驾驶员模型参数对横航向PIO的影响研究
2013-09-13谭晓军王新民姚从潮
谭晓军,王新民,姚从潮
(西北工业大学自动化学院,陕西 西安,710129)
0 引言
对于驾驶员诱发振荡(PIO)的定义,航空界有着很多说法,MIL-STD-1797A规范中定义 PIO为:“由驾驶员致力操纵飞机而引起持久的或不可操纵的振荡。”它是人—机系统的稳定性问题,是指驾驶员在进行正常操纵时与飞机的多个独立变量之间的不良的,非故意的和非典型的人—机闭环耦合振荡现象。
上世纪40年代之前,低速飞机的飞行包线和过载包线都很有限,几乎不会出现操纵系统模态和机体模态的动态耦合,PIO问题不突出。随着科技的进步,飞机性能不断提高,在不同高度、速度和过载的情况下,要使驾驶员操纵杆力梯度保持在一个合适的范围内变得越来越困难,PIO的出现严重地影响飞机的飞行品质,甚至危及飞行安全。PIO现象的严重性越来越突出。由于PIO现象是人和飞机两个飞行安全因素同时影响的产物,自从动力飞机发明以后,不良的飞机振荡就一直存在,特别是在飞机结构越来越复杂的今天,对 PIO的研究已经成为飞行器设计、测试和操作的一个重要议题。
驾驶员诱发振荡包括纵向和横航向两个方面。由于纵向方面发生的概率较大,危险性也较大,对此国内外做了很多的研究,但是对横航向驾驶员诱发振荡的研究较少。然而近年来逐渐对横航向驾驶员诱发振荡开始重视起来,本文则是针对横航向 PIO问题进行研究,分析驾驶员模型中诱发横航向 PIO的关键参数,并通过构建闭环仿真系统进行分析,对驾驶员模型中参数设计有一定指导意义。
1 横航向驾驶员诱发振荡结构图
驾驶员诱发振荡是驾驶员、操纵系统、飞机本体组合系统的闭环不稳定现象。它的出现将严重地影响飞机的飞行品质,甚至危及飞行安全。
以偏航角的指令为例,它与纵向人—机系统方块图的最大区别在于由单环控制回路变成重环控制回路。即在偏航角的控制回路内部增加了一个滚转角的内环控制回路。其原因是:对于常规布局的飞机,驾驶员通常通过产生滚转角(压杆、蹬舵)来改变飞机的偏航角。
1.1 闭环仿真系统模型
PIO是驾驶员操纵引起的持久的或不可操纵的大幅度震荡现象,其实主要是人-机系统闭环不稳定问题。对于人—机系统横航向特性的研究,不同于纵向特性。这主要是由于它必须同时考虑横向和航向的相互影响以及舵面的输入由一个变为两个的情况。人—机闭环仿真系统横航向模型如图1所示。
