基于PLC的电机同步数字控制模型研究
2013-09-22周秀君邓榆林
周秀君,邓榆林
(广东省佛山市顺德学院,广东顺德528333)
1 引言
电机的同步性能会直接影响着系统的可靠性、产品的质量和市场销售。目前,基于单片机、DSP等为控制核心的同步系统较多。实际中,PLC为各种各样的自动化控制设备提供了安全可靠和比较完善的控制应用,在自动化设备运行的PLC上增加部分硬件,推导一种新型电机算法设计的原理和公式,将电机的速度同步问题转换成位置跟踪同步问题,设计相应的流程,编写关键控制程序,提供外加同步误差补偿,实现了一种具有较高应用价值的同步控制。通过实践证明,克服了影响电机同步性能的各种因素,如各传动轴的驱动特性不匹配、同型号设备之间的误差、同一设备驱动信号的误差和负载的扰动等。另外,采用系统中本身固有PLC作为控制器可以使工业控制系统简化结构、降低成本。
2 控制方案
目前,多电机同步控制主要有等状态耦合控制和主从控制两种结构。等状态耦合控制中的各传动轴之间的速度协调关系由同步系数决定,其控制器采用同一给定速度参考指令,这种结构简单,容易实现,但随环境的变化和电机负载特性的影响,同步性能很难得到保证。现有的方案是采用主从控制结构,即将主电机的转速输出根据时间、速度和频率之间的关系进行数据转换变换成脉冲数作为从电机的脉冲数设定值,同时进行位置和速度的PID调节,从而调整从动机的输出频率,使从机的输出量能准确无误地跟踪主机的输出量变化并能复现,它们之间组成了闭环控制系统,从而保证两台电机的同步运行,多个从机之间可采用级联或并联方式。
3 数学模型的建立
模型建立力求结构简单、工作可靠、便于推广应用。主电机可采用任意电机,从电机以二相步进电动机为例,采用全脉冲数字控制,控制核心是利用控制设备运行的PLC(FX2n48MT)、光电素子(EE-SX670A型)和光电盘。光电盘用于位置检测,光电素子产生光源和吸收透过码盘后的电脉冲,分别将主从电机的负载位置转换成电脉冲信号,输入到PLC的高速输入端(X0和X1),鉴向器鉴别给定信号的旋转方向,驱动模块[1](ST-2HB04X型)放大功率驱动电机,主从电机传动链上的零件(如变速器、码盘等)参数分别完全相同,模型图如图1所示。

图1 系统模型图
首先假定X0端的计数元件为C200,反馈端X1的计数元件为C201,在T1(取样时间)时间内X0端和X1反馈端的光电盘旋转各产生一串方波脉冲,采样脉冲波形如图2所示。

图2 采样脉冲波形图
令C ′=C200-C201,则有:
C′=0,Y0端输出脉冲数为零,电机转速为零,系统处于静止状态;
C′>0,Y0端输出脉冲数,电机朝着缩小偏差的方向运动,直至给定角度和反馈角度相等,系统处于新的静止状态[2];
C′<0,系统运动方向情况相反。
再假设给定/反馈光电盘光栅格数A,变速传动比为i,步进电机驱动器设定细分值所对应的“步∕圈”数为B,则将脉冲值转换为速度如下:

将两速度值相减,速度差值:nc=nr-nf。差值信号经PID调节后,可得:

经查阅,二相步进电机的每转脉冲数=200*细分数[3],变成在时间上连续且具有一定频率的脉冲输出,其输出频率为:

该输出经驱动器驱动电机和变速机构,使执行机构获得相应的速度。这种方法也适用于其它不同的电机。
4 软件实施
为实现程序结构优化和快速跟踪同步,在满足原有控制系统功能的前提下,增加电机同步控制功能流程[4],采用位置和速度的PID调节,流程规划为数据采集取样、数据运算处理、数值调节处理和驱动输出等环节,软件程序设计流程如图3所示。

图3 软件流程图
4.1 PID调节
将计数器C200和C201中脉冲数分别存入相应地址单元中,根据上述算法进行速度位置计算(梯形图省略),将主电机/从电机光电盘的脉冲数差值以及速度差值分别存入单元D100和D200地址单元中,根据不同的电机同步系统,通过人机界面改变PID参数,调出理想的目标速度值,程序如图4所示。
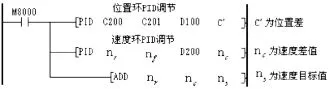
图4 PID调节程序梯形图
4.2 脉冲驱动输出
将变速传动比i、常数K200和步进驱动细分值B分别存入单元D4、D5和D6地址单元中,计算脉冲输出指令的频率和脉冲数,然后进行脉冲输出,程序如图5所示。
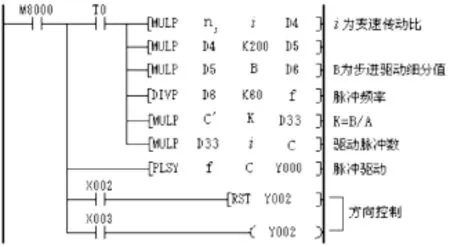
图5 脉冲输出程序梯形图
5 结束语
随着科学技术的发展,同步控制成了现代工业中最为关键的技术问题。长期以来,科技人员一直致力于同步控制系统及如何提高同步控制精度等方面的研究工作。本文基于PLC的同步数字控制技术研究,既解决了同步可靠性问题,又降低工业系统的成本,而且系统数据分析稳定运行时的精度高达±0.5%。希望在工业环境下PLC控制的工业系统中得到广泛应用,并为其他控制系统和其他电机的同步控制提供可资借鉴的技术依据。
[1] 王宗培,程树康.双极性驱动的三相反应式步进电动机[J] .微特电机,1981,(2).
[2] 卢道英.微型直流电动机转速测量的一种方法[J] .微特电机,1985,(3).
[3] 张文海.一种测试微型直流电机转速的方法[J] .无线电,1978,(3).
[4] 秦继荣.现代直流伺服控制技术及其系统设计[M] .北京:机械工业出版社,1993.
