面向助力机器人设计的人体负重楼梯行走下肢运动研究
2013-09-07韩亚丽赵国平高海涛朱松青
韩亚丽 赵国平 高海涛 朱松青
1.南京工程学院,南京,211167 2.东南大学,南京,211189
0 引言
下肢助力机器人是一种新型的具有可穿戴性能的机械装置,它包含两条与人腿类似的机械腿且并联于人体下肢外部,通过脚部、腿部及腰部的关联装置与人体紧密贴合,在人体行走的过程中进行助力。由于下肢助力机器人与穿戴者协同运动,实现负重行走的助力运动,故对人体的行走运动进行研究,分析不同运动模式下人体下肢各关节角度变化、力矩变化、功率消耗,揭示人体行走运动机理,将为助力机器人的机构设计、驱动选型提供重要依据。
楼梯行走是人们日常生活中一项很自然的行为运动,从机构学的角度来看,楼梯行走与平地行走有很大的差别,这种差别主要表现在下肢各关节角度运动变化的不同,研究此种运动变化产生的机理对助力关节的设计等有非常重要的意义。国外对楼梯行走运动研究起步较早。文献[1-5]对上、下楼梯过程中的下肢关节的运动变化进行了研究,文献[6-8]对关节置换术或腿部伤残者上、下楼梯的关节运动进行了研究。通过对楼梯行走运动分析,得出人体行走运动的特征,可用于指导体育训练、人体下肢康复运动评定、假肢的设计等[9]。国内对人体行走运动的研究起步较晚,且主要针对下肢正常者平地行走、坡道行走的步态分析进 行 研 究[10-14]。 唐 刚 等[15]进 行 了 上 楼 梯行走的实验研究,分析了上楼梯行走对关节角度变化的影响;刘建华等[16]进行了上、下台阶方法的研究,分析了不同方法上、下台阶时的肌肉收缩变化及关节力矩的差异;张瑞红等[17]对不同路况下的步态特征研究,分析了上楼梯时各关节力矩的变化。尽管国际上已有学者对楼梯行走运动进行了相关研究,但关于人体负重条件下进行楼梯行走的研究还不多见。本文对行走正常者在不同负重条件下的上楼梯过程中下肢运动变化进行分析,研究不同负重条件下的上楼梯行走过程中下肢各关节角度、关节力矩、关节功率变化情况,并研究上楼梯过程中,随着负重增加,各关节的运动变化趋势,旨在为下肢行走助力机器人的设计及控制提供理论依据。
