基于UG的新型自动炒锅配套锅盖虚拟设计与运动仿真
2013-09-12武美萍
韩 威,武美萍
(江南大学机械工程学院,江苏无锡 214122)
基于UG的新型自动炒锅配套锅盖虚拟设计与运动仿真
韩 威,武美萍
(江南大学机械工程学院,江苏无锡 214122)
针对当今社会人们对身体健康的重视和市场上现有自动炒菜锅的现状,提出了新概念健康厨房的特点和概念。运用UG软件,对新型自动炒锅配套锅盖进行结构设计、虚拟装配,使机构的造型形象化、可视化。同时针对设计中出现的问题做出了改进,实现了对该系统在工作过程的运动仿真,使原来在二维图纸上难以表达和设计的运动变得非常直观和易于修改。UG软件的应用为该自动炒锅配套锅盖的整体设计及优化提供了技术支持,缩短了研发周期,节约了研制经费,并为后续研究奠定了良好基础。
新型自动炒锅配套锅盖;虚拟装配;虚拟设计;运动仿真
随着社会的发展,人们越来越重视自身的健康,做菜时油烟对人体的危害以及饮食健康等问题早就成了人们关注的焦点。目前炒菜做饭大多停留于人工操作阶段,已产生多种弊端。而仅有的几种自动炒锅不是价格昂贵就是操作复杂繁琐,且很难实现对菜料的均匀加热,由于翻炒菜料不彻底,从而出现焦糊或者未熟等问题。针对现实情况,提出新概念健康厨房的构想,让人远离油烟就能做出美味可口的饭菜,从而避免做菜时油烟对人体的危害。同时,可按照人体所需,科学地制定菜谱、合理控制各种调味品的加入量(避免人体过多摄入食用油或食盐等调味品),从而严格保证人们的饮食健康,避免出现三高等现代人普遍容易患上的疾病。因此,有必要对此构想的核心部分——新型自动炒锅配套锅盖进行深入的研究与探讨。新型自动炒锅配套锅盖可实现菜料的全方位翻炒,使其受热均匀,能烹饪出更加美味的菜肴,并具有安全方便、使用寿命长等特点,可在“自动炒菜锅和厨房一体化”领域做进一步推广。
1 虚拟样机技术简介
虚拟样机技术(Virtual Prototyping,VP)是一种崭新的产品开发方法,它是一种基于产品的计算机仿真模型的数字化设计方法。具体说来就是在建造第一台物理样机之前,设计师利用计算机技术建立产品系统的数字化模型,进行仿真分析并以图形方式显示该系统在真实工程条件下的各种特性,从而修改并得到最优设计方案的技术[1]。机械系统虚拟样机技术,是指在机械系统的设计开发过程中,综合运用相关的先进技术手段,在计算机上建造出机械产品的模型,并对该机械系统整体在投入运行后的工作情况进行分析研究的一种高新技术手段[2]。
虚拟样机技术是近些年在CAD、CAE、CAM等技术基础上发展起来的,融合了现代信息技术、虚拟仿真技术和先进制造技术,将分散的产品设计开发和分析过程集成在一起,是一种从系统的层面由上至下的复杂系统开发模式。利用虚拟样机代替物理样机对产品进行创新设计、测试和评估,可以缩短产品开发周期,降低产品开发成本,提高产品设计质量,提高面向客户与市场需求的能力[3]。
2 新型自动炒锅配套锅盖工作原理
新型自动炒锅配套锅盖结构图如图1所示,包括主体部分和一套完整的动力输出与传动系统。其中主体部分包括锅盖、底板和封装盒;动力输出和传动系统包括布置在顶部的电动机、主轴、连接电动机和主轴的联轴器、一对相互啮合从而实现自转和公转的锥齿轮、一组用于传动的直齿圆柱齿轮、一把铲刀、若干轴承。
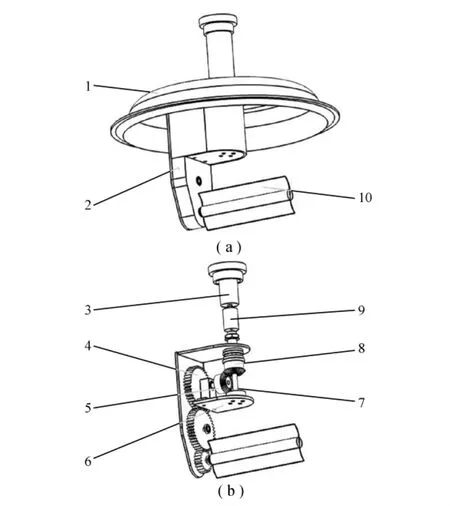
图1 新型自动炒锅配套锅盖结构图
