基于横摆角速度负反馈的电传动履带车辆原地转向控制策略
2013-09-07陈泽宇赵广耀佟尚锷
陈泽宇 赵广耀 翟 丽 佟尚锷
1.东北大学,沈阳,110819 2.北京理工大学,北京,100081
0 引言
履带车辆是地面车辆的主要形式之一,与轮式车辆相比具有更优越的通过性,尤其是在非结构化道路上仍然能保持高度的机动性,因此广泛用于农业、矿业和建筑业以及军用车辆领域[1]。履带车辆的转向方式与轮式车辆有较大区别:由于不具备前轮转向功能,履带车辆必须通过控制两侧履带产生不同的作用力来使车辆获得横摆力矩,在横摆力矩作用下车辆克服地面侧向阻力发生转向,因此转向时功率需求较大,但是有利于实现较小的转向半径[2],尤其当两侧履带的作用力等值反向时,还可以实现零半径转向,即原地中心转向,使车辆可以在一些特定的狭窄空间里完成转向任务,这也是履带车辆的重要技术优势之一。
近年来随着电力电子技术、计算机控制和通信技术等的迅速发展,电传动系统在履带车辆上的应用已日趋成熟[3-6],较传统履带车辆而言,电传动履带车辆可以通过综合控制器灵活独立地快速调节两侧电机力矩,因此更有利于实现良好原地转向的控制效果。本文针对电传动履带车辆原地转向过程中双侧电机力矩控制算法进行研究,提出一种基于横摆角速度负反馈的原地转向控制策略,并进行了仿真验证。
1 履带车辆原地转向动力学模型
为了建立正确有效的原地转向控制策略,首先对履带车辆原地转向过程的动力学特性进行分析,建立履带车辆原地转向动力学模型,如图1所示。原地转向过程中,两侧履带产生方向相反的作用力,构成了履带车辆原地转向所需的横摆力矩,在横摆力矩作用下,履带克服地面侧向力被拖滑。