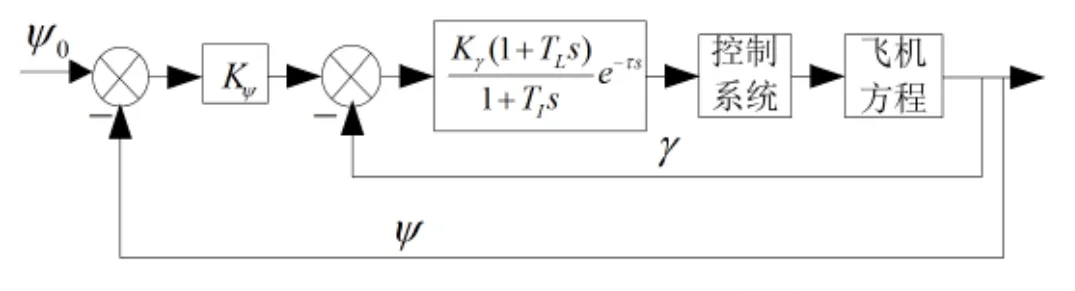
图1 人-机系统横航向方框图
1.2 驾驶员模型
驾驶员的行为模型是非线性的,还可以是离散的,但当研究具有稳定性的操纵对象时,可以用近似的线性模型。它是一种等效模型,即不论其中是否有非线性成分,人们仍认为它是线性特性。驾驶员数学模型包括放大、超前、惯性、延迟、随机和自适应等特性,但是在大多数情况下,可以重点考虑其中一个或者几个特性。本文采用的驾驶员模型为:
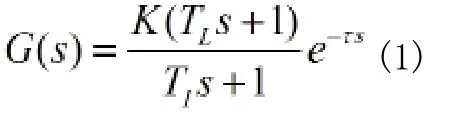
包括:放大、超前、惯性、延迟四个特性。
1.3 控制器模型
在图1所示的人-机系统横航向方框图中,控制系统为常规的比例积分(PI)控制器。通过PI控制器,把驾驶员的输出信号转化为舵面信号,输入到飞机模型。
1.4 飞机模型
本文采用的飞机模型为空客A300的横航向运动方程,数据来源为文献[10]。飞机方程如下:

2 仿真分析
2.1 外环放大系数的影响
从仿真结果可以看出,在一定范围内,当外环环放大系数增大时,对响应会有一定程度的影响,但响应曲线没有出现的震荡。因此,当外环放大系数增大,对影响横航向 PIO的产生不明显。
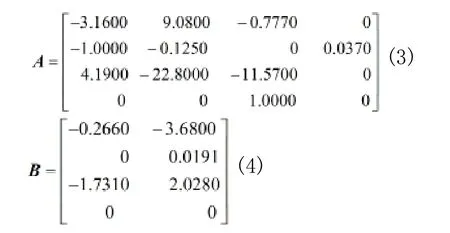
2.2 内环放大系数的影响
内环放大系数 的大小表示驾驶员操纵的程度,该参数由小变大,表示驾驶员操纵动作由柔和到快速,再到粗猛。在根据图1中建立的Simulink仿真模型,使内环放大系数由小变大,对比其相应结果,如图3所示。
从仿真结果可以看出,在一定范围内,当内环放大系数增大时,响应会出现震荡的情况,当继续增大,响应还会发散。因此,当内环放大系数增大,即驾驶员操纵变得快速或者粗猛时,容易产生横航向 PIO。
图2 外环放大系数对横航向PIO的影响
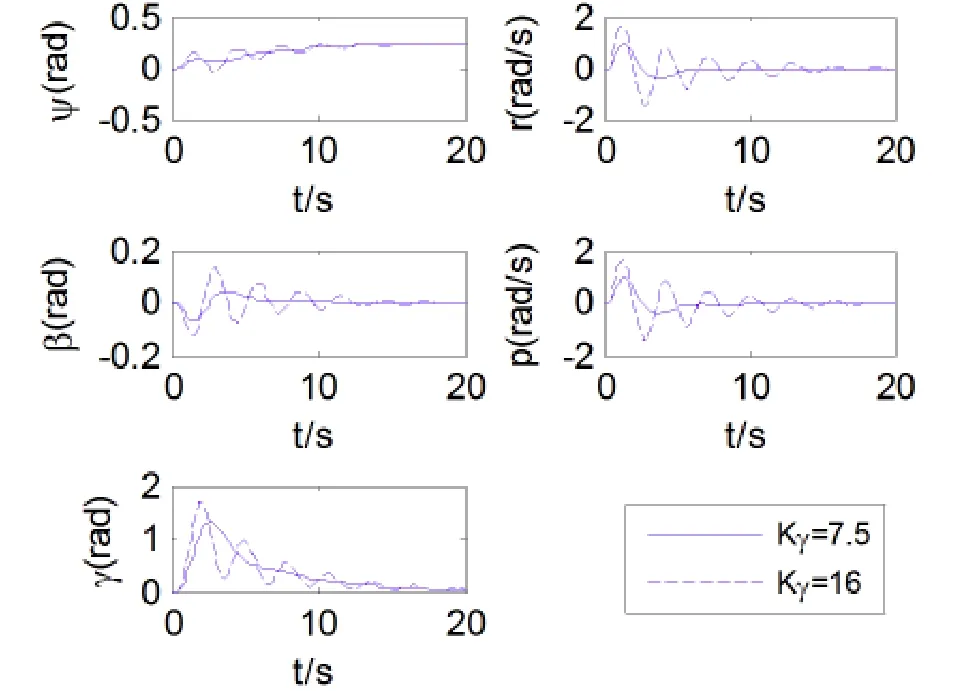
图3 内环放大系数对横航向PIO的影响
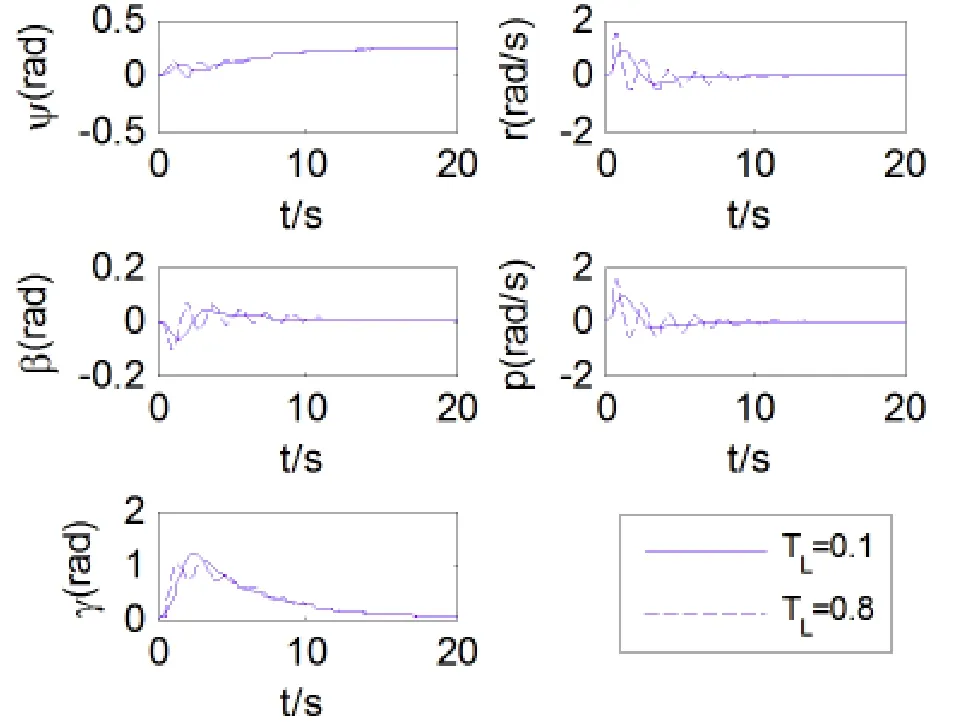
图4 超前时间常数对横航向PIO的影响
2.3 超前时间常数的影响
在图1中建立的Simulink仿真模型,使超前时间常数由小变大,对比其相应结果,如图4所示。
从仿真结果可以看出,在一定范围内,当超前时间常数增大时,响应变得震荡。因此,超前时间常数增大,飞机向产生横航向PIO方向发展。