具体实施方式如下:首先,将菜料放入锅中加热,然后盖上锅盖1,接通电源,打开电动机开关,电动机3通过联轴器9带动封装盒2的底板6,在使得锥齿轮8开始绕着轴7转动的同时实现铲刀10的公转运动,在此过程中铲刀会缓慢的向下移动直至锅盖密封炒锅。由于锥齿轮8不转动,锥齿轮5会沿着锥齿轮8的外轮廓做自转运动,传到直齿圆柱齿轮4处的转动会经过两级齿轮传动传到铲刀处,从而实现铲刀的自转运动。在这个过程中,铲刀的公转周期为4s/圈,自转周期是公转周期的3~4倍,由齿轮的传动比实现。
本设计与人工翻炒相比,速度相对稳定,对菜料运动的掌控度更高,效率较高;与现有的自动炒菜技术相比,实现了菜料的全方位翻炒,使其受热均匀,能烹饪出更加美味的菜肴。
3 基于UG的三维建模
UG的建模方式根据建模对象的不同可以分为实体建模、曲面建模和混合建模,根据建模方式的不同又可以分为参数化建模和非参数化建模[4]。
3.1 新型自动炒锅配套锅盖零部件设计
在UG中,生成零件的方法有很多,即使是同一个零件也可以采用多种成形方法。新型自动炒锅配套锅盖的主要零部件有轴、联轴器、齿轮、轴承、轴承支架、锅盖、铲刀等。在对以上零部件的三维建模过程中主要采用的方法[5]有:
a.拉伸和回转成形。通过拉伸,可以将截面线圈沿着指定方向拉伸一段距离来创建拉伸实体;通过回转,可以将截面线圈绕一根轴线旋转一定角度形成回转特征体。图2所示零件采用的就是拉伸和回转成形。

图2 拉伸和回转成形
b.打孔成形。孔特征在设计中经常会碰到,创建的孔的类型包括“常规孔”、“钻形孔”、“螺钉间隙孔”、“螺纹孔”和“孔系列”(沉头孔)等。设置好孔类型后,一般还要定义孔放置位置、孔方向、形状和尺寸(或规格)等。图3所示零件为常规的沉头孔。

图3 打孔成形
c.曲面成形。“一般曲面”的创建主要分为“依据点创建曲面”、“由曲线创建曲面”和一些其他的创建方法(其典型方法命令有“规律延伸”、“轮廓线弯边”、“偏置曲面”、“修剪与延伸”和“分割面”等)。图4所示零件为通过曲线网格创建的曲面,即通过一个方向的截面网格和另一个方向的引导线来创建片体或实体。
此外还有扫掠、布尔运算和抽壳等成形方法以及倒斜角、边倒圆、面倒圆、样式圆角、样式拐角和美学面倒圆等多种进一步修饰方法,以获得更细的模型结构。另外,值得一提的是,在 UG NX 7.5中,系统为用户提供了“GC工具箱”这类新的本地化软件工具包,在本次建模过程中进行了多次应用,如调用齿轮、轴承等。通过应用“GC工具箱”,大大提高了进行产品设计时的标准化程度和工作效率。
图4 曲面成形
3.2 新型自动炒锅配套锅盖虚拟装配设计
在进行装配设计时主要有2种方法:自下向顶(Down-Top Design)和自顶向下(Top-Down Design)[6]。
自顶向下设计是由整体到局部的设计方法,适用于对某些成熟产品,或虽是初次设计但对整个组件所包含的零件数目及空间位置关系都清楚的场合。采用自顶向下的设计方法可以将设计思想一步一步向下传递,并逐步完善,像画一棵大树一样,先考虑树干,再充实枝条,最后完善树叶。这样,树干的变化就等同于主设计参数的变更,从而可以保证设计思想有效向下传递。自顶向下设计的基本步骤是:设计产品中各个组件的逻辑关系,即在设计树上添加新组件或新产品;在线架零件中添加主要尺寸;利用已有各主要尺寸生成零件;根据主控尺寸,调整线架零件尺寸,进而直接调整各个零件尺寸。
