振动条件下图像显示性能分析系统关键技术
2013-09-07赵歆波陈敏华
侯 阳 赵歆波 马 钟 陈敏华
1.西北工业大学,西安,710072 2.中国人民解放军95007部队,广州,510000
0 引言
在工业生产中,许多图像显示设备工作于振动条件下,而对于此类设备显示性能的测试主要依靠专业测试人员的主观评判,无法提供定性的测试数据。目前对于振动条件下的测量与分析,最常用的是接触式传感器测量方法,此类测量方法对测试对象的影响较大,其应用也受到极大限制。为此,非接触式的光学方法振动测试的研究受到不少学者的青睐,比如Halliwell等[1]提出的激光干涉法,Wong等[2]提出的数字散斑法,都克服了接触式测量的缺点。近年来随着计算机视觉技术的发展,人们开始研究利用计算机视觉原理进行振动的测量与分析,如Olaszek[3]采用实时跟踪标志点的图像对桥梁特性进行的研究,白顺科等[4]利用被测物体在静止状态和振动状态分别拍摄的两幅图像来确定物体振幅的时间平均成像方法都是这方面的例子。上述方法因受频率和模型精度的影响,存在着各自的局限性。为克服振动测量的上述局限性,方便解决客观和高精度的振动测量问题,本文提出了一种基于计算机视觉技术在振动环境下对图像显示设备显示性能进行客观分析的方法。该方法通过视频运动补偿操作消除摄像机轻微振动对目标图像检测精度的影响,利用亚像素提取技术实现对目标图像的高精度检测[5],从而实现振动环境下图像显示设备显示性能的客观分析。
1 摄像机移动测量支架设计
摄像机移动测量支架用于固定摄像机并满足摄像机高度及俯仰角的调节技术要求。摄像机在采集图像过程中,受到振动影响,采集的图像往往是模糊的。为了最大程度地消除振动对摄像机拍摄的影响,还需对摄像机移动测量支架进行减振设计。
分析显示,由振动台振动导致的摄像机运动,主要分为角位移和平行位移,其中角位移是造成图像退化的主要原因,为此,采用了6自由度被动减振方案[6](图1),本方案的减振理论是基于改变系统固有频率,使系统固有频率远离工作频率,采用弹簧阻尼装置吸收系统多维振动能量,以取得减振线位移小于0.1mm、角位移小于0.3′的效果。实验表明本装置可以消除大部分振动对摄像机的影响,可保证采集图像的质量。
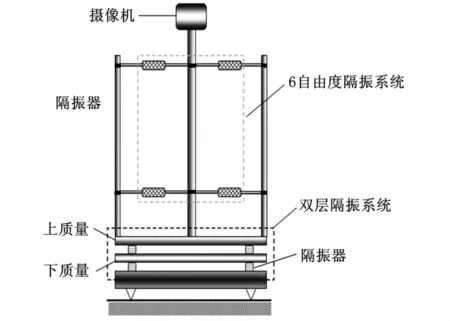
图1 摄像机移动测量支架
2 视频运动补偿