2.4 惯性时间常数的影响
在Simulink仿真模型中,使惯性时间常数由大变小,对比其相应的结果,如图5所示。
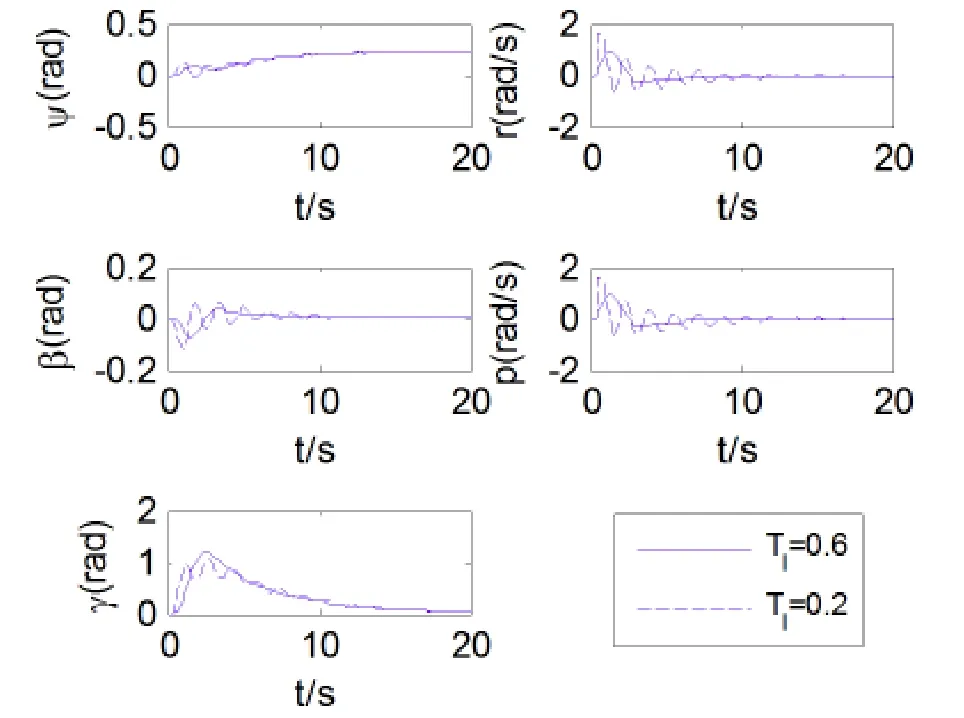
图5 惯性时间常数对横航向PIO的影响
从仿真结果的比较可以看出,在一定范围内,当惯性时间常数减小时,响应变得震荡,飞机向产生横航向PIO方向发展。
2.5 延迟时间的影响
在图1中建立Simulink仿真模型中,使延迟时间由小变大,对比其相应的结果,如图6所示。
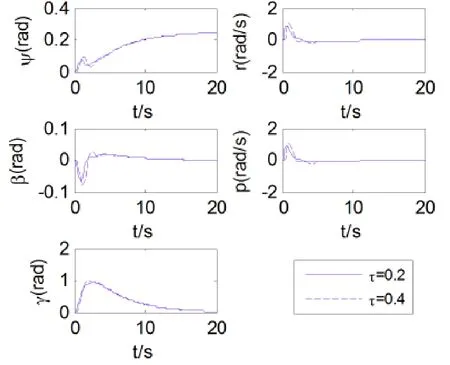
图6 延迟时间增大对横航向PIO的影响
从仿真结果的比较可以看出,在一定范围内,当延迟时间增大时,对响应有一定的影响,但不至于引起曲线的震荡。所以,延迟时间对横航向 PIO的影响不明显。
3 结语
横航向 PIO问题,是人—机系统闭环稳定性问题,而驾驶员是人—机闭环系统中的核心环节,其数学模型对人—机闭环特性的分析十分重要。所以研究驾驶员模型的中的参数对横航向 PIO的影响有着重要的意义。
从仿真结果可以看出,驾驶员模型中容易导致横航向 PIO的主要参数为内环放大系数,超前时间常数和惯性时间常数。因此,为了防止横航向驾驶员诱发振荡的产生,在对驾驶员模型中各参数设计时,应当使内环放大系数适当的小,超前时间常数适当的小,以及惯性时间常数适当的大的设计原则。
本文对横航向驾驶员模型中的参数对横航向 PIO的影响分别做了仿真分析,对驾驶员模型中的参数设计和横航向 PIO问题的研究具有一定程度的理论价值和工程指导意义。
[1]Standard M.Flying Qualities of Piloted Aircraft [R].MIL-STD-1797A,Department of Defense,1990.
[2]管萱.驾驶员诱发振荡_PIO_的研究[D].南京航空航天大学,2010.1.
[3]MIL-F-8785C军用规范——有人驾驶飞机的飞行品质[S].飞行力学编辑部,1982.
[4]Bjorkman E A,Silverthorn J T,Calico R A.Flight Test Evaluation of Techniques to Predict Longitudinal Pilot Induced Oscillations[R].Air Force Institute of Technology Wright-Patterson AFB,Ohio, 1986.