自下向顶是一种从局部到整体的设计方法,当装配体中零部件较少,或包含有较多重复出现的零部件,或装配体零部件之间的配合关系较为简单时,优先考虑此方法。在一般情况下,将两者结合起来使用会取得更好的效果。新型自动炒锅配套锅盖的最终装配图如图1所示。
UG NX 7.5的装配功能提供了7种不同的约束类型,分别是接触对齐、角度、中心、平行、垂直、距离、同心。在装配时通过选择恰当的约束类型,可以将各零件按照现实中的情况进行拼装,并最终组合成一个完整的三维实体模型。虚拟装配环境中的装配建模是通过三维可视化图形界面以及对模型的三维操作实现的,虚拟装配的主要过程是在零件识别、特征对识别、特征元素约束的基础上完成的。当完成一个装配设计之后,还要进行许多后续工作才能保证虚拟装配的正确性。其主要工作包括:(1)干涉和间隙计算,主要用于检测零件之间的间隙大小以及是否存在干涉现象;(2)约束分析,主要用于对一个活动主件的约束进行分析,可以分类展示所有约束;(3)从属分析,利用关系树可以观察组件和约束之间的依附性和从属性;(4)更新分析,在大型装配时,可以检测移动组件与添加约束对整体装配的影响;(5)自由度分析,在不牵涉到零件设计时的约束的情况下,可以检测当前组件是否需要添加或减少约束。
装配体爆炸图是工程实践中体现结构空间位置及其关系的有效手段,因此在某些场合特别是维修过程中,爆炸视图有着不可忽视的作用,新型自动炒锅配套锅盖的装配爆炸图如图5所示。
4 机构虚拟运动仿真
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
UG/Motion可以对运动机构进行大量的装配分析和运动合理性分析,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。通过对运动仿真模型进行运动学或动力学分析,可以验证该运动机构设计的合理性,以便对机构进行优化。运动仿真模块自动复制主模型的装配文件,并实现一系列不同的运动仿真,每个运动仿真均可独立修改,而且不影响装配主模型,一旦完成优化设计方案,即可直接更新装配主模型,以反映优化设计的结果[7]。
利用UG建立新型自动炒锅配套锅盖三维实体模型后,并不能直接将各个部件按一定的连接关系连接起来,必须给各个部件赋予一定的运动学特性,让其成为一个可以与别的有着相同特性部件之间相连接的连杆构件。同时,为了组成一个能运动的机构,必须把相邻的构件以各种运动副连接起来,并设置原动件、从动件和机架。这样,就建立了一个新型自动炒锅配套锅盖的运动仿真模型,其运动仿真各状态时效果如图6和图7所示。

图6 外观仿真效果图
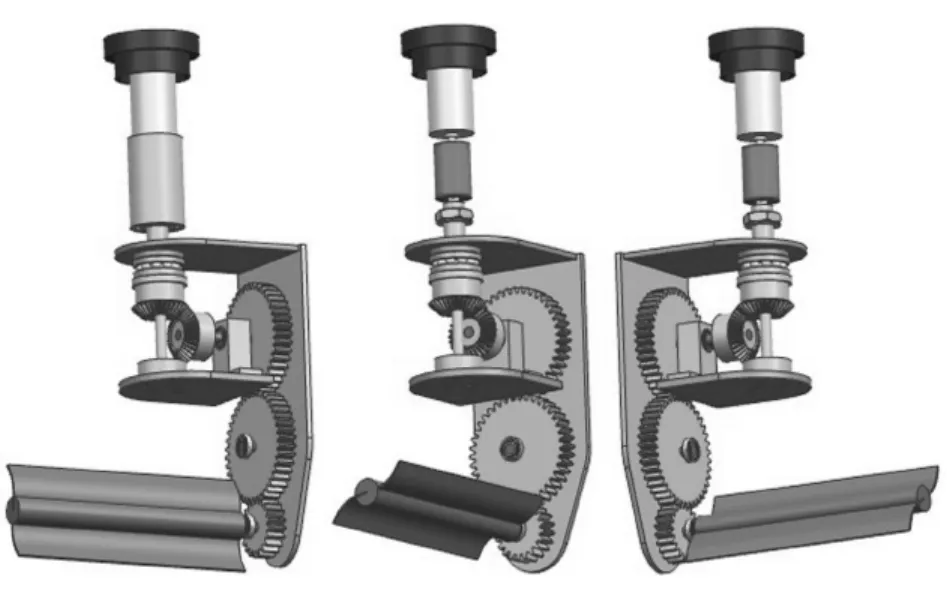
图7 内部结构仿真效果图
5 结束语
作为新概念健康厨房的核心部分,新型自动炒锅配套锅盖的研发充分考虑了当今社会发展的趋势和需求,对家电厨具自动化领域乃至人们日常生活整体质量的提高都具有重要意义。在研究中,针对现有自动炒锅的薄弱环节进行了大胆创新,在铲刀轨迹方面,考虑到普通的自动炒锅对片状的菜翻炒不够,本产品的铲刀加上了自身的翻转,使菜料能得到充分翻炒,不仅将人从厨房的油烟中解放出来,还能够做出既营养又可口的菜肴,提高人们的生活质量。