摄像机受振动的影响,造成摄像机与拍摄物体之间的相对运动,导致相邻帧的内容发生偏移,而这种偏移会影响测量的精度。为了消除偏移对测量精度的影响,除了在硬件系统中采用摄像机移动测量支架减振外,还需对拍摄到的图像进行运动补偿,找出不同帧之间的相对位移关系,并对偏移进行补偿[7]。
2.1 摄像机运动建模
要进行视频运动补偿,首先要建立摄像机运动模型[8]。按照运动学原理,背景同摄像机之间的相对运动可以看作是在背景静止条件下成像平面的运动。三维空间中一点Q在齐次坐标系平面上的投影,可表示为如下形式:
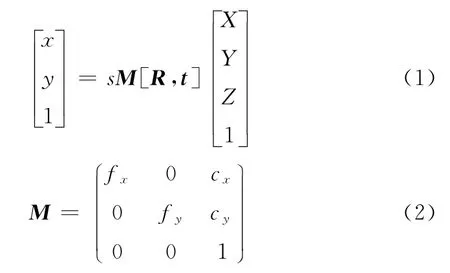
式中,s为比例缩放因子;R、t分别为从世界坐标系到摄像机坐标系的旋转矩阵和平移向量,是摄像机的外参数;M为摄像机的内参数矩阵;fx、fy分别为摄像机在x、y方向上的焦距;cx、cy为图像中心(光轴与图像平面的交点)坐标。
通过设定世界坐标系,将背景平面定义在Z=0处,这样就将旋转矩阵R分解成3个3×1向量(R=(r1,r2,r3)),因不再需要其中的一个列向量,故式(1)可以表示为
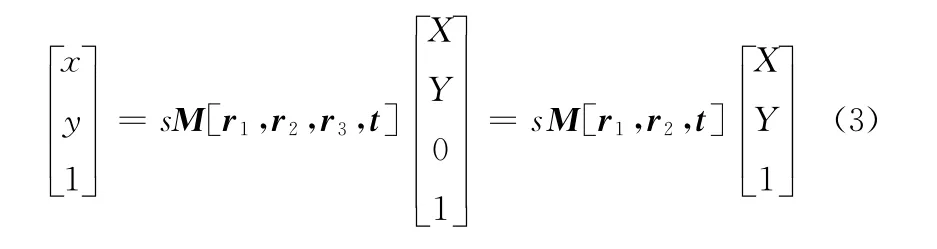
三维空间中一点到成像平面的单应性矩阵为H=sM[r1,r2,t],摄像机同被拍摄物体之间的相对运动造成图像背景变形可用8个参数的透视模型来描述。在传统的背景配准方法中,可通过带入4个背景对应特征点对,建立包含8个不相关方程的方程组加以求解得到。
2.2 SURF特征点提取与匹配
为了求解摄像机运动参数,需要获得不同帧之间的特征点对。本文采用基于SURF(speed up robust features)[9]的算法来获得不同帧之间的特征点对。首先通过SURF算法分别求出参考图像与待补偿图像特征点,采用KDTREE[10]方法依次寻找两幅图像中最相似的两个对应点组成特征点对,完成两幅图像特征点的粗匹配;其次采用RANSAC算法剔除误匹配以获得精确的匹配点对;再次使用最小二乘法求解透视模型参数;最后根据求得的透视模型对待补偿图像进行透视变换,即可完成一个视频帧的运动补偿。视频运动补偿算法流程如图2所示。
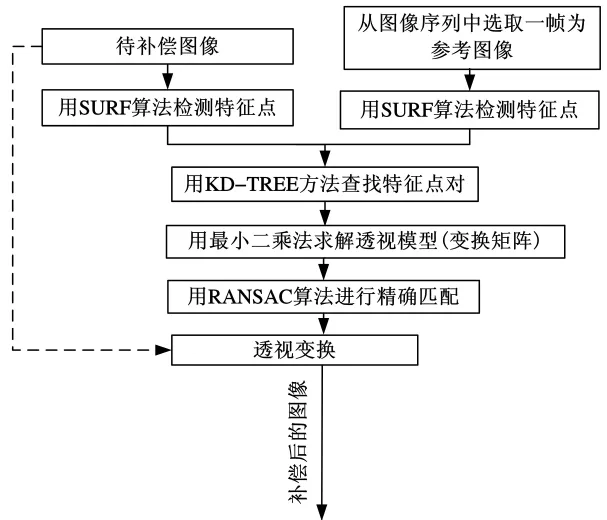
图2 视频运动补偿流程
3 线检测与定位
在完成摄像机运动补偿后,使所有图像处于同一坐标系下,便可对目标图像(图3)的十字交叉线进行检测与定位。通过分析不同帧之间的十字交叉线位置变化,得出显示设备在振动环境下显示性能的检测结果,实现振动环境下显示设备显示性能的自动检测。