图1中,Fμ1与Fμ2分别为地面对两侧履带的反作用力,u1与u2分别为单侧履带纵向速度,Fsi(i=1,2,3,4)为履带与地面之间的侧向力,L为履带接地段的长度,B 为左右两侧履带的中心距。
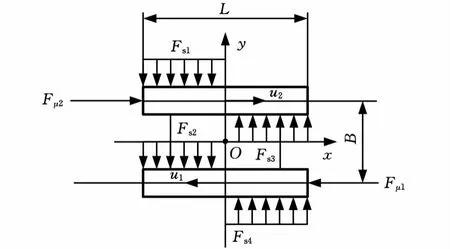
图1 履带车辆原地中心转向受力模型
根据动力学模型可得履带车辆原地转向时的受力方程:

式中,ψ为车辆横摆角速度;Iz为履带车辆在横摆方向上的转动惯量。
履带车辆原地转向横摆力矩来自于地面对两侧履带的反作用力Fμ1与Fμ2。对单侧履带进行分析,其受力模型如图2所示。
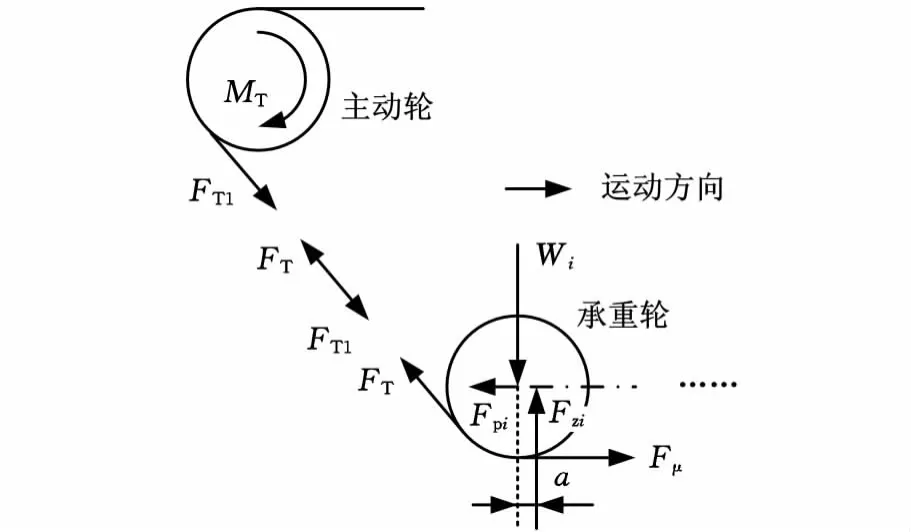
图2 履带车辆原地中心转向受力模型
根据主动轮与承重轮的力矩平衡关系,可得单侧履带动力学方程:
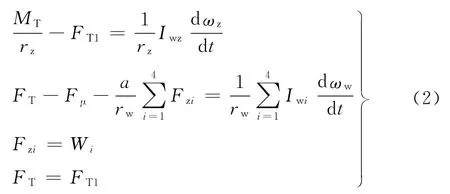
式中,MT为作用在主动轮上的转矩;FT1与FT为履带张紧力;Wi与Fzi分别为单个承重轮垂直载荷和地面支撑力;rw与rz分别为承重轮和主动轮半径;Iwz与Iwi分别为主动轮和单个承重轮转动惯量;ωw与ωz分别为承重轮和主动轮转速;a为地面支撑力与垂直载荷偏离距离。
电传动履带车辆两侧履带一般是由布置在车体两侧的两套电机系统来独立驱动的,根据式(2)可得单侧履带所受地面反作用力为

令
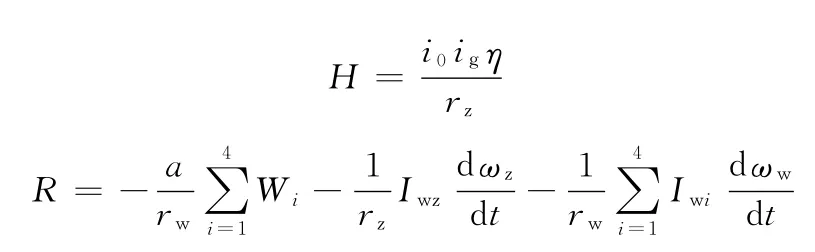
式中,i0为主减速传动比;ig为变速器传动比;Tm为电机力矩;η为传动效率。
由式(3)可得单侧履带所受地面反作用力与电机力矩关系:

2 电传动履带车辆系统结构
图3所示为电传动履带车辆系统结构,综合控制器计算双侧电机目标力矩值并与两侧电机控制器通过CAN总线通信,电机控制器自主地对电机进行力矩调节,使电机实际输出力矩与综合控制器发出的目标力矩值一致。