1 人体行走运动实验方法
对12名健康的大学生进行行走实验,测试对象年龄为18~22岁,体重为51~61kg,身高为1.67~1.73m。测试对象均无下肢疾病病史。
实验设备为Motion Analysis公司开发的人体步态分析系统,人体步态分析系统包含图像采集系统及脚底测力系统。分布在行走实验区的6部红外摄像机对人体上楼梯运动过程进行采集,输出粘贴在测试对象身体关键部位的标记点(共22个标记点,每条腿7个,每个手臂3个,背部1个,腰部1个)的三维坐标,其采样频率为60Hz。脚底测力系统由嵌在行走轨道上的两块三维测力台组成,其长度为60cm,宽度为40cm,输出行走过程中足底力、力矩信息,采样频率为1200Hz。
进行楼梯的行走实验,首要的是进行楼梯的制作,为此,要精心考虑楼梯的坡度、踏步尺寸及楼梯的宽度。楼梯坡度的确定,应考虑行走的舒适性、攀登效率和空间状态因素。楼梯的坡度一般在20°~45°为宜,坡度最好为30°左右。踏步的尺寸包括高度和宽度,一般应与人脚尺寸步幅相适应。行走时感到舒适的踏步,一般都是高度较小、宽度较大,宽度以不小于240mm为宜,须保证脚着力点重心落在脚心附近,并使脚后跟着力点有90%在踏步上。楼梯的宽度则应根据场所要求而定。参照以上标准,经综合考虑,设计实验所需的楼梯尺寸如下:踏步高度为170mm,踏步宽度为270mm,梯段宽度为400mm,楼梯层数为3。其中梯段宽度由测力平台中的力板尺寸确定。
实验前,分别把3层楼梯置于测力台上并对测力台进行清零处理。测试者在测试现场内反复进行模拟行走,旨在熟悉行走路况,同时找出一种相对最易保持不变的行走速度,以消除实际行走实验中,行走速度的差异对实验结果造成的影响。进入实际实验阶段,测试者需尽可能地保持同一速度,进行不同负重状态(负重分别为0kg、10kg、20kg、30kg,质量块放在背后的背包内)下的上楼梯行走。在实验过程中,每进行完一次行走实验,测试者需坐下休息5min,以保持最佳的身体状态进行下一组行走实验。实验现场如图1所示。

图1 实验现场图