图3 目标图像
3.1 线点检测
根据文献[5]中的亚像素线检测方法,要检测亚像素精度线段,首先要检测组成线段的亚像素线点。线点位于垂直线方向上一阶方向导数为零、二阶方向导数取得最大绝对值处。二阶方向导数取得最大绝对值的方向可以通过计算Hessian矩阵的特征值和特征向量得到,Hessian矩阵定义如下:

若把真实的图像看作是二维函数I(x,y),则gxx,σ(x,y)、gyy,σ(x,y)、gxy,σ(x,y)分 别 是二维高斯函数。对应于最大特征值的特征向量即为垂直线的方向,若用单位向量(vx,vy)进行表示,且l表示沿着这个方向的线点长度,则一个线点的表达式为

3.2 由线点找出直线
先利用上述方法获得亚像素线点位置,再采用霍夫变换在线点中寻找直线[11-12]。本文采用累计概率霍夫变换(PPHT)[13]的方法在线点中寻找直线,因PPHT是标准霍夫变换的一个变种,故用其计算单独线段的方向以及范围时,不需要将累加器平面内的所有可能点累加,只需累加其中的一部分。如果峰值足够高,很快就能找到它,从而节约大量的时间。
4 实验结果及分析
为了检测系统在振动环境下显示设备的显示性能,设计了以下实验:在距离振动台50cm处使用高速摄像机采集图像,摄像机被放置在摄像机移动测量支架上,设置的摄像机采集频率为50Hz,采集图像的分辨率为2352像素×1726像素;在振动台静止的情况下采集5s视频,记为视频1;然后将图像在水平方向偏移1′的角度,再次采集5s视频;为了模拟振动环境,将上述视频中的图像乘以透视变换矩阵生成一个新的视频,记为视频2。
本文的检测方法是将设定图像中的某一条线段作为参考线段,通过线检测算法检测出视频所有帧中参考线段的位置坐标,将检测出来的参考线段位置坐标与此线段的原始坐标进行比较,根据线的偏移大小来评价显示设备显示性能的好坏。如果线偏移在3′以内,我们认为显示设备是合格的,否则为不合格;如果在1′以内我们认为此显示设备是优秀的。图4、图5所示分别是对视频进行线检测的结果,其中横坐标为视频的帧数,纵坐标为视频帧中参考线段检测出的位置坐标与参考线段原始位置坐标的偏差,偏差的计算式为

式中,H为摄像机到测试目标所在平面的距离;α为偏差视角;L为被拍摄物体的距离。

图4 视频1(静止条件下)检测结果
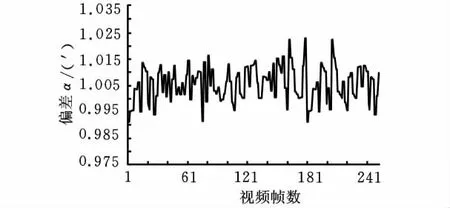
图5 视频2(振动条件下)检测结果
由于视频1是在振动台静止的情况下采集的,所以不需要对视频1进行运动补偿的操作,而是直接利用线检测方法进行检测。由图4可以看出,检测的结果基本在0.02′的偏差范围之内。部分帧的检测结果数据如表1所示,表中的每一行表示视频帧中检测出的参考线段中点坐标,以及与参考线段原始位置的偏差。从表1检测结果可以看出,线检测的精度完全满足本文亚像素精度的检测要求。
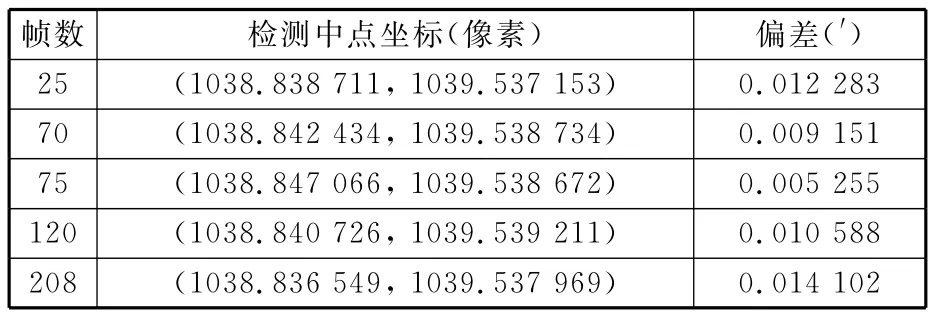
表1 视频1中不同帧的参考线段检测结果,参考线段原始位置中点坐标为(1038.853 313,1039.538 501)
表2所示为视频2中不同帧的参考线段检测结果,由于视频2是在模拟振动台振动的情况下采集的,故首先利用本文提出的视频运动补偿算法对视频2进行运动补偿操作,以避免摄像机运动所带来的误差,然后再对补偿后的视频进行线检测分析。由图5可以看出,检测结果偏差在1′左右,误差在0.02′之内,说明显示设备符合要求。

