背衬封装对卧板式直线超声电机输出推力影响
2013-09-10李朝东
张 露,李朝东
(上海大学 上海市机械自动化与机器人重点实验室,上海 200072)
近十几年来,国际上对微型直线电机研究与开发十分活跃[1]。在多种新型微直线电机中,超声电机因具有直接驱动、结构简单、功率密度大、无电磁干扰、动作响应快、无电输入自锁、可用于真空或强磁环境等卓越特性成为开发热点,并发展迅速。其中卧板式直线超声电机占空间小,尤其适用于微型机械装置[2-3]。但该电机因受定子结构限制在使用中输出推力不大,主要由于产生的垂直于轨道面振动力较小,无法承载较大预压力,限制了输出推力的提高。而电机封装方式不合理也是影响输出推力的重要原因。
通常卧板式电机封装方式一般在弹性体对称中心位置,即振动节点处局部固定。Zhai等[4]研制的振子宽度为7.7 mm卧板式电机,承载最大预压力为800 gf,最大输出推力为95 gf。Park等[5]研制的振子宽度为5 mm卧板式电机,承载最大预压力为550 gf,最大输出推力为180 gf。Rho等[6]研制的振子宽度为10 mm卧板式电机,承载最大预压力为7.99 N,最大输出推力为3.99 N。上述封装方式可减少对电机定子振动约束,获得较大振幅,从而获得较大速度输出。但预压力传递路径不合理,亦会导致预压力承载能力受限制。
本文以振子宽度5 mm卧板式直线超声电机为研究对象,试图由预压刚度角度寻求能有效提高卧板式直线超声电机输出推力的途径,以扩大应用范围。并设计出不同封装方式,建立电机振动模型,进行预压力加载实验,分析电机封装方式对电机振动本质参数影响。
1 卧板式直线电机封装分析
1.1 卧板式直线超声电机简介
本文研究的卧式板型超声电机属模态复合型直线超声电机[8],见图 1。轮廓长 36 mm,宽 5 mm,高 4 mm。通过对该电机上下表面粘贴两组压电陶瓷施加两相位差为90°的特定频率简谐交流电压,下表面压电片在电机弹性体上激发水平方向纵振模态,上表面压电片激发垂直方向弯振模态,两种模态复合,在与导轨接触的两驱动足上产生相位差180°椭圆运动。
1.2 卧板式电机不同封装方式
本文通过设计几种封装方式,研究不同封装形式对电机承载预压力能力及输出推力影响。
1.2.1 刚性紧定螺钉夹持
卧板式直线超声电机通常采用紧定螺钉在电机节点处夹紧电机的预压封装方式,如图2所示。该方式使电机中部受预压力作用,限制电机在水平、竖直方向的线位移,但对电机绕夹持点的刚性转动约束较小。
1.2.2 全背面分布式背衬封装
在电机背面垫弹性塑料分布式背衬,构成背衬式封装(图3)。该封装可使整个电机背部承受预压力作用,既限制电机在水平、竖直方向的线位移,也限制其刚性转动。
1.2.3 局部背衬封装
局部背衬封装是全背面分布式背衬封装的改进,仅在与驱动足相对的振子背面垫弹性片,其余敞开(图4)。局部背衬封装方式与全背面分布式背衬封装方式原理相同,均使电机背面分布受力,限制电机刚性转动,缩短电机力的传递路径,两者区别在于局部式有利于改善电机的散热性能。