实验结束后,结合动力学模型,编程计算各类实验条件下的下肢关节角度、力矩及功率,并对输出结果采用SPSS软件进行方差分析。为了减小个体间的差异,对下肢关节角度的力矩及功率进行了规格化处理,把力矩及功率的参数数值对人体质量进行规格化。
2 人体行走运动分析方法
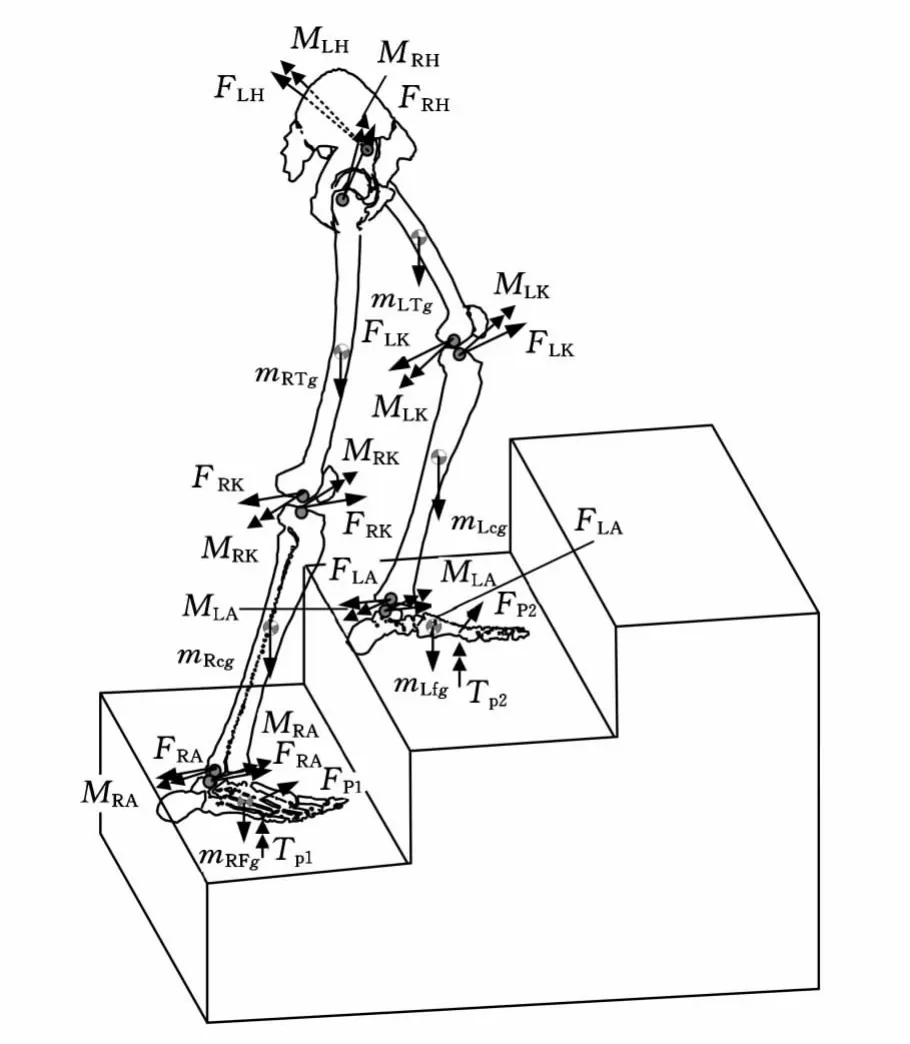
图2 下肢楼梯行走的力学模型简图
由发光标记点的位置坐标,可计算出人体行走运动过程中的运动学结果,如下肢各关节角度的变化θ,下肢大腿、小腿及足的加速度a[18]。同时根据文献[19]提出的人体测量学方法及人体运动分析方法,可获得用于步态分析的人体下肢大腿、小腿及足部的质量m、转动惯量I等参数。结合步态实验时测力板实验结果及人体动力学模型(图2),利用自行开发的步态分析系统程序,使用牛顿定理分别对下肢中的足部、小腿、大腿进行受力分析[20],可以计算出在各个步态时刻的关节力、力矩及功率,输出行走运动棍棒图(图3)。尽管人体行走运动包含矢状面、冠状面及横断面的运动,但其主要运动为矢状面运动,故本文仅对人体矢状面内的运动进行研究。
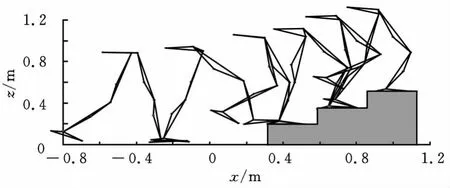
图3 楼梯行走棍棒图
3 人体行走运动实验输出结果及分析
3.1 楼梯行走过程中下肢各关节角度变化
不同负重条件下,上楼梯过程中,下肢各关节角度的变化曲线如图4所示,图4中,mL为负重。不同负重条件下下肢各关节角度曲线中关键点的数值(平均值及偏差)如表1所示。
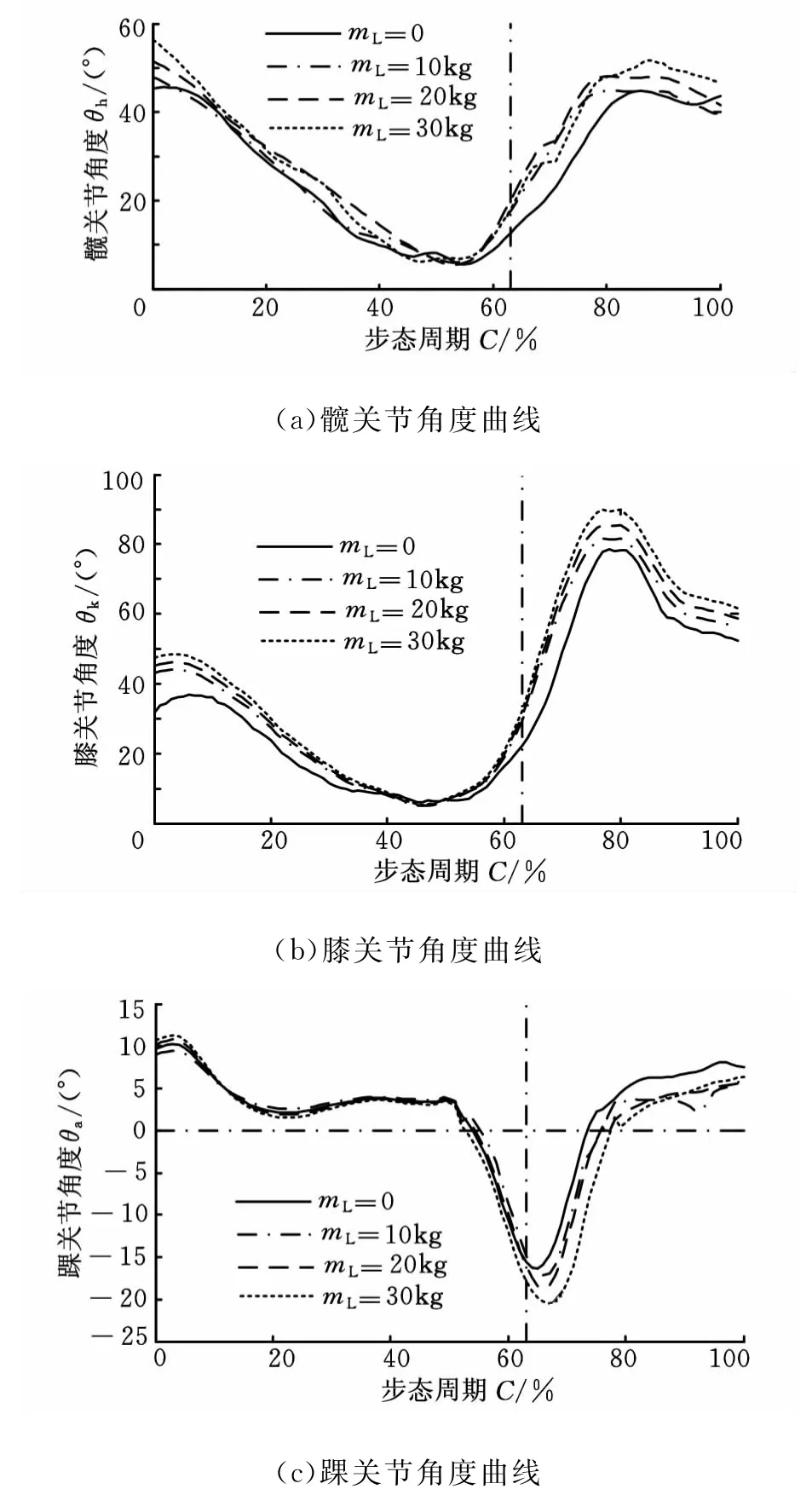
图4 上楼梯过程中下肢各关节角度曲线
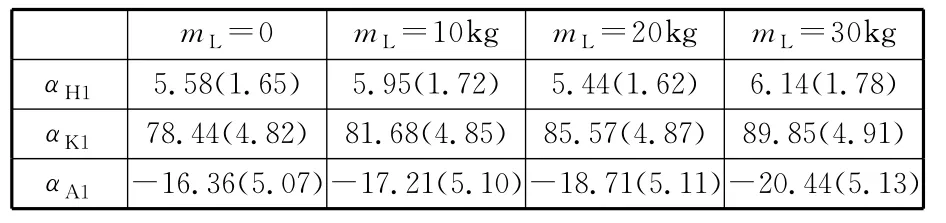
表1 不同负重(mL)楼梯行走中关键点的关节角度值(平均值及偏差)
图4中横坐标表示步态周期,定义从脚跟着地开始到下次的脚跟着地为一个步态周期。一个步态周期内包括支撑相和摆动相,由图4可得出,在上楼梯过程中,支撑相约为64%。图4中,纵坐标为关节角度值,各关节角度的定义如图5所示。