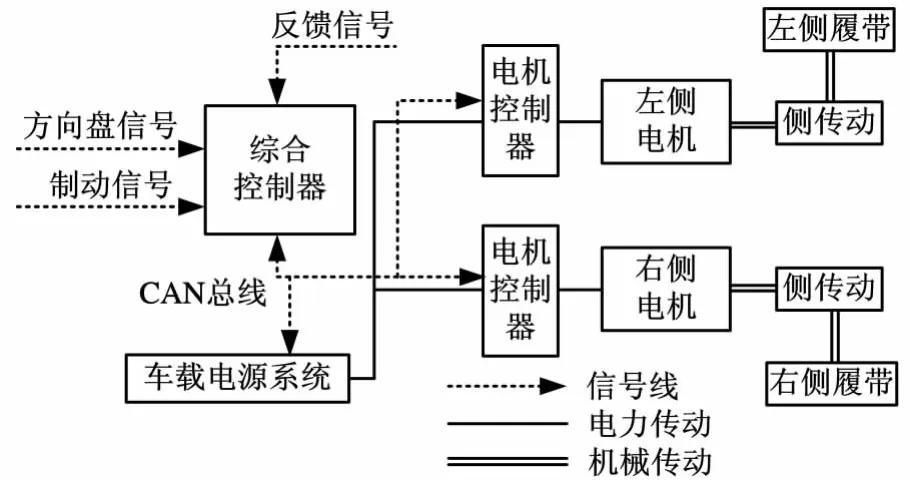
图3 双侧电传动履带车辆驱动系统结构
两侧履带主动轮上的驱动力矩由电机力矩决定,根据电机工作特性可以将其力矩动态响应等效为一阶延迟环节,驱动力矩与电机目标力矩间的关系为

式中,ωm为电机转速;Tmax(ωm)为当前转速下的电机最大力矩;τ为时间常数。
3 原地转向控制算法研究
履带车辆原地转向的理想控制效果可以概括为如下三点:①当驾驶员给定一个固定的方向盘转角时,履带车辆能够以固定横摆角速度进行匀速原地转向;②原地转向的速度可以由方向盘精确控制;③转向时的动态响应速度较快。
3.1 控制策略
综合控制器根据驾驶员方向盘转角信号来控制履带车辆原地转向的速度,控制器的输入为方向盘转角信号,输出为双侧电机目标力矩。为了使履带转向速度符合驾驶员的操作意图,必须将驾驶员方向盘转角信号引入控制算法中。因此首先定义驾驶员方向盘转角信号:
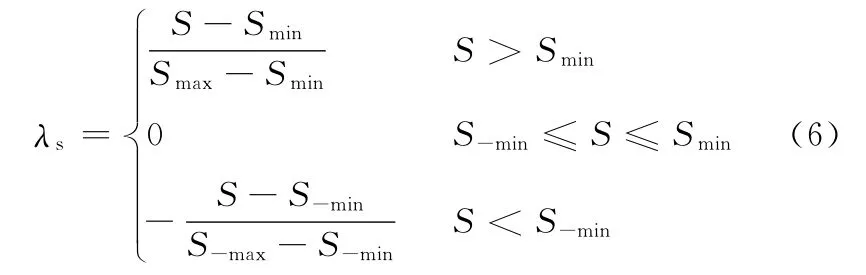
式中,λs为方向盘输入信号;S为方向盘转角;S-max与Smax分别为方向盘左右两侧的最大转角;S-min与Smin分别为方向盘左右两侧自由行程转角。
在履带作用力控制算法中引入状态变量的负反馈以确保原地转向过程中实现稳定可控的转向速度,则单侧履带作用力为

式中,F0为根据电机初始力矩得到的履带作用力;Ks为负反馈增益。
将电机最大力矩设置为电机初始力矩F0,这样可以充分利用电机力矩来提高动态响应能力,使车辆横摆角速度快速跟随方向盘阶跃输入:

为了使转向速度可以良好地受控于驾驶员,将λs引入负反馈增益,通过方向盘转角来改变负反馈增益的大小,从而使稳态横摆角速度随驾驶员输入而相应变化,图4为控制策略流程图。