通过UG强大的实体建模与动态虚拟装配功能,建立了新型自动炒锅配套锅盖三维实体模型,并通过UG/Motion模块对模型进行运动仿真,不但使机构的造型形象化、可视化,而且也使整个仿真过程精确、高效,这是传统的静态方法无法比拟的。整个虚拟设计与运动仿真过程解决了大量的机构匹配和运动合理性问题,优化了设计方案,文中设计的基于UG的虚拟样机,为以后的继续深入研究提供了良好基础。
[1]王立权,王晓东,陈德望,等.基于虚拟样机的控制系统仿真研究[J].哈尔滨工程大学学报,2000(6):26 -29.
[2]张旭,毛恩荣.机械系统虚拟样机技术的研究与开发[J].中国农业大学学报,1999(2):94-96.
[3]张悦刊.基于虚拟样机技术的液压支架设计方法研究[D].青岛:山东科技大学,2007.
[4]夏德伟,张俊生,陈树勇,等.UG NX 4.0中文版机械设计典型范例教程[M].北京:电子工业出版社,2006.
[5]博创设计坊.UG NX 7.5完全自学手册[M].北京:机械工业出版社,2010.
[6]野火科技.UG NX 7.5产品设计一体化解决方案[M].北京:机械工业出版社,2011.
[7]胡小康.UG NX6运动仿真培训教程[M].北京:清华大学出版社,2009.
Virtual Design and Moving Simulation for Cover of Automatic Cookware Based on UG
HAN Wei,WU Meiping
(Jiangnan University,Jiangsu Wuxi,214122,China)
According to the automatic cookware in existing market and the orientation of healthy life in society nowadays,it introduces the characteristics and ideas of the new concept healthy kitchen.Using UG software,it designs the structure and virtual assembly of this automatic cookware cover,realizes the moving simulation in working process,provides an easy understanding and a possibility to modify directly.The UG software provides some technical supports to the overall design of this cover of automatic cookware and a good foundation of the follow-up researches,shortens the period of the design and saves the development budget.
Cover of Automatic Cookware;Virtual Assembly;Virtual Designs;Moving Simulation
TH12;TH16
A
2095-509X(2013)02-0014-04
10.3969/j.issn.2095 -509X.2013.02.004
2012-12-05
韩 威(1990—),男,河北唐山人,江南大学本科生,专业方向为机械工程及自动化。