预测电流闭环控制方法的研究
2013-09-22,
,
(太原理工大学煤矿装备与安全控制山西省重点实验室,山西太原 030024)
本文采用基于空间矢量的无差拍电流控制方法。该方法要求实时、准确地预测出下一时刻的指令电流值,因此将预测电流的开环控制改进为闭环控制以提高预测的准确性。目前常见的预测方法包括线性预测[1]、抛物线预测[2]、重复预测观测器、自适应及神经元等预测方法。本文利用Matlab软件对比研究了线性预测与抛物线预测方法,从而得出抛物线预测法的预测效果更好。最后将此控制方法用于APF的实验,实验结果证明了该控制方法的可行性与有效性。
1 空间矢量无差拍控制原理
三相3线制并联有源电力滤波器的主电路如图1所示。

图1 三相3线制并联有源电力滤波器的主电路Fig.1 The main circuit of three-phase three-wire shunt APF
由基尔霍夫电压定律可得APF的数学模型为

式中:j=A,B,C;ej为电源电压;uj为以点O为参考点所得A,B,C3点的电压;icj为APF输出的补偿电流;R,L分别为主电路交流侧的等效电阻与等效电感;Udc为主电路直流侧的电容电压。
忽略等效电阻,并在k时刻对式(1)中的微分项离散化可得:

式中:T为1个周期的时间;icj(k),icj(k+1)分别为k时刻与k+1时刻的补偿电流值。
由于APF输出的补偿电流要求实时、准确地跟踪其指令电流,于是应将k+1时刻检测的谐波电流值作为指令电流代替式(2)中的,可得:

由式(3)可知,参考电压是由主电路的等效电感、电源电压以及指令电流得到。可见,SVPWM控制算法实质是通过控制输出电压而控制输出电流。由于采用DSP控制系统,使k+1时刻使用k时刻得到的指令电流值来计算参考电压,所以在k+1时刻才能得到k时刻的实际补偿电流值,故存在一拍的滞后。为了弥补滞后现象,引入无差拍控制。该控制方法的原理框图如图2所示。
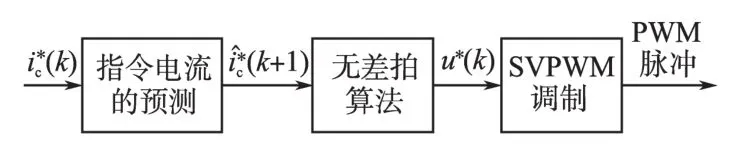
图2 基于SVPWM无差拍控制的原理框图Fig.2 Block diagram of deadbeat control base on SVPWM
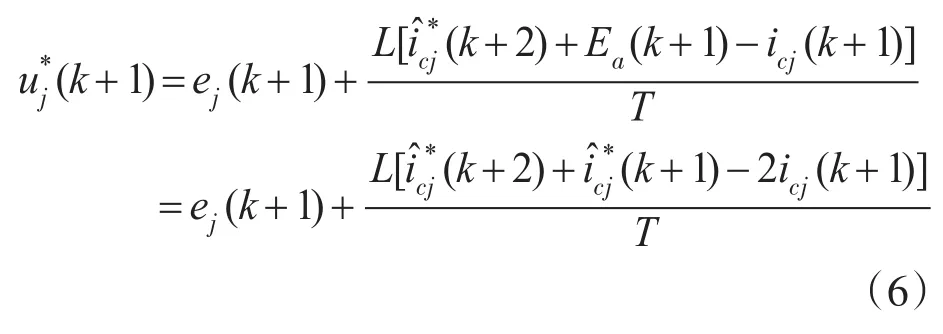
该方法的基本原理是用k时刻预测出k+1时刻的指令电流值,然后根据无差拍控制算法得出参考电压u*(k),最后由SVPWM控制方法[3]生成PWM脉冲信号。这样便能保证每一时刻输出的补偿电流等于其指令电流。参考电压u*(k)的表达式为

上述指令电流的预测属于开环预测,但实际检测出的谐波电流是时变、非线性、且易受被测系统干扰的。为了提高指令电流预测的准确性,对此预测模型进行改进,使之成为闭环预测。具体改进方法为:首先计算出k+1时刻的预测值与实际值的偏差,然后将其加到下一时刻的预测值上,表达式为

