.3 The steering model of Ackerman-jeantand
由最佳转矩比电子差速控制算法分配的左后轮和右后轮的转矩为
2.3 牵引电机的控制
以无刷直流电机作为牵引电机具有效率高、功率密度大、瞬态特性好等特点,能够很好地满足电动汽车对牵引电机的基本要求[6]。驱动装置的控制器硬件功能框图如图4所示。控制器采集转向角信号、加速踏板信号、电机电流信号以及霍耳位置传感器转子位置信号,综合以上信号获取驾驶员的操作意图,实施相应的电机控制策略,实现轮驱电动汽车的前进、后退、加速以及转向行驶。
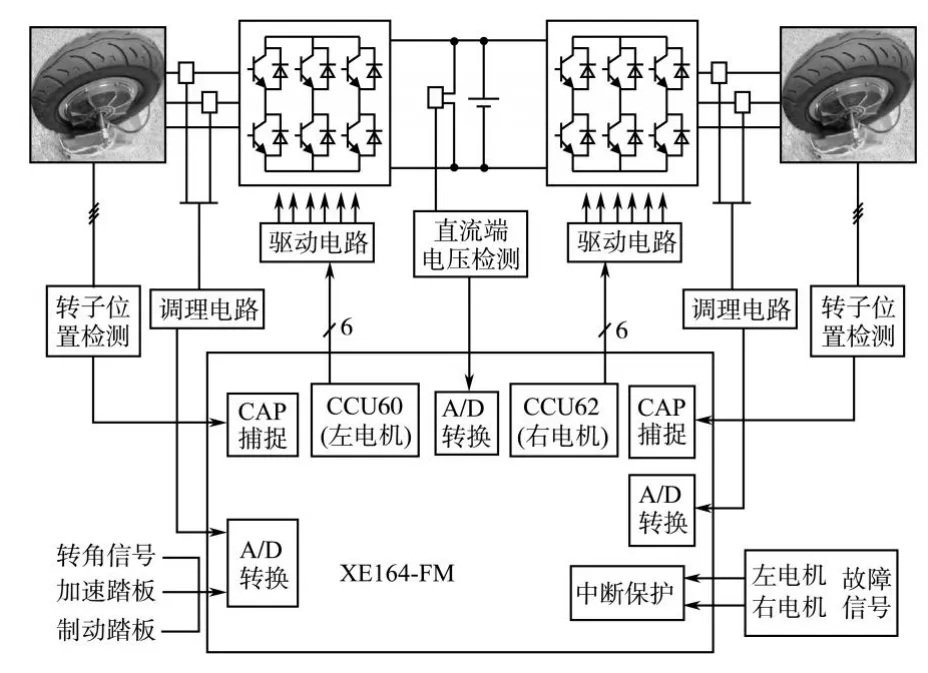
图4 EV驱动装置控制器功能框图Fig.4 Functional block of controller in EV system
无刷直流电机的控制采用三相6状态、两两导通工作模式。霍耳位置传感器实时将3路位置信号送入单片机,经过软件处理得到6路PWM控制信号。本文采用半桥调制方式,上桥臂常通或常断,下桥臂PWM斩波,电机的霍耳信号与相应的导通相的关系[7]如表1所示。
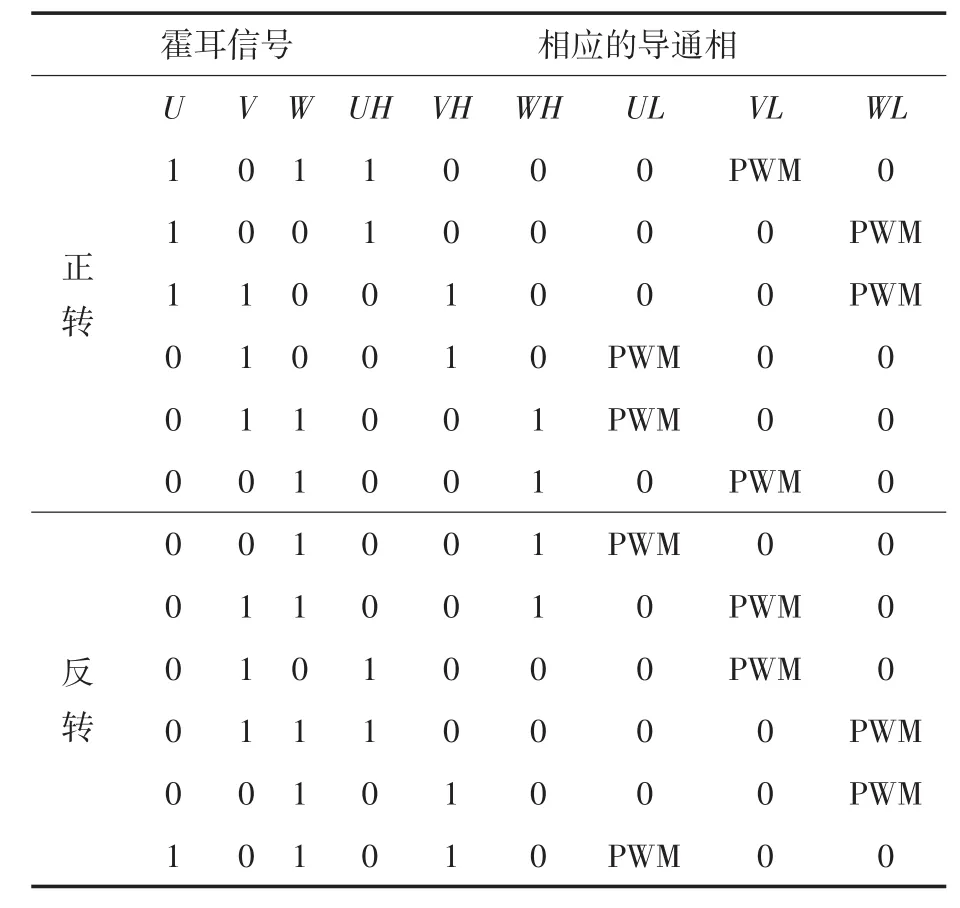
表1 无刷直流电机正/反转信号Tab.1 Clockwise/reverse signal of BLDC motor
表1中,1表示常通,0表示常断,PWM表示斩波。牵引电机的转矩控制是轮驱电动汽车驱动装置的关键,由文献[8]可知,在不考虑电枢反应的情况下,转矩闭环可以由电流闭环实现,所以采用电流闭环方式,对无刷直流电机的电磁转矩进行控制。