图1 卧板式超声电机结构示意图Fig.1 Board-type horizontal linear ultrasonic motor

图2 紧定螺钉夹持示意图Fig.2 Fixation of set screw

图3 全背面分布式背衬示意图Fig.3 Whole back ofdistributing flexible supporting

图4 局部背衬示意图Fig.4 Partial back of distributing flexible supporting

图5 棒形直线超声电机纵向振动模型Fig.5 Longitudinal vibration model
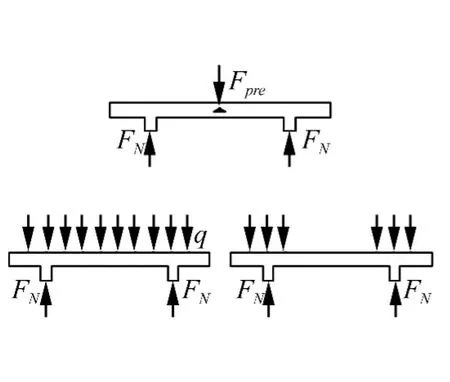
图6 力传递路径示意图Fig.6 Force transmission path
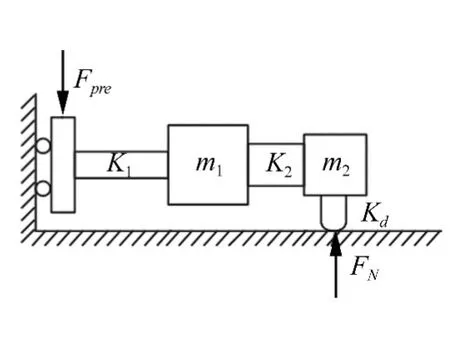
图7 振子力学模型Fig.7 Mechanical model

图8 自由振动模型Fig.8 Free vibration model
2 不同封装形式理论模型分析
2.1 力传递路径分析
图5为棒形直线超声电机纵向振动基本模型[9]。该模型为单自由度非线性强迫振动系统,在驱动振子振动节面处将驱动振子缩聚为集中质量M,下部为弹簧Kd。M上方为预压弹簧Ku,F为由弹簧变形产生的预压力。
实验表明,随预压力的增大,电机输出趋于硬特性。且增大预压弹簧刚度可加大电机输出推力。由力传递路径角度分析以上三种预压方式,分为两类:①预压力通过封装作用在电机节点处,力的传递路径示意图见图6(a),FN为驱动足处界面支反力;② 预压力经背衬式封装后均匀分布在电机全部或局部上方,力传递路径见图6(b),可见力的传递途径明显缩短。
2.2 非背衬式封装力学模型分析
由于只考虑预压力的承载能力,此处不讨论振子沿导轨方向纵向振动。电机在垂直方向弯振产生的能量可描述为:
为用统一的力学模型描述电机运动,从能量角度将电机转动动能经式(1)变形,用质量、刚度分析。

式中:ri为该点与质心间距离。由此建立等效力学模型。考虑对称性,取振子一半建立模型见图7。图中,m1为转换成线性位移质量的振子刚体转动质量,K1为转换成线性弹性刚度的振子刚性转动约束刚度(此二参数由刚体转动能量转化而来);m2为振子质量,K2为振子抗弯刚度(此二参数描述振子平动)。Fpre为振子所受预压力,Kd为驱动足与导轨面间的弹性刚度。FN为导轨对驱动足支反力。
按图7模型描述电机工作并产生推力输出的力学行为:压电元件激发振子产生弯曲模态,形成上下振动。在与导轨接触过程中,除振子质量积聚的动能克服外力做功外,振子弹性体内储存的弯曲变形能也克服外力做功。动能与振子质量存在一定比例关系,弯曲变形能与振子抗弯刚度存在一定比例关系。因只做定性分析,故分别用m2,K2代表振子质量及抗弯刚度。
在不加预压力情况下,振子因振动产生的应变能,因无封装机构提供反作用力,故无能量转换为有效输出,仅有驱动足依靠动能做功产生驱动所需的正压力,此时振子振动的力学模型简化为图8形式。图中m2,K2同图7。
对紧定螺钉夹持方式,振子抗弯刚度K2与约束刚度K1为串联关系。约束刚度K1为电机节点处材料刚度,在此种夹持方式下,由于振子刚体转动需克服的扭转力矩较小,因而电机可绕夹持点刚性转动,但刚体转动转换成驱动足对接触界面法向力做功能力很小。具体表现为图7模型中约束刚度K1值较小。
由于紧定螺钉与电机的接触面积小,因而当预压力持续增大时,会将节点处压溃,出现图9情形。此时继续增加预压力无法有效转换为动力输出,即输出能力受到限制。
2.3 背衬式封装力学模型分析
全背面分布式背衬封装力学模型见图10。预压力由原施加在振子的中点处,变为作用在振子刚体转动质量(即m1)上方。K3为背衬封装提供的额外预压刚度。