将得到的偏差加到下一时刻的预测值上可得:
2 指令电流的预测方法
实现无差拍控制效果的关键是指令电流预测的实时性和准确性。目前主要的预测方法包括自适应预测、神经元预测、重复预测观测器以及拉格朗日插值法等方法。由于自适应预测和神经元预测的实时性较差[4],重复预测观测器[5]实现较复杂,因此本文重点研究了线性预测和抛物线预测方法。
2.1 线性预测算法
已知k-1时刻、k时刻的指令电流值,采用拉格朗日线性插值公式计算k+1时刻的指令电流值

将式(7)得到的k+1时刻的指令电流预测值代入式(4)便可得出参考电压值。
2.2 抛物线插值预测算法

同理,通过式(8)得出的指令电流预测值代入式(4)便可得出参考电压值。
可见,线性预测和抛物线预测的算法简单,计算量小且实时性好。
3 Matlab仿真分析
虽然理论分析和一些实例证明抛物线插值的精度比线性插值高,但由于本系统中指令电流的表达式难以得到,所以本文利用Matlab软件对线性插值和抛物线插值这2种预测法进行仿真研究,并对上述控制方法进行仿真以验证其可行性与有效性。
3.1 仿真参数的设置
本文采用Matlab2010/Simulink软件搭建的有源滤波器仿真模型如图3所示。其中PWM脉冲生成模块的仿真模型如图4所示。仿真参数设置如下:1)电源电压为标准的正弦波,相电压有效值为220 V,频率为50 Hz;2)谐波源为带电阻负载的三相二极管整流桥,进线电感为10 mH,电阻为20 Ω;3)主电路直流侧参考电压为1 000 V,电容为3 300 μF,交流侧输出电感为10 mH;4)IGBT的开关频率为6.4 kHz;5)仿真时间为0.1 s,算法采用ode45。
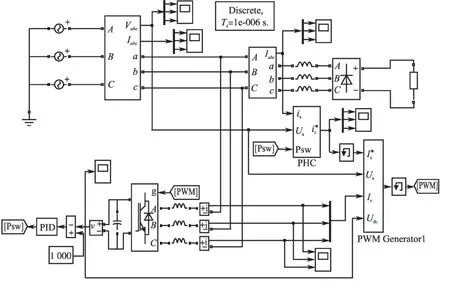
图3 并联有源电力滤波器的仿真模型Fig.3 Simulation model of shunt APF
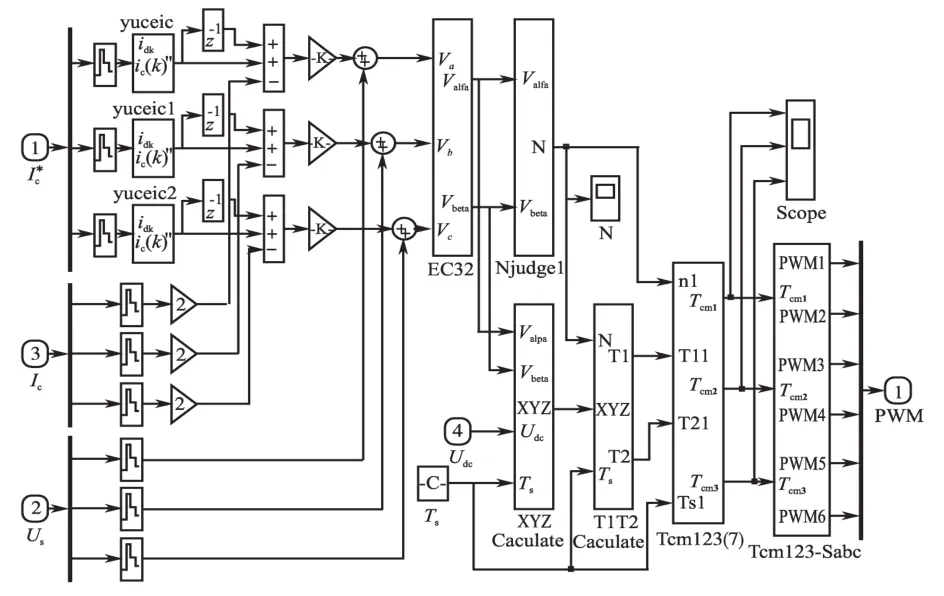
图4 PWM脉冲生成的仿真模型Fig.4 Simulation model of PWM signal generation module
3.2 仿真结果的对比分析
由于系统三相对称,以A相为例进行分析。A相负载电流波形及其频谱图如图5所示,其谐波总畸变率为19.7%。采用基于指令电流开环预测与闭环预测的空间矢量无差拍控制方法得出经有源电力滤波器补偿后电源电流的仿真结果如图6所示。