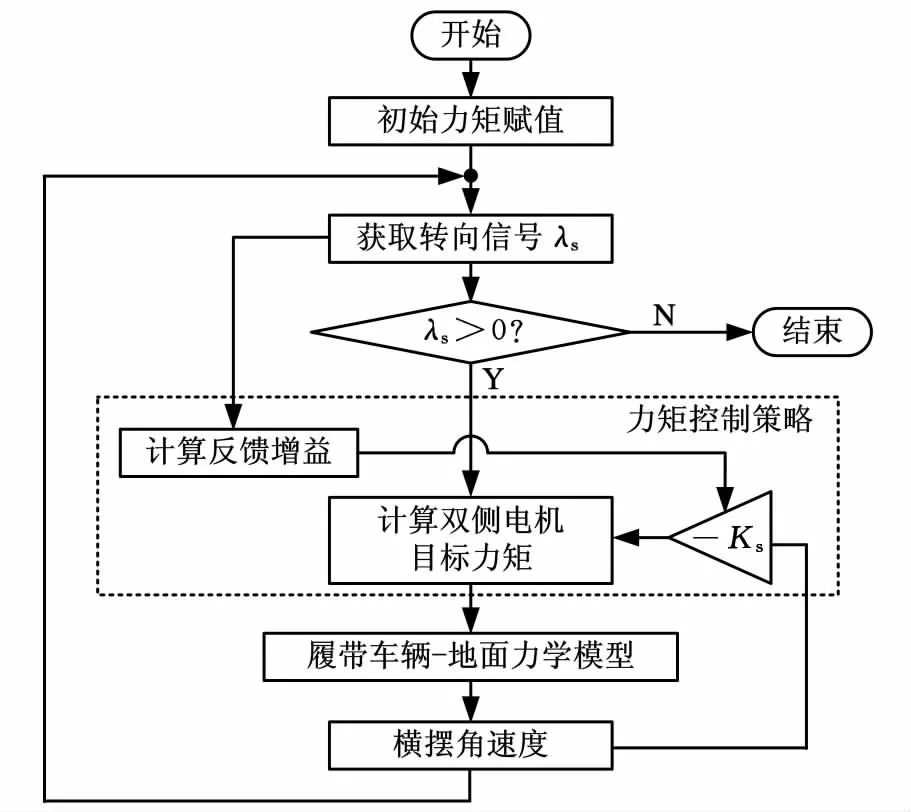
图4 原地转向控制策略流程图
将λs引入负反馈增益后单侧履带作用力控制的负反馈增益系数为

其中,f(λs)为λs的单调减函数。
在原地转向过程中,双侧电机目标力矩大小相等方向相反,结合式(6)~式(9)可得电机目标力矩为

λs=0时分为两种状态:一是车辆静止未进行转向,即ψ=0;二是驾驶员希望车辆停止转向,即ψ≠0,此时控制策略会自动产生一个反向的制动力矩,帮助履带车辆快速停止原地转向,即

式中,Ms为双侧电机产生的横摆制动力矩。
3.2 控制参数设计
反馈增益系数是原地转向控制策略设计中的重要参数,f(λs)为λs的单调递减函数,可以用一次函数关系表示为

式中,k、M 为负反馈函数中的待定系数。
横摆角速度ψ与电机转速nm之间存在如下关系:

式中,it为电机到履带的侧传动比。
因此可得输出电机输出力矩表达式为

结合式(10)、式(14)可得到稳态横摆角速度的上限与下限:
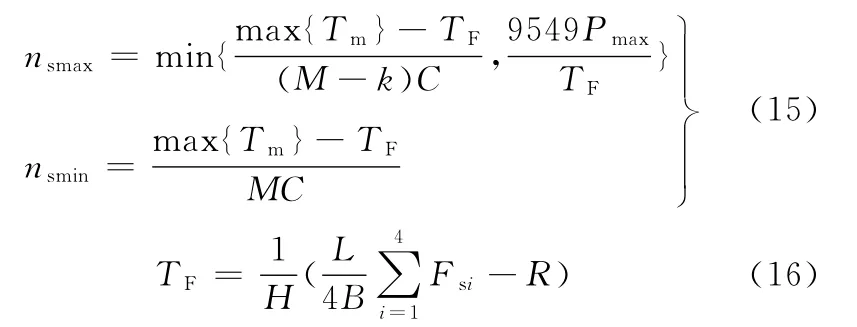
式中,Pmax为电机峰值功率;TF为克服转向阻力所需要的电机驱动力矩。
由上述分析可以得到结论:反馈增益函数中的系数M决定了原地转向时的最低稳定横摆角速度,而M与k之差决定了最高横摆角速度。
4 仿真结果
为了验证上述电传动履带车辆原地转向控制策略的正确性与有效性,通过MATLAB/Simulink在不同的驾驶员方向盘输入的情况下对履带车辆进行原地转向仿真研究,取k=3600,M=4000,其他主要仿真参数包括:整车质量m=40t,地面阻力系数f=0.08,双侧电机的峰值力矩Tmax=2200N·m,侧传动比i=13.2,履带接地长度L=4.2m,履带中心距B=2.8m。