[5]Smith J.W.Analysis of a longitudinal pilotinduced oscillation experienced on the approach and landing test of the space shuttle[J].NASA TM-81366, December,1981.
[6]高庆玉,方振平.飞机纵向驾驶员诱发振荡灵敏度分析[J].飞行力学,1998,16(3):28-33.
[7]刘继权,豆国辉,颜世伟.驾驶员模型对驾驶员诱发振荡评估结果的影响[J].航空计算技术,2012,42(4):43-46.
[8]朱恩,王蔚楠,郭锁凤.驾驶员诱发振荡的抑制方法[J].飞行力学, 1998,16(1):60-64.
[9]高金源,李陆豫,冯亚昌.飞机飞行品质[M].北京:国防工业出版社, 2003.
[10]鲁道夫·布鲁克豪斯.飞行控制[M].北京:国防工业出版社, 1994.
[11]陈廷楠,傅见平,张广军.横航向驾驶员诱发震荡研究及地面模拟验证[J].飞行力学, 1992, 10(2): 69-75.
[12]Kish B A,Leggett D B, Nguyen B T, et al. Concepts for detecting pilot-induced oscillation using manned simulation[C].Proceedings of the AIAA Flight Mechanics Conference,San Diego(CA),1996:559-568.
[13]McKay K,Summary of an AGARD Workshop on pilot induced oscillation[C].AIAA Guidance,Navigation and Control Conference, Scottsdale,AZ,Aug,1994.
[14]王永熙.飞行控制系统对驾驶员诱发振荡的影响[J].航空学报,1997,18(1): 18-22.
[15]何志凯,高正红.驾驶员模型参数与PIO易感性关系研究[J].科学技术与工程.2012,12(10):2358-2363.