图9 紧定螺钉夹持压溃模型Fig.9 Crushing model of set screw fixation

图10 背衬式封装力学模型Fig.10 Back packaging model
该封装刚性转动约束刚度K1不仅包含振子刚度,而且增加了背衬材料刚度,较紧定螺钉夹持方式明显增大,可为振子弹性体弯曲变形能输出提供足够支持,故能将预压力有效传递到驱动足上,作为法向作用的主要贡献力。增加的预压刚度K3又使电机振动质量m2克服外力做功的能力有所加强。其中,K1、K3为并联关系。局部背衬封装方式与全背面分布式背衬封装方式相同。
对同一电机不同形式封装其实际效果可使K1、K3发生相应变化。在只考虑弯振产生上下振动情况下,参考棒形直线超声电机纵向振动基本模型(图5),据K1、K2、K3对系统的作用效果,建立电机振动等效刚度模型见图11。图中,m*、K*为压电陶瓷与弹性体组成的单自由度振动单元振动质量与刚度。M、K分别为电机与封装组成的振动系统集中质量与系统等效刚度。
约束刚度K1与振动刚度K2串联后与预压刚度K3并联,因而系统等效刚度K为:
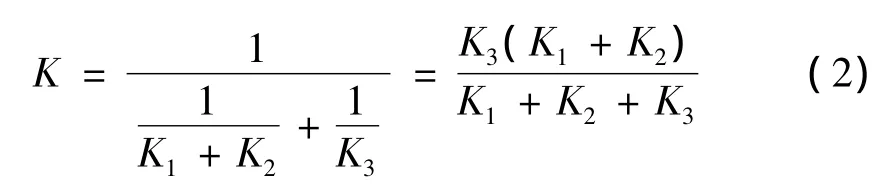
对比图5,等效刚度K对系统产生的作用与Ku对系统产生的作用相似。本文不考虑驱动足与导轨的接触刚度Kd变化情况,只讨论K对系统产生的影响。在其它参数不变时,增大K1或增加K3均会使K增大,从而使电机能承受更大预压力。
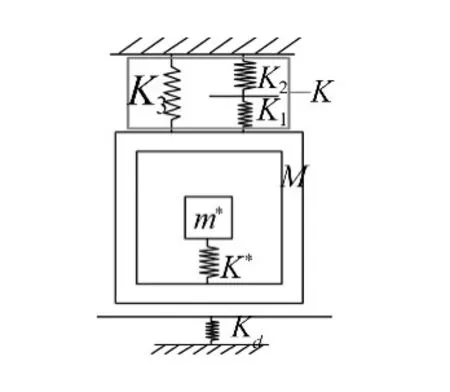
图11 电机振动等效刚度模型Fig.11 Equivalent stiffness model
3 等效刚度有限元分析
据等效刚度模型,不同的封装方式等效刚度K值也不同。本文考虑5种不同封装类型,用ALGOR有限元分析软件对系统作静力分析,拟求出各等效刚度值。
分析方法为将电机按某一种方式固定,在电机单侧驱动足处施加竖直向上10 N/mm2均布压力(驱动足端面面积为5 mm2),据K=F/S及式(2)求得各等效刚度K见表1。由表1可知,背衬式封装使电机等效刚度大大提高。
4 电机封装预压力承载实验
将卧板式直线超声电机分别用紧定螺钉夹持、全背面分布式背衬封装及局部背衬封装三种方式装夹在封装结构中,并置于导轨上进行预压力承载能力测试。测试过程为:在电机整体上加挂砝码以施加预压力,记录能使电机实现行走的最大砝码质量,并换算成相应的力。在最佳共振频率f=63.996 kHz、激振电压为Vpp=150 V情况下,测得不同封装形式的电机预压砝码质量-速度曲线见图12。相应的预压力值可由砝码质量转化。