图5所示为不同方向盘转角角阶跃输入情况下的电机力矩和横摆角速度仿真结果,可以看出:将方向盘转角信号引入到负反馈增益函数中,使得力矩调节轨迹随方向盘转角的变化而相应改变;横摆角速度以很快的响应速度迅速达到稳态值,且稳态横摆角速度随方向盘转角的改变而相应地变化,说明所提出的控制策略对于给定的驾驶员方向盘转角可以实现速度稳定的原地转向,且转向速度可以被驾驶员方向盘良好地控制。
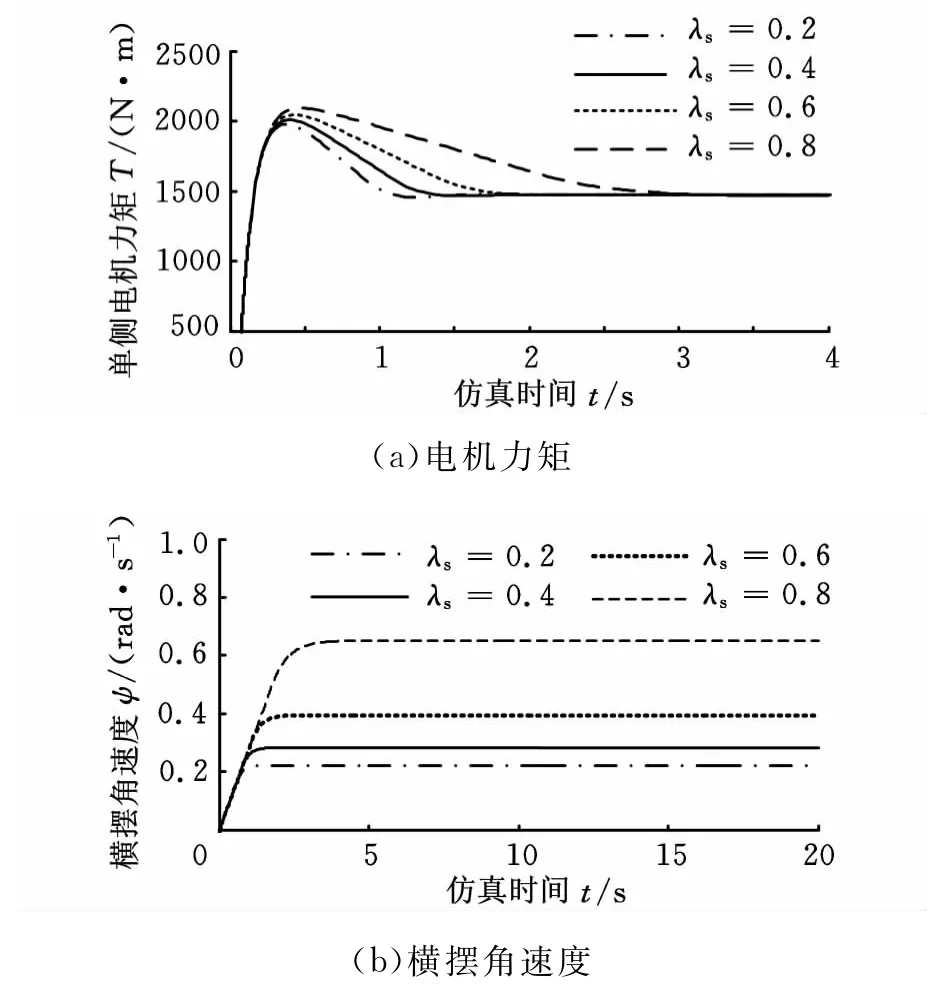
图5 方向盘转角阶跃输入仿真结果
方向盘转角信号连续变化时的仿真结果如图6、图7所示。由图6、图7可知,在方向盘转角动态变化的过程中,控制算法也能使驾驶员对原地转向速度有很好的控制效果。
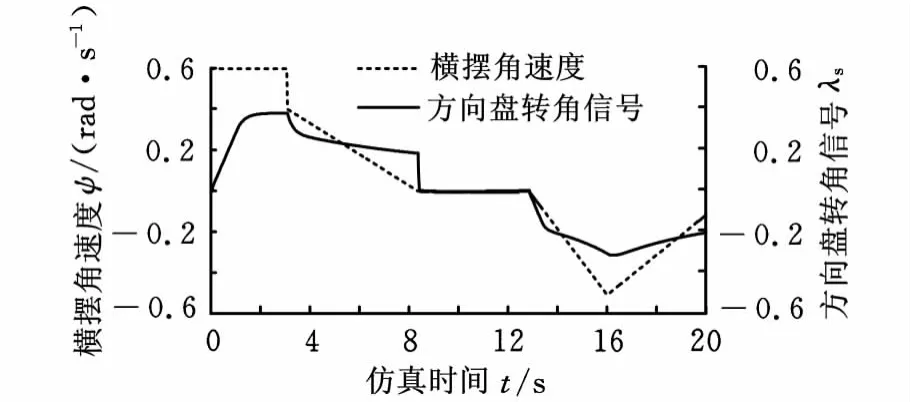
图6 方向盘转角连续变化时的横摆角速度仿真结果
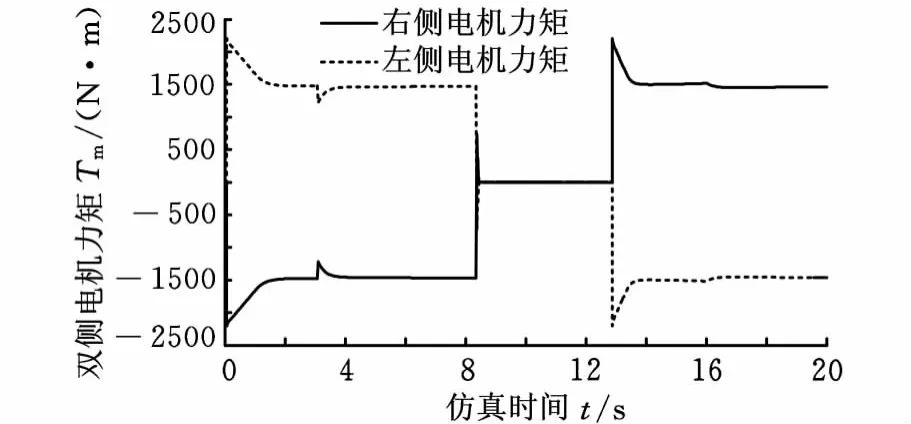
图7 双侧电机力矩仿真结果
为了观察并验证反馈增益系数M 与k对转向速度控制效果的影响,改变反馈增益系数的值,重复上述仿真过程,结果如图8所示,可以看出,当M=4500时最低转向速度相等;而当M-k=500时最高转向速度相等。
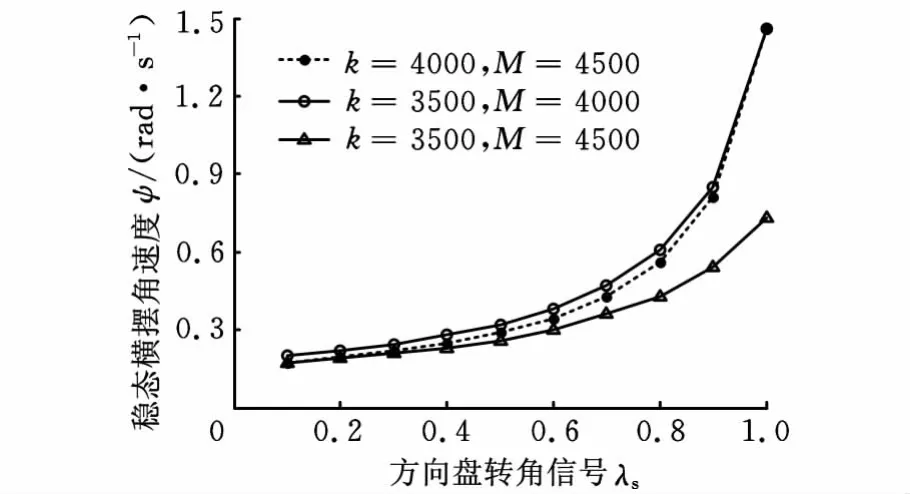
图8 反馈增益系数对转向速度影响结果
上述仿真结果与理论分析结论一致,在电机参数一定的情况下,最低稳定横摆角速度由M 的取值决定,而与k值无关;而最高稳定横摆角速度则只与M-k有关,而与M、k本身的取值无关。在设计控制器时可以此为理论参考设计指标所要求的转向速度来进行M 与k的计算。