图5 A相负载电流波形及其频谱图Fig.5 The waveforms and the corresponding frequency spectrum of the A-phase load current
可见,在无差拍电流控制中采用电流闭环控制比开环控制的效果好,补偿后电源电流中谐波总畸变率由6.51%下降到2.55%。

图6 A相电源电流的波形及其频谱图Fig.6 The waveforms and the corresponding frequency spectrum of the A-phase supply current
上述仿真是采用线性预测算法进行指令电流的预测。为提高指令电流预测的准确性,本文对抛物线预测算法也进行了仿真,其结果见图7。
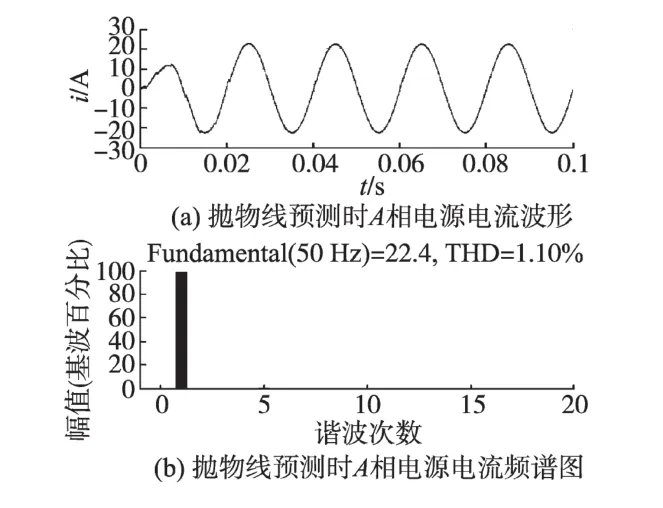
图7 抛物线预测时A相电源电流波形及其频谱图Fig.7 The waveforms and the frequency spectrum of the A-phase supply current by parabola forecast
由图7可知,采用抛物线预测法比线性预测法的预测效果更好。因此,在实验中采用抛物线预测法并进行电流闭环控制。
4 控制方法的DSP实现
本文用TMS320F2812 DSP作为APF的控制核心,在集成开发环境CCS3.3上使用C语言进行软件系统设计。APF的软件系统包括主程序和中断服务程序2部分。主程序完成系统初始化、键盘及显示功能。中断服务程序实现PWM脉冲的生成、功率驱动保护以及直流侧电压的过压与欠压保护功能。
本文采用锁相环芯片CD4046得到与A相电源电压同步的方波信号,并将其送入DSP的捕获单元3(CAP3)引脚,通过编写CAP3中断服务程序实现同步控制和电源频率的计算。又采用CD4040芯片得到频率为6.4 kHz的方波信号,该信号接到捕获单元1(CAP1)引脚,利用软件程序实现PWM脉冲的生成。
当CAP3检测到方波信号的上升沿时产生中断,若是第1次进入中断则使能CAP1中断。使能CAP1中断后便可等其触发信号的到来,以执行此中断服务程序。该中断服务程序包括A/D采样子程序、PI调节子程序、指令电流预测子程序以及SVPWM控制子程序。该程序的流程如图8所示。
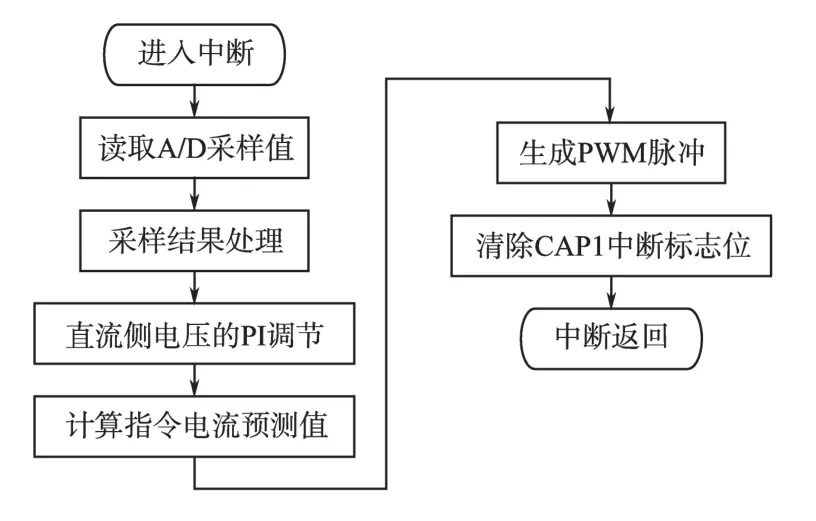
图8 CAP1中断服务程序流程图Fig.8 Flowchart of interrupt service program for capture1
指令电流预测子程序分为2部分:一是采用单位功率因数谐波检测法计算谐波电流;二是采用抛物线预测法得到指令电流的预测值。SVPWM控制子程序是先用改进的闭环电流控制计算参考电压,再采用SVPWM算法生成PWM脉冲。计算指令电流的流程图如图9所示。