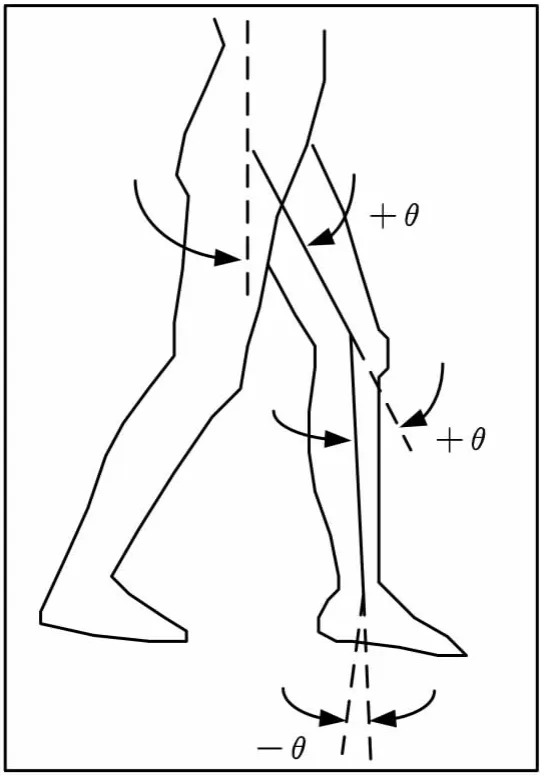
图5 关节角度定义说明
由图4及表1可知,上楼梯过程中,下肢各关节运动如下:当脚跟着地后,髋关节和膝关节开始伸展运动,踝关节进行跖屈,在下肢从脚跟着地到支撑中相的运动过程中,髋关节、膝关节一直伸展,而踝关节在最后有轻微的背屈运动;当从支撑中期到脚尖离地过程中,髋关节和膝关节持续伸展,踝关节背屈至脚尖离地,脚部放松伸直;从脚尖离地到下次脚跟着地过程中,髋关节、膝关节弯曲,踝关节跖屈,做腿部的抬升动作,直至迈上楼梯。
负重对髋关节、膝关节的最大伸展角影响不大,但髋关节及膝关节的最大弯曲角均随负重的增加而增大,同时踝关节的最大背屈角也随着负重的增加而增大。
3.2 楼梯行走过程中下肢各关节的力矩及功率变化
不同负重条件下,上楼梯过程中,下肢各关节力矩及功率的变化曲线分别如图6、图7所示。力矩曲线及功率曲线中关键点的数值如表2所示。
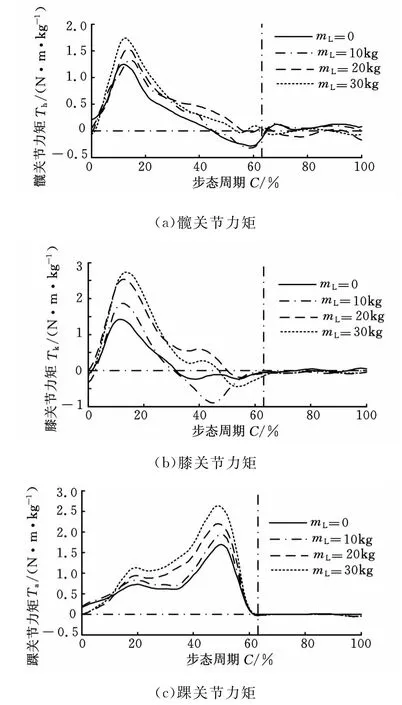
图6 上楼梯过程中下肢各关节力矩曲线(图中纵轴为关节力矩相对测试者身体质量进行规格化的结果)
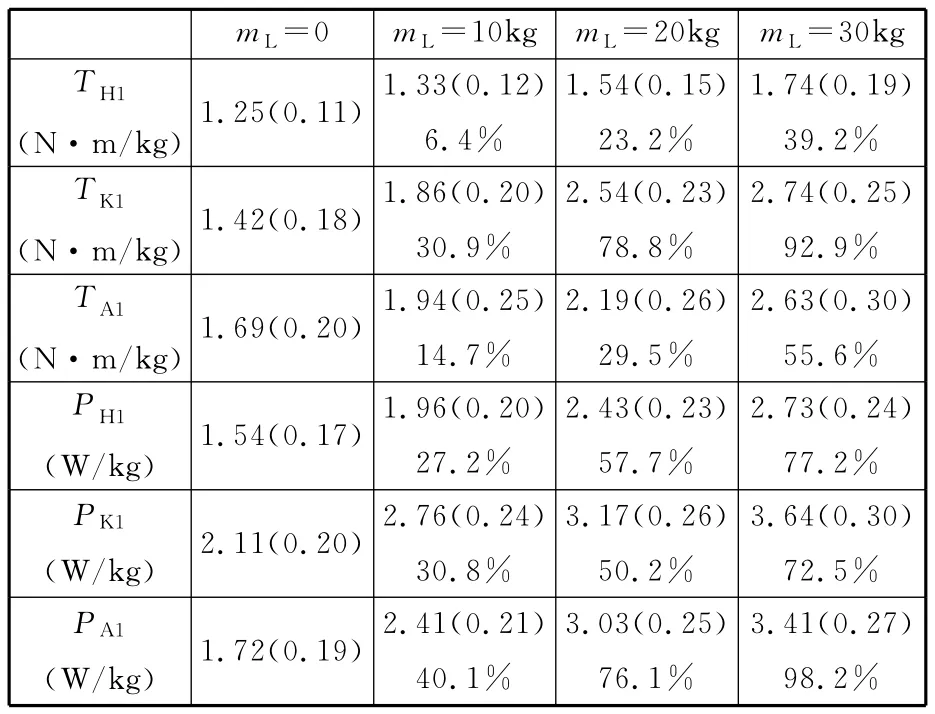
表2 不同负重楼梯行走中关键点的关节力矩及功率的数值(平均值及偏差)
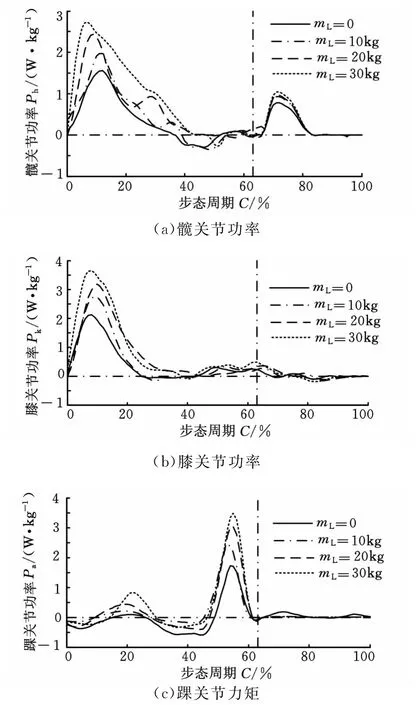
图7 上楼梯过程中下肢各关节力矩曲线(图中纵轴为关节力矩相对测试者身体质量进行规格化的结果)
由图6、图7及表2可知,当脚跟着地后,髋关节、膝关节伸展,带动整个身体向前向上运动,故两关节需输出力矩及功率,以促成此种运动。在脚跟着地到支撑中相的运动过程中,踝关节的力矩及功率输出不大,从支撑中相到脚尖离地的过程中,踝关节的输出力矩及功率较大,用以完成脚尖蹬离楼梯迈向更上一层楼梯的运动。
在上楼梯过程中,下肢各关节力矩均随负重的增加而增大,同时下肢各关节功率也均随负重的增加而增大。由表2中的力矩、功率增大幅度值可看出,在楼梯行走过程中,膝关节的关节力矩随着负重的增加,其增大幅度较明显;而踝关节的关节功率随着负重的增加,其增大幅度较明显。