5 结论
(1)将方向盘转角信号引入负反馈增益可以有效地实现驾驶员对原地转向速度的控制。
(2)本文提出的控制策略可以实现良好的原地转向控制效果,对于任意驾驶员方向盘角阶跃输入均可以以很快的响应速度迅速达到一个稳态横摆角速度;且在方向盘转角动态变化的过程中,控制算法也能使驾驶员对原地转向横摆角速度有很好的控制效果。
(3)反馈增益系数的设计对控制效果影响很大,M 决定了最低转向速度;M-k决定了最高转向速度。
[1]颜南明,马晓军,臧克茂.履带装甲车辆电传动技术初探[J].兵工学报,2004,25(5):619-623.Yan Nanming,Ma Xiaojun,Zang Kemao.Electric Drive Systems in Armored Tracklayer Vehicles[J].Acta Armamentarii,2004,25(5):619-623.
[2]陈泽宇,张承宁,李军求,等.双侧电传动履带车辆小半径转向控制策略[J].中国机械工程,2010,21(13):1632-1637.Chen Zeyu,Zhang Chengning,Li Junqiu,et al.Dual Electric Tracked Vehicle Small-radius Turning Control Strategy[J].China Mechanical Engineering,2010,21(13):1632-1637.
[3]Rahman A,Yahya A,Zohadie M,et al.Simulated Steerability of a Segmented Rubber Tracked Vehicle during Turning on Sepang Peat Terrain in Malaysia[J].International Journal of Heavy Vehicle Systems,2005,12(2):139-168.
[4]Park Dong,Lim Sung-Kyun,Kwak Yoon Keun.Design and Optimisation of Variable Geometry Single-tracked Vehicle for Climbing Stairs[J].International Journal of Vehicle Design,2007,43(1/4):221-36.
[5]孙逢春,陈树勇,郭汾.基于转矩控制策略的电传动履带车辆驱动特性研究[J].兵工学报,2007,28(2):129-133.Sun Fengchun,Chen Shuyong,Guo Fen.Research on Driving Performances of Electric Transmission Tracked Vehicles Based on Torque Control Strategy[J].Acta Armamentarii,2007,28(2):129-133.
[6]Tran D T,O’Brien J,Mruo T.An Optimal Method for the Design of a Robotic Tracked Vehicle to Operate Over Fresh Concrete under Steering Motion[J].Journal of Terramechanics,2002,39(1):1-22.