表1 不同夹持封装方式对电机刚度的影响Tab.1 The effect of different package ways on stiffness
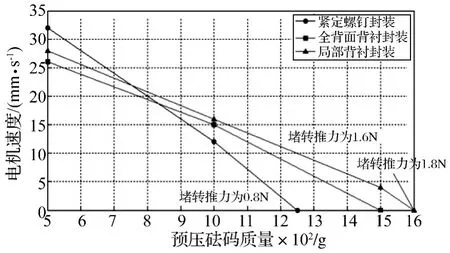
图12 预压砝码质量-速度曲线Fig.12 Preload-speed curve
实验结果显示,用背衬式封装可有效提高电机预压力承载能力,三种方式能承受的预压力与有限元分析结果等效刚度存在相同变化趋势,背衬式封装方式等效刚度较大,承受的预压力也较大,且输出推力较紧定螺钉夹持方式大两倍以上。
5 结论
(1)本文针对振子宽度5 mm卧板式直线超声电机的几种封装夹持方式,建立振子力学模型,从理论模型角度分析了封装对电机系统等效刚度影响,并利用有限元分析获得验证。
(2)通过预压力加载实验,测得几种封装方式各自能承载的最大预压力。其中,激励信号电压为150 Vpp频率为63 kHz时,对电机施加局部背衬封装方式,电机能承受的最大预压力为16 N。实验结果与理论模型分析结果吻合。
(3)通过对用背衬方式提高卧式电机输出推力方面的初步探讨认为,对背衬材料本身、背衬安装方式及电机能量转换效率等仍需深入研究。
[1]李朝东.微电机研究的最新动态与应用展望[J].微特电机,2003(1):3-6.
LI Chao-dong.Thenewestdevelopmentand application foreground of the research of micro-motors[J].Small &Special Electrical Machines,2003(1):3-6.
[2]李朝东,何晓菁.卧式板型直线超声电机的微型化[J].光学精密工程,2010,18(4):887-892.
LI Chao-dong,HE Xiao-jing.Miniaturization of board-type horizontal linear ultrasonic motor[J].Optics and Precision Engineering,2010,18(4):887-892.
[3]潘 松,黄卫清,王 寅,等.基于压电作动器的直线电机及其高效驱动[J].光学精密工程,2011,19(10):2464-2471.
PAN Song,HUANG Wei-qing,WANG Yan,et al.High efficiency driving of linear motor based on piezoelectric actuator[J].Optics and Precision Engineering,2011,19(10):2464-2471.
[4]Zhai B,Lim S P,Lee K H,et al.A modified ultrasonic linear motor[J].Sensors and Actuators,2000,86(3):154-158.
[5]Park T G,Kim B J,KIm M H,et al.Characteristics of the first longitudinal-fourth bending mode linear ultrasonic motors[J].Japanese Journal of Applied Physics,2002,41(11):7139-7143.
[6]Rho J S,Kim B J,Lee C H,et al.Design and characteristic analysis of l1b4 ultrasonic motor considering contact mechanism [J]. IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2005,52(11):2054-2064.
[7]何晓菁.细直径直线超声电机的微型化研究[D].上海:上海大学,2010.
[8]李朝东,程 凯,姚 华.直线型驻波超声电机的建模与仿真研究[J].机电一体化,2002(2):21-24.
LIChao-dong, CHEN Kai, YAO Hua. Modelingand simulation of a linear standing wave ultrasonic motor[J].Mechatronics,2002(2):21-24.
[9]李朝东.直线型压电驻波超声电机的研究[D].南京:南京航空航天大学,1998.