选用Infineon公司的16位单片机XE164-FM作为控制器的核心。其资源配置:P10.9-P10.7左电机3路霍耳位置信号;P10.0-P10.5左功率电路脉冲信号;P10.6左电机紧急制动;P1.1-P1.7(除P1.3)为右功率电路脉冲信号;P7.1为右电机紧急制动;P7.2-P7.4右电机3路霍耳位置信号;P5口作为电流、电压的采集口;P1口作为前进、后退、停止的状态检测以及继电器、驱动使能的控制端口。采用定时器中断,定时读取I/O端口的状态。
2.4 装置的硬件电路设计
硬件电路的设计主要包括:电压、电流调理电路、转向盘转角采集电路、加速踏板采集电路、电机电流采集电路、位置信号检测、驱动电路及主电路等。其中驱动电路为该装置的关键模块。
驱动电路如图5所示,选用Infineon公司6ED003L06-F驱动芯片,此驱动芯片工作电压为13~17.5 V且自身带有欠压锁定功能,典型值10.3 V。采用自举电容方式产生4路独立电源,由于此芯片为低电平有效,设计中在前级输入加入SN74HC14反相器,一方面可以增加脉冲信号的驱动能力,另一方面在软件编程时实现正逻辑。驱动电路单独调试过程中,首先调试下桥臂的驱动脉冲放大功能正常,之后再进行上桥臂测试。
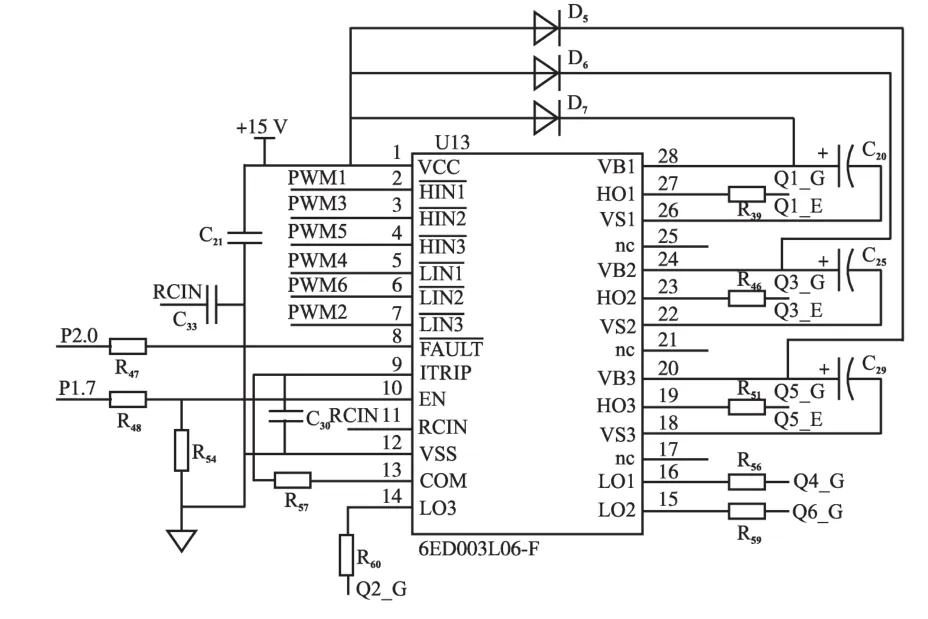
图5 开关管驱动电路Fig.5 The drive circuit of switches
2.5 装置的软件程序设计
控制器的主要任务是通过对DPR(前进、停车、后退)档杆信号、加速踏板信号以及转向角信号的采集,来实时地反映驾驶员的操作意图,对2个无刷直流电机进行转矩控制,图6为主程序流程图。

图6 主程序流程图Fig.6 Main program flow chart
