海洋铺管船用张紧器履带机构运动学分析
2013-09-07张仕民杨树松
孙 亮,张仕民,杨树松
(1.中石化石油工程建设有限公司,北京100101;2.中国石油大学(北京)机电工程学院,北京102249;3.渤海石油装备制造有限公司 研究院,天津300280)*
目前,我国海洋深水铺管船用张紧器相关技术研究和产品开发还处于起步阶段,经过对国外技术详细调研和三维模型设计,已完成了张紧器的整体设计和张紧器内悬架的设计与分析[1-3]。船用张紧器履带机构模型如图1所示,由于张紧器的履带机构与履带式工程机械底盘差别很大,不能照搬履带式机械行走机构的理论来进行运动学分析。本文在借鉴履带式机械运动学理论的基础上,对张紧器的履带机构进行了运动学分析。
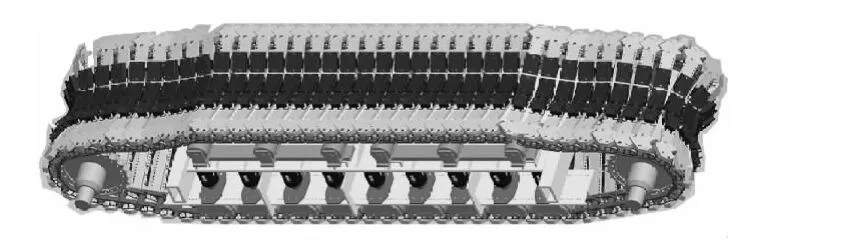
图1 船用张紧器履带机构模型
1 履带的简化和各段名称
张紧器履带机构运动学分析中的履带,不是实际的真实履带,而是一种简化了的履带。这种简化的履带是1条不可拉伸、无质量、无厚度、闭合的柔性带。由于履带是1条闭合的柔性带,所以其形状取决于张紧器驱动轮、引导轮、支重轮、托带轮的相互位置和各轮半径的大小[4]。为了便于说明履带运行原理,可将履带分成几个区段(如图2所示):1~3称为驱动段;4~7称为上支段;8~10称为前方区段;10~1为下支段。
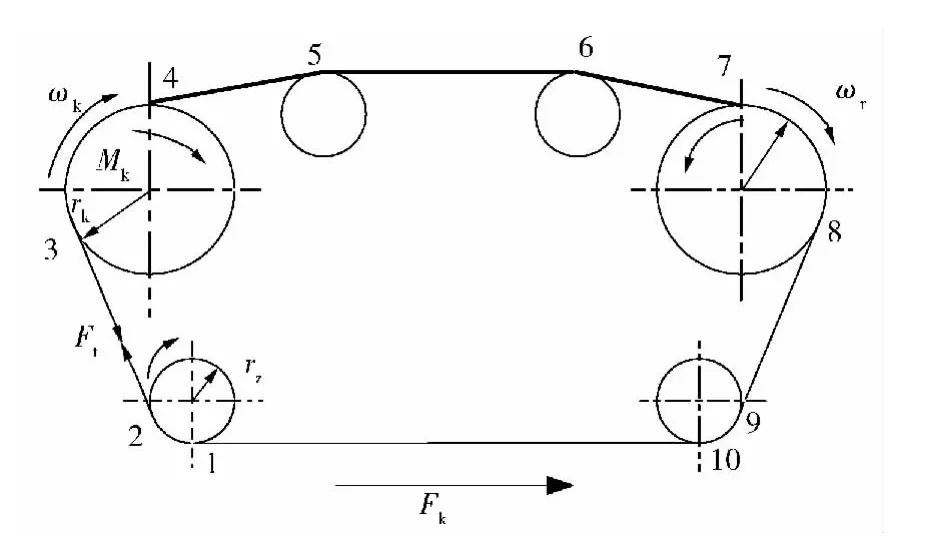
图2 履带各段名称及运动原理
2 运动原理
如图2所示,张紧器履带机构运动时,在驱动力矩Mk作用下,驱动段内产生拉力Ft,Ft的大小等于驱动力矩MK与驱动轮动力半径rk之比,即Ft=。拉力F是内力,它力图把履带下支段从支重t轮下拉出,致使管子表面对下支段的履带板产生水平反作用力。这些反作用力的合力Fk称作履带机构的切线阻力。
为了分析切线阻力Fk是如何传到履带机构机体上的,可在驱动轮轴上加2个大小相等、方向相反的力Ft,如图3所示。其中一个力与驱动段内拉力Ft形成力偶,其值等于驱动力矩Mk;另一个力则可分解成平行和垂直于管子表面的2个分力和其中=Ftcosα。同理,将作用在后支重轮上的2个力都分别移到该支重轮轴线上,结果得到1个合力F∑。将合力F∑分解成分别与管道轴向平行或垂直的2个分力和,而=Fk-Ftcosα。作用在履带系统上的力应该是与之和,即