4 楼梯行走对助力机器人设计的启示
(1)楼梯行走生物力学结果分析。在上楼梯运动过程中,下肢各关节运动在步态周期的不同运动相内,变化有所不同。从脚跟着地到支撑中相的运动过程中,髋关节、膝关节角度伸展,带动身体向前向上运动,相应的两关节输出力矩及力矩随负重增加而增大,以促成此运动,而踝关节做跖屈运动,关节力矩也逐渐增大;从支撑中相到脚尖离地过程中,输出髋关节、膝关节角度伸展,踝关节做背屈运动,且踝关节输出功率逐渐增大,完成脚尖蹬离楼梯的运动;从脚尖离地到再次的脚跟着地的运动过程中,髋关节、膝关节弯曲,踝关节跖屈,做腿部的抬升动作,直至迈上楼梯,在此运动过程中,各关节在髋关节的带动下,做被动摆动,膝关节及踝关节的输出功率较小。
由楼梯行走的生物力学变化情况可知,楼梯行走与平地行走有很大的区别,与平地行走相比[20],楼梯行走过程中,下肢各关节角度的变化范围较大,表明楼梯行走要比平地行走输出较大的关节力矩及功率。与平地行走相比,楼梯行走过程中在一个步态周期内下肢各关节功率均为正值,这说明人体各关节在楼梯行走中主要起主动作用,故在进行助力机器人设计时,机器人各关节应采取主动驱动方式或可采用储能装置与主动驱动相结合的方式。
(2)负重对楼梯行走的影响。负重对楼梯行走的影响较大,尤其是下肢三个关节的输出力矩及功率,均随负重的增加而增大。从脚跟着地到支撑中期,髋关节、膝关节的力矩及功率随负重增加而增大的幅度较明显,在这个过程中,踝关节的力矩及功率变化不大,而在从支撑中期到脚尖蹬离地面的过程中,踝关节的力矩及功率随负重增加而增大的幅度较明显。由负重增加对下肢各关节力矩及功率的影响,可类推出助力机器人在负重行走中不同的步态阶段,其各个关节的运动变化特征。
楼梯负重行走与平地负重行走相比,随着负重的增加,下肢各关节的力矩及功率增大幅度较大,这也是由于楼梯行走中关节运动范围增大所致。进行不同负重条件下的楼梯行走生物力学的研究,获得下肢各关节的运动学及动力学输出结果,得出负重上楼梯行走过程中,人体下肢主要关节的输出力矩、功率的峰值及相应的变化趋势,由此可以为下肢助力机器人结构设计、驱动方式的选取、控制策略的设计提供重要的参考依据。
[1]Andriacchi T P,Anderson G B,Fermier R W,et al.A Study of Lower-limb Mechanics during Stair Climbing[J].The Journal of Bone and Joint Surgery,1980,62(5):749-757.
[2]Kowalk D L,Duncan J A,Vaughan C L.Aductionadduction Moments at the Knee during Stair Ascent and Descent[J].Journal of Biomechanics,1996,29(3):383-388.
[3]Riener R,Rabuffetti M,Frigo C.Stair Ascent and Descent at Different Inclinations[J].Gait and Posture,2002,15(1):32-44.
[4]Protopapadaki A,Drechsler W I,Cramp M C,et al.Hip,Knee,Ankle Kinematics and Kinetics during Stair Ascent and Descent in Healthy Young Individuals[J].Clinical Biomechanics,2007,22(2):203-210.
[5]Reid S M,Novak A C,Brouwer B,et al.Relationship Between Stair Ambulation with and without a Handrail and Centre of Pressure Velocities during Stair Ascent and Descent[J].Gait and Posture,2011,34(4):529-532.