XE164-FM内部有CCU60和CCU62 2个并行单元,可以同时工作在霍耳模式,这样可以极大简化代码编写工作,并且可以实时交互两电机的运行状态。采用T13定时器作为PWM波的发生中断,周期为50 μs,T12定时器定时启动A/D转换,周期为800 μs。通用定时器T2/T3,主要完成前进、后退、停止操作的状态检测,周期为1 ms。
3 实验
驱动装置的两轮毂电机参数为:额定电压UN=48 V,额定转速n=700 r/min,额定功率PN=500 W。供电电源采用铅酸蓄电池12 V60 Ah×4块。主电路的开关管选用100 V,10 A的IRFW530A,开关频率20 kHz。
图7为无刷直流电机所采用的半桥调制的驱动波形,从图7中可以看出上管常通,120°换向,下管为PWM斩波模式。

图7 半桥调制的驱动波形Fig.7 Drive waveforms of half bridge modulation
图8给出了单个电机给定电流和电机相电流的波形,当油门踏板从小到大给定时,电机带负载启动,电流刚开始突增,由于电流环限制了其启动电流。启动之后电流趋于稳定。图9为电动汽车转向行驶时,内外侧电机电流波形,为更清楚地观察差速功能,给定转向角最大。
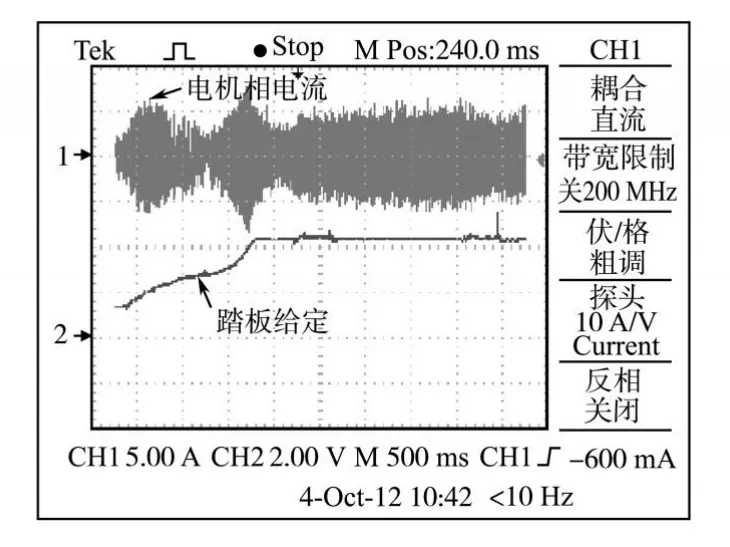
图8 给定电流和电机相电流的波形Fig.8 The given current and motor current waveforms
由图9可知,转向行驶时,外侧电机的相电流在5 A左右,内侧电机在3 A左右,说明外侧电机的输出力矩大于内侧电机,并由相电流的频率可以看出,外侧转速大于内侧转速,实现了差速功能。由于2个电机绕组电感不一致性,导致两电机相电流的波形不是很一致。
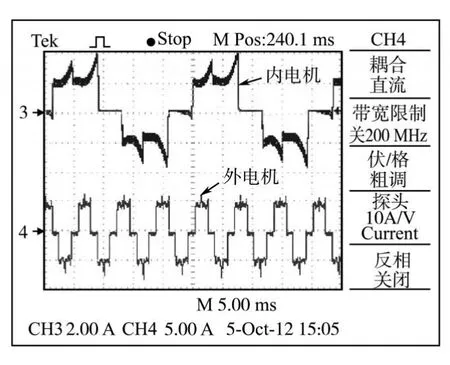