实际上,因为履带销和销孔间有摩擦,故Fk比Ft要小些[5]。
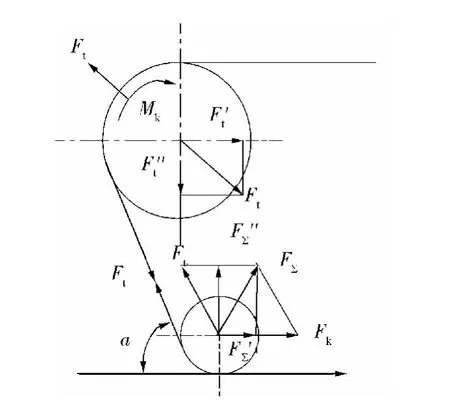
图3 履带切线阻力的传递
3 运动学分析
张紧器履带机构夹持并铺设管道的工作过程中,履带要作复合运动。它一方面相对于管道作直线运动,这种运动速度是相对速度,以vq表示;另一方面,履带又要作相对于履带机体的绕转运动,以vx表示。履带上某一点的绝对速度用vj表示,vq、vx和vj间的向量关系为

履带上各点的速度如图4所示。由图4可知,履带上不同点的速度是不同的。当vq和vx不在同一直线上其夹角为α时,履带上某点的绝对速度的代数式可表示为

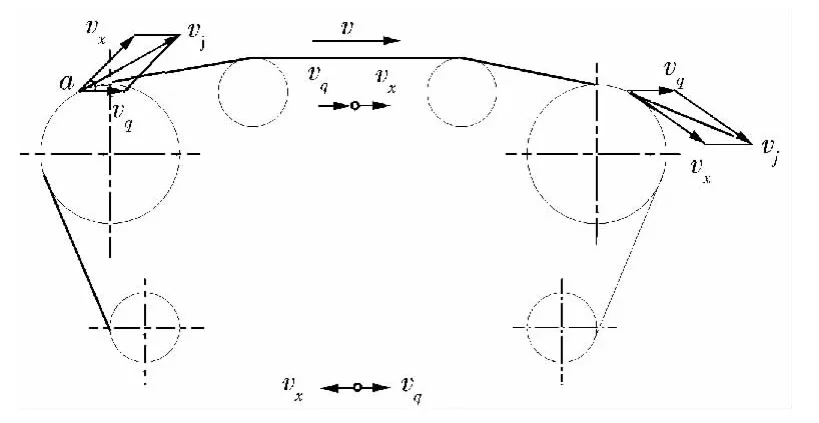
图4 履带上各点的速度
当上支段为水平直线时,vq和vx的夹角α=0°,式(2)变为

当下支段为水平直线时,vq和vx的夹角α=180°,式(2)变为

履带与管道接触的下支段是研究的重点,vq和vx的相互关系可分为以下4种情况:
1) 当vq=vx时,由式(4)得vj=0,说明履带与管道接触段的绝对速度等于零,履带是静止不动的。
2) 当vq<vx时,由式(4)得vj=vq-vx<0,说明履带与管道接触段的绝对速度小于零,为负值,即其绝对速度方向和履带机构相对管道运动方向相反。这种情况叫做履带接地段的滑转,张紧器正常工作时,其与管道接触的下支段都会产生部分滑转运动。
3) 当vq>vx时,由式(4)得vj=vq-vx>0,说明履带与管道接触段的绝对速度大于零,为正值,即其绝对速度方向和履带机构相对管道运动方向相同。这种情况叫做履带下支段的滑移,张紧器制动时,其下支段就会产生部分滑移运动。
4) 当vq=0,vx>0时,由式(4)得vj=-vx<0,说明履带与管道的接触段的绝对速度小于零,为负值,履带相对机体空转,张紧器履带并未接触管道或接触管道后未能拖动管道。这种情况是完全滑转运动,也叫打滑。
滑转和滑移的大小通常用滑转系数表示,是指接地段的滑转速度(vx-vq)和绕转速度vx之比,以σ表示,即

在张紧器夹持管道正常的铺管作业中,有vq<vx,由式(5)可知0<σ<1,这时履带与管道接触的下支段产生部分滑转,这属于履带机构的正常运行阶段。则履带的实际运行速度vs为

在张紧器夹持管道进行铺管作业中,若履带与管道表面之间无滑转时,即σ=0,则履带的运行速度就等于链轮与链轨传动时节圆的圆周速度,这时的履带运行速度即为理论速度vT。即

式中:l0为链轨节销孔的中心距离,m;z为驱动链轮的啮合齿数;ωk为驱动链轮角速度,rad/s;n为驱动链轮的转速,r/min。
综上所述,履带的实际运行速度即为履带机构拖动管道进行铺管作业的实际速度,可用式(6)表示[4,6-7]。
4 结语
对海洋铺管船用张紧器履带机构进行了分析,并介绍了履带的简化方法和各段的名称。在借鉴履带机构的基本理论基础上,给出了张紧器履带机构的运动原理,并对履带机构进行了运动学分析。对其他规格张紧器履带机构的分析有借鉴意义。
[1]曾 鸣,孙 亮,钟朝廷,等.海洋铺管船用张紧器内悬架的设计与分析[J].石油矿场机械,2010,39(6):32-35.
[2]杨 伟,叶 茂,何 宁,等.深水海底管道J型铺设工艺及设备研究[J].石油矿场机械,2013,42(1):14-20.
[3]何 宁,徐崇崴,段梦兰,等.J型铺管法研究进展[J].石油矿场机械,2011,40(3):63-67.
[4]闫清东.坦克构造与设计(下册)[M].北京:北京理工大学出版社,2007:74-78.
[5]吴永平,姚怀新.工程机械设计[M].北京:人民交通出版社,2005:23-24.
[6]秦四成.工程机械设计[M].北京:科学出版社,2003:46-48.
[7]Gianni Ferretti,Roberto Girelli.Modelling and simulation of an agricultural tracked vehicle[J].Journal of Terranmechanics,1999,36:139-158.
