基于RTW的直线电机伺服系统自抗扰控制研究
2013-09-20周长福,李晓婷,杨文奕等
0 引言
20世纪90年代初,国外首次提出了“直线同步电机驱动的垂直运输系统”的构想,并开始理论和试验研究,主要包括高层建筑电梯和矿井提升系统两个方面的应用[1]。我国于1995年开始此项研究,焦作工学院于1998年年底建成了PMLSM矿井提升系统试验模型[2]。
旋转电机通过转换机构将旋转运动转换为直线运动,由于存在转换装置和中间传动机构,所以存在体积大,效率低,精度差等问题。采用直线电机作为伺服系统的俯仰驱动单元,直线电机的初级和次级与被驱动平台直接安装,消除了从电机到被控对象的中间环节,是一种理想的传动方式[3]。尤其是将直线电机用于伺服平台俯仰向的驱动,与传统的“旋转电机+滚珠丝杠”或者液压油缸等传动形式相比,具有结构紧凑,传动精度高,加减速性能好,速度范围宽,没有传动误差和反向间隙等优点。同时,它具有很高的极限速度、很强的加速能力以及良好的定位精度,因此它是作为直线运动的理想的传动方式[4,5]。
典型的应用例子是美国Ingersoll铣床公司生产的高速卧式加工中心HVM800和X、Y、Z轴均采用永磁式直线伺服电机驱动[6];在直线电机高低向应用主要有,东京丰岛万世大楼的电梯是第一部由直线电机驱动的电梯,日本三井精机公司的高速工具磨床,Z轴上下移动采用的直线电机可达400次/min;俄罗斯重点研究的矿井提升系统[7]。从已知的资料看在提升系统中,日本目前的研究重点还是电机本身,俄罗斯更注重机械结构,国内将垂直使用的直线电机应用到摆动氚钛靶装置[8],焦留成对永磁同步直线电机在垂直提升系统中应用时的磁场分析、电磁参数、结构参数、模型等进行了分析[9]。
1 直线驱动伺服平台非线性特性分析
本论文研究的以直线电机作为俯仰向驱动机构的伺服试验平台实物和结构如θ,其中θ为的直线电机驱动负载平面的俯仰向运动角。从系统组成结构上来看,该伺服平台俯仰向由四部分组成:平台机械结构部分、直线电机系统、挠性速率陀螺仪系统和计算机控制系统。
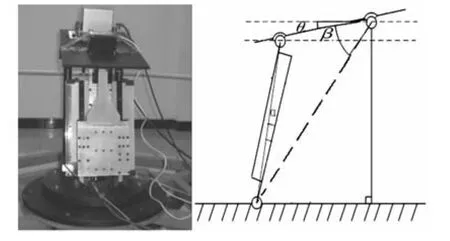
图1 直线电机控制伺服平台
但是,从另一方面考虑,直接驱动的方式也致使系统参数摄动,负载扰动等非线性因素不经过中间环节缓冲而直接作用到直线电机系统,这些非线性因素是造成系统性能下降的主要因素。在本系统中存在的非线性因素主要可以分为两类,如负载阻力扰动、摩擦扰动、推力纹波、齿槽推力、永磁体磁链谐波扰动和端部效应等;另一类是以直线电机为驱动单元时常有的非线性因素,另外一类是由于本伺服平台结构特点所特有的非线性因素。
直线电机用于伺服平台俯仰向的驱动时,其负载特性和运动特性都不是线性的变化关系。动子负载M包括直线电机动子质量及与动子相连接的机械部件的质量。当同时考虑M以及运动平面的不平衡力矩Mp时,负载平衡力Fx同运动平面转角θ间的力角特性如图2曲线所示非线性关系。
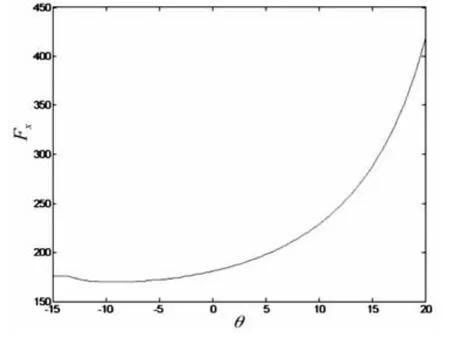
图2 Fx-θ力角特性曲线图
2 直线电机驱动伺服平台自抗扰控制器设计
以上讨论表明,由直线电机驱动的伺服试验平台,其运动轨迹呈现出非线性特性,这直接导致控制系统参数随着平台运动而在一定范围内变化,对于控制器而言,被控对象的模型在不断改变,此外由传感器引入了量测噪声等非线性因素。考虑大量的干扰、非线性特性和建模的困难性,本文利用自抗扰控制器不需要知道被控对象的内部机理和外扰规律的特点,将未建模动态和未知外扰都归结为对象的未知扰动,用输入输出数据估计并给予补偿,分别设计适用于本系统的自抗扰控制器的跟踪微分器(TD)、扩张状态观测器(ESO)和PD控制器。
假设模型参数变化和量测噪声等为干扰因素,通过辨识可得图1所示平台的系统位置环开环标称模型为:

则微分形式为:

根据控制对象阶次应该设计四阶的ESO,但是这样会给参数调整带来麻烦,为了降低参数调整的难度,利用扩张状态观测器实现降阶来设计自抗扰控制器。利用扩张状态观测器来实现降阶具体思路是:利用扩张状态观测器估计未知模型和外扰的能力,来估计出系统的高阶部分,然后再进行补偿,补偿以后的系统就近似成一个简单的低阶的积分串联结构。
2.1 跟踪微分器的设计
二阶跟踪微分器(TD)的离散化公式为:

其中h是采样步长,fhan为如下非线性函数:

这里TD的输入v为给定的指令角度值。两个可调参数中,r为“速度因子”,决定了跟踪速度;h0为“滤波因子”,起对噪声的滤波作用。
2.2 扩张状态观测器的设计
将式(2)改写成:

将输出的三次微分也当做干扰进行估计和补偿,设计如下扩张状态观测器:
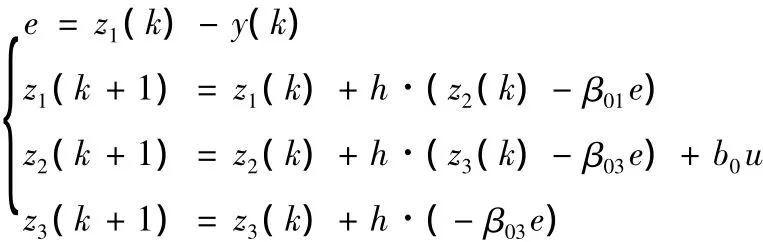
2.3 控制器算法设计
由抗扰控制器结构可知,算法首先用ESO中扩张状态补偿得到一个新的对象,然后给这个新的对象设计PD控制器,即取TD和ESO相应输出之差的线性组合作为新被控对象的控制量,控制算法结构框图如图3所示,算法整体公式如图4所示。