图9 转向行驶电机电流波形Fig.9 Motors current waveforms in steering running
4 结论
以英飞凌XE164-FM为核心,构建了轮驱电动汽车试验平台,采用单控制器实现两电机的同时控制,解决了两电机协调控制时的数据交互问题,消除了CAN通信环节。试验平台能够保证轮驱电动汽车双电机直线行驶时的同步转动和转向行驶时的差速转动,证明了方案的可行性和正确性。
[1]肖阳.轮式驱动电动汽车控制策略的研究[D].哈尔滨:哈尔滨工业大学,2007.
[2]王强,王耘,宋小文.基于差动驱动的电子差速控制方法研究[J].机电工程,2011,28(6):698-703.
[3]易圣.电动汽车的驱动系统测试平台设计[D].北京:北方工业大学,2009.
[4]Lee Ju-Sang,Ryoo Young-Jae,Lim Young-Cheol,et al.A Neural Network Model of Electric Differential System for Electric Vehicle[J].In Industrial Electronics Society,26th Annual Conference of the IEEE,2006,1:83-88.
[5]葛英辉.轮式驱动电动车控制系统的研究[D].杭州:浙江大学,2004.
[6]卫国爱,全书海,朱忠尼.电动汽车驱动用无刷直流电动机的控制与仿真[J].电机与控制应用,2009,36(1):16-18.
[7]张辉,李金祁,蔡聪朝,等.采用单电阻电流采样的EPS无刷直流电机的控制[J].电气传动,2011,41(7):13-16.
[8]廖凌霄.四轮独立驱动电动汽车控制策略的研究[D].武汉:武汉理工大学,2010.