[6]Bergmann G,Graichen F,Rohlmann A.Is Staircase Walking a Risk for the Fixation of Hip Implants[J].Journal of Biomechanics,1995,28(5):535-553.
[7]Kowalk D L,Duncan J A,McCue F C,et al.Anterior Cruciate Ligament Reconstruction and Joint Dynamics during Stair Climbing[J].Mediccal Science of Sports and Exercise,1997,29(11):1406-1413.
[8]Bolgla L A,Malone T R,Umberger B R,et al.Hip Strength and Hip and Knee Kinematics during Stair Descent in Females with and without Patellofemoral Pain Syndrome[J].Journal of Orthopaedic&Sports Physical Therapy,2008,38(1):12-18.
[9]Au S,Berniker M,Herr H.Powered Ankle-foot Prosthesis to Assist Level-ground and Stair-descent Gaits[J].Neural Networks,2008,21(4):654-666.
[10]吴剑,李建设.人体行走时步态的生物力学研究进展[J].中国运动医学杂志,2002,21(3):305-307.Wu Jian,Li Jianshe.The Research Progress of Human Walking Gait Biomechanics[J].China Journal Sports Medicine,2002,21(3):305-307.
[11]魏高峰,白雪岭,张希安,等.建立基于广义Hamilton及Lie群理论的人体骨肌系统动力学方程[J].医用生物力学,2009,24(4):276-280.Wei Gaofeng,Bai Xueling,Zhang Xian,et al.Biodynamic Model of Human Musculoskeletal System Based on the General Hamilton and Lie Group Theory[J].China Journal Sports Medicine,2009,24(4):276-280.
[12]励建安,孟殿怀.步态分析的临床应用[J].中华物理医学与康复杂志,2006,28(7):500-502.Li Jian’an,Meng Dianhuai.The Clinical Application of Gait Analysis[J].Chinese Journal of Physical Medicine and Rehabilitation,2006,28(7):500-502.
[13]郝卫亚.人体运动的生物力学建模与计算机仿真进展[J].医用生物力学,2011,26(2):97-103.Hao Weiya.Advances in Biomechanical Modeling and Computer Simulation of Human Movement[J].China Journal Sports Medicine,2011,26(2):97-103.
[14]杨建坤,武明,季林红,等.人体背部负重对坡道行走步态的影响[J].清华大学学报(自然科学版),2005,45(5):651-653.Yang Jiankun,Wu Ming,Ji Linhong,et al.Effects of Carried Loads on Human Gait during Walking on Aninclined Surface[J].J.Tsinghua Univ.(Sci.& Tech.),2005,45(5):651-653.
[15]唐刚,魏高峰,周海,等.测量并分析上楼梯过程中下肢关节角变化[J].医用生物力学,2011,26(5):460-464.Tang Gang,Wei Gaofeng,Zhou Hai,et al.Measurement and Analysis of the Joint Angle in Lower Limb during Stair Ascent[J].China Journal Sports Medicine,2011,26(5):460-464.
[16]刘建华,丸山仁司,胜平纯司.上下台阶方法的生物力学研究[J].中国康复理论与实践,2003,9(10):604-605.Liu Jianhua,Mar Uwa Ma Hitoshi,Kats UhiraJunshi.Biomechanics Analysis of Ascending and Descending Stairs[J].China J.Rehabil Theory Practice,2003,9(10):604-605.
[17]张瑞红,金德闻,张济川,等.不同路况下正常步态特征研究[J].清华大学学报(自然科学版)2000,40(8):77-80.Zhang Ruihong,Jin Dewen,Zhang Jichuan,et al.Normal Gait Patterns on Different Terrain[J].J.Tsinghua Univ.(Sci.& Tech.),2000,40(8):77-80.
[18]Han Yali,Wang Xingsong,Fu Chunqian,et al.The Study on Human Walking Gait Analysis System for the Design of Walking Power-assisted Robot[C]//IEEE ICMA 2009.Changchun,2009:3607-3612.
[19]Vaughan C L,Davis B L,O’Connor J C.Dynamics of Human Gait[M].2nd ed.Champaign:Human Kinetics Publishers,1999.
[20]Han Yali,Wang Xingsong.The Biomechanical Study of Lower Limb during Human Walking[J].Sci.China Tech.Sci.,2011,54(4):983-991.