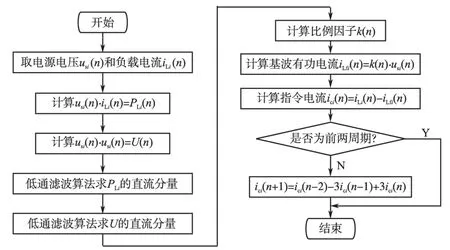
图9 指令电流子程序流程图Fig.9 Subprogram flowchart of reference current
通过运行上述程序可生成6路PWM脉冲信号,将此信号接到驱动电路进行隔离和放大,再将其接到IPM模块以控制IGBT的通断,便可产生补偿电流。以A相为例,得出的负载电流与补偿后电源电流的波形分别如图10和图11所示。
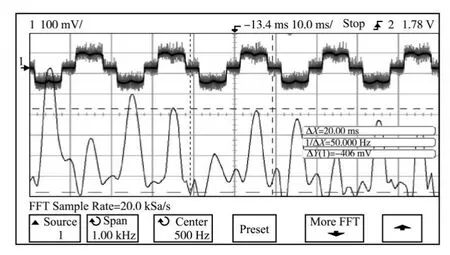
图10 负载电流的波形Fig.10 Waveforms of load current
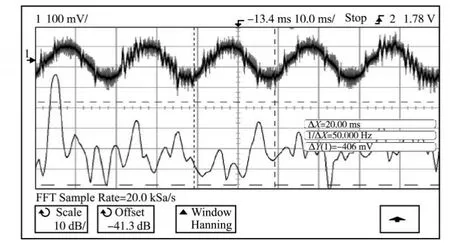
图11 电源电流的波形Fig.11 Waveforms of supply current
5 结论
本文研究了空间矢量无差拍电流控制方法在APF中的应用。在无差拍电流控制部分采用了闭环电流控制以提高指令电流预测的准确性。利用Matlab仿真软件对比研究了线性预测与抛物线预测算法的预测效果,得出抛物线预测算法的准确性更高。因此,在APF实验中使用抛物线预测算法进行指令电流的预测并对其采用闭环控制。实验结果证明了该控制方法的可行性和有效性。
[1]于晶荣,章兢.基于电压空间矢量的有源滤波器无差拍电流控制方法[J].湖南大学学报:自然科学版,2008,35(10):31-35.
[2]曾繁鹏,谭光慧,伏祥运,等.有源电力滤波器的简单无差拍控制策略[J].电气应用,2006,25(8):60-63.
[3]ZHOU Juan,WU Xiao-jie,GENG Yi-wen,et al.Simulation Research on a SVPWM Control Algorithm for a Four-leg Active Power Filter[J].Journal of China University of Mining and Technology,2007,17(4):590-594.
[4]Temurtas F,Gunturkun R,Yumusak N,et al.Harmonic Detection Using Feed Forward and Recurrent Neural Networks for Active Filters[J].Electric Power Systems Research,2004,72(1):33-40.
[5]高吉磊,黄先进,林飞.基于重复观测器的PWM整流器无差拍控制[J].电工技术学报,2010,25(6):47-54.