图3 控制器算法框图

图4 控制器算法公式


这里未能确定的参数是β1和β2,它们是PD控制器的两个参数,仿真和试验中需要调节。
3 基于RTW和xPCI的实验系统设计和结果分析
3.1 实验系统设计
鉴于基于RTW和xPC Target半实物仿真具有良好的实时性、快速性及控制设计的直观性,构建基于 RTW和xPC Target双向转台半实物仿真实验系统,如图5仿真计算机由基于xPC Target双机结构,即宿主机-目标机组成,采用TCP/IP通信协议。接口设备采用研华PCI-1716数据采集卡。控制对象为双向转台,具有高低向和水平向两个自由度。传感器采用陀螺仪对平台的速度信号进行测量。本论文的实验研究内容为该系统俯仰向控制系统。建立半实物仿真模型如图6。
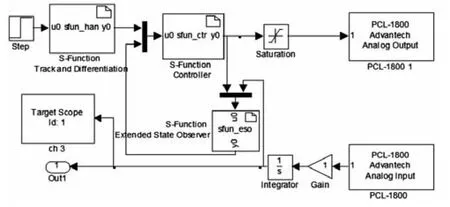
图6 基于RTW和xPCI的俯仰向实验系统
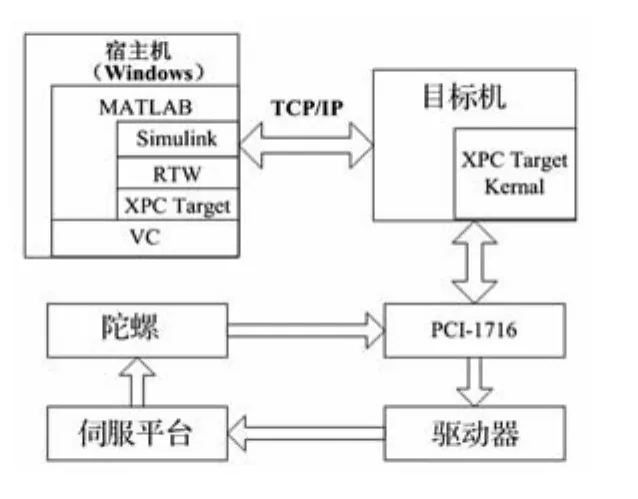
图5 基于RTW和xPC Target双向转台半实物仿真实验系统结构
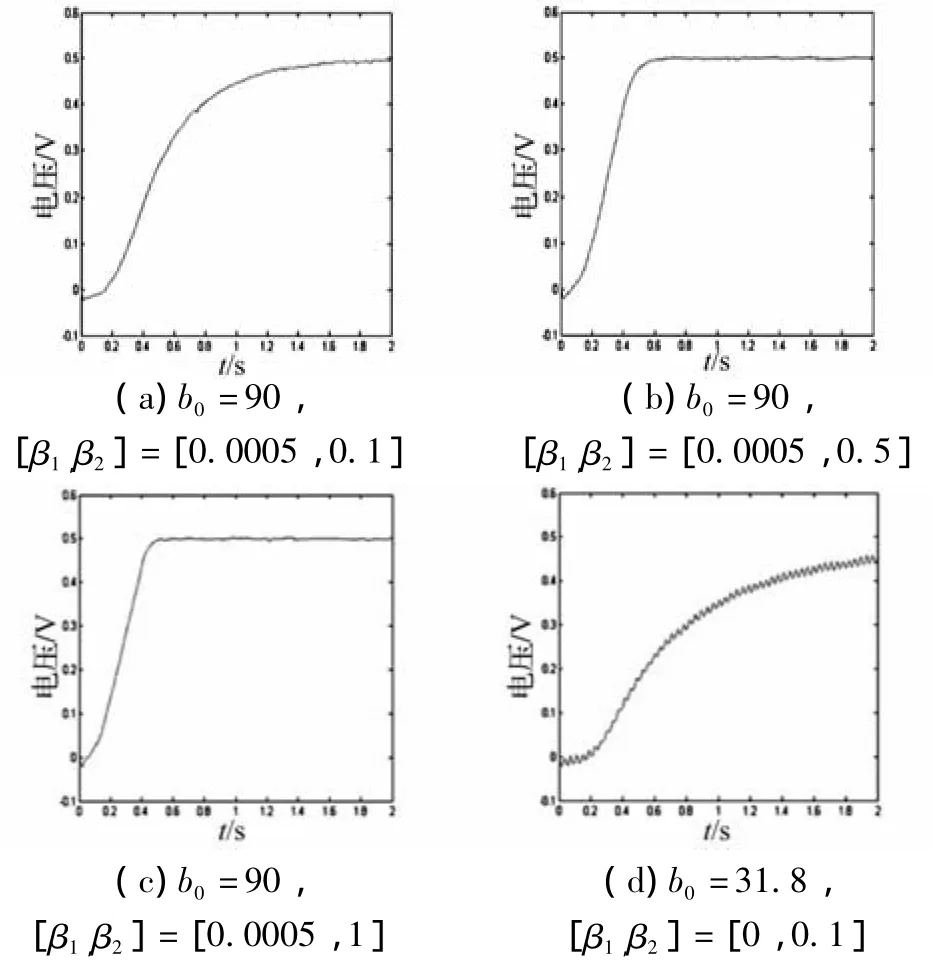
图7 b0=90 时,[β1,β2]取值不同,阶跃响应输出
3.2 实验结果及分析
向系统输入幅值为0.5的阶跃信号,b0=90,如图7(a)、(b)和(c)所示。
图7(d)为b0=31.8时,验证其参数取值对系统性能影响的系统响应。
以上实验结果表明,适当增大β2参数,系统响应变快。实际上,由于 Kp= β1,KD= β2,但当参数 β2[β1,β2]的取值为[0.000 5,0.1]、[0.000 5,0.5]和[0.000 5,1]时系统响应分别过大时,系统会出现抖动,甚至不稳定情况。参数b0在一定范围内可调节。参数过小时,系统出现振荡,如图7(d)。调节b0参数在一定范围内变化,系统未出现振荡,参数较大时控制效果好于参数较小时。
4 结束语
本文分析了直线电机作为二轴转台俯仰向驱动器的伺服平台的有点,以及由于自身结构特点和传感器噪声所带来的非线性因素。进而通过辨识的系统标称模型设计了自抗扰控制器的跟踪微分器、扩张状态观测器和控制率。通过构建基于RTW和xPC Target的半实物仿真系统,分别对b0、β1和β2不同取值时进行了对比实验分析。实验结果表明自抗扰控制器将系统存在的非线性因素作为扰动考虑,起到了很好的控制效果,同时,xPC Target作为一种快速原型设计的方法,便捷、高效,大大缩短了控制器设计和开发的过程。
[1]叶云岳.直线电机原理与应用[M].北京:机械工业出版社.2000.
[2]汪旭东,袁世鹰,焦留成.永磁直线同步电动机垂直运输系统的研究现状[J].微机电,2000.33(5):35-38.
[3] Li,W.C.,Z.Y.Dong,Z.Liang.Design of Vertical Transportation System Driven by Permanent Magnet Linear Synchronous Motor Signal Acquisition[C]//2012 International Conference on Industrial Control and Electronics Engineering(ICICEE).2012:2033-5.
[4]刘晓俏,基于RTW和xPC Target半实物仿真试验技术研究[D],北京:北京理工大学,2007.
[5]刘扬,直线电机高低向伺服系统分析与设计[D].北京:北京理工大学,2009.
[6]吴晓霞,王淑红,垂直运动的永磁直线同步电动机的应用研究[J].电力学报,2007.22(1):20-23.
[7]黄彬彬,张杰,垂直运动永磁直线同步电动机技术综述[C]//全国直线电机、现代驱动及系统学术年会论文集.2008.
[8]陈红涛,赵芳,江历阳,摆动氚钛靶装置[D],北京:中国原子能科学研究院.2010.
[9]焦留成,垂直运动永磁直线电动机电磁参数及特性研究[D].北京:中国矿业大学,1998.