表2 视频2中不同帧的参考线段检测结果,参考线段原始位置中点坐标为(1038.853 313,1039.538 501)
为了验证本文提出的视频运动补偿算法的有效性,给出了基于本文方法与基于传统三点对应方法[14]的比较。为了便于比较,通过对两帧补偿后图像进行差分检测来说明算法效果,一般补偿效果较好的图像差分后留下的噪声较小。运动补偿实验结果如图6所示,图6a、图6b为原始图像,图6c、图6d分别是使用文献[14]中的方法和本文方法对图6b图像补偿后的差分检测结果。从实验结果可以看出,利用本文方法检测出的背景噪声较小,说明本文方法具有较好的鲁棒性。另外,实验选取了48个特征点进行跟踪比较,通过计算得出的这48个特征点的平均绝对值误差和最大绝对值误差如表3所示,由表中数据可知,本文提出的运动补偿方法补偿后得到了很好的效果。
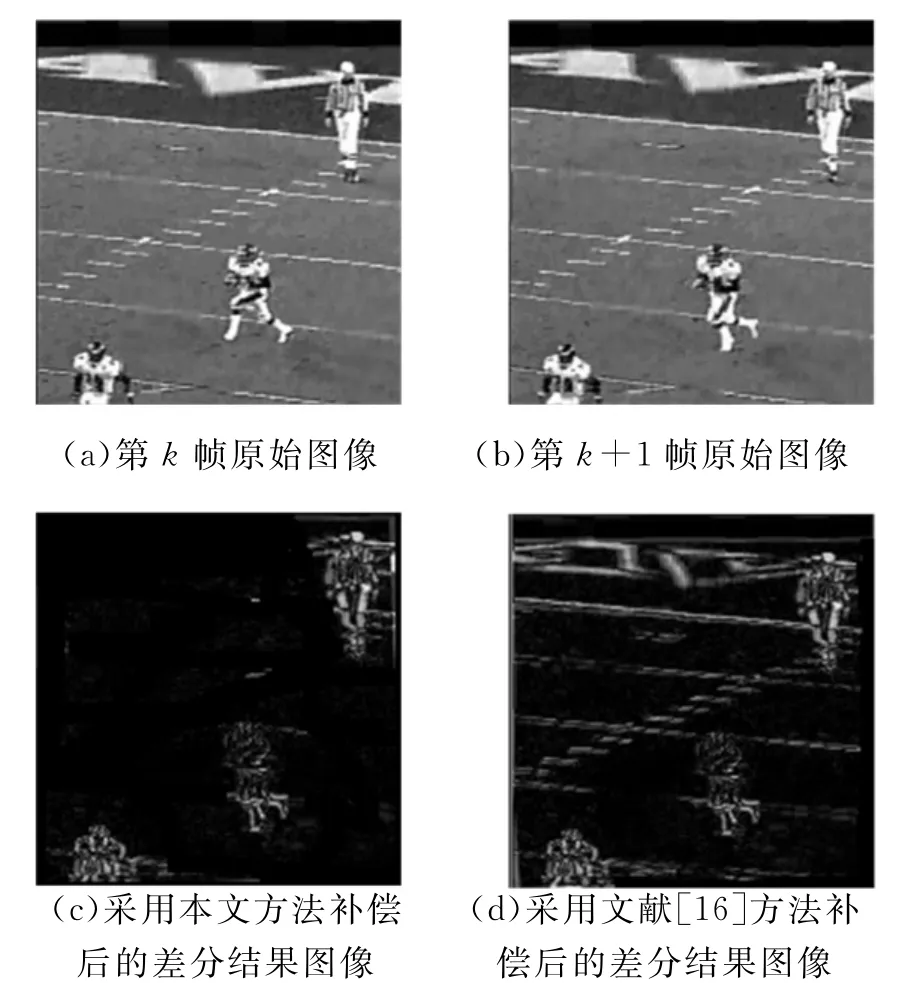
图6 运动补偿实验结果

表3 视频运动补偿精度测试结果
5 结语
本文研究了在振动环境下基于计算机视觉技术对显示设备显示性能检测与分析中的关键技术,首先通过设计摄像机移动测量支架减小了大部分振动对摄像机拍摄的影响,然后通过引入视频运动补偿算法较好地解决了摄像机轻微振动对检测结果的影响问题;最后应用亚像素线段的检测方法,通过检测分析图像中十字交叉线的位置,实现了显示设备在振动环境下显示性能的自动检测与分析。
[1]Halliwell N A,Hocknell A,Rothberg S J.On the Measurement of Angular Vibration Displacements:a Laser Tiltmeter[J].Journal of Sound and Vibration,1997,208(3):497-500.
[2]Wong W O,Chan K T.Quantitative Vibration Amplitude Measurement with Time-averaged Digital Speckle Pattern Interferometry[J].Optics and Laser Technology,1998,30(5):317-324.
[3]Olaszek P.Investigation of the Dynamic Characteristic of Bridge Structures Using A Computer Vision Method[J].Measurement,1999,25(3):227-236.
[4]白顺科,汪凤泉.振幅测量的平均成像法[J].工程力学,1999,16(6):107-112.Bai Shunke,Wang Fengquan.Measurement of Vibration Amplitude by Time-average Imaging[J].Engineering Mechinics,1999,16(6):107-112.
[5]Ma Zhong,Zhao Xinbo,Hou Yang.An Approach to Extract Straight Lines with Sub-pixel Accuracy[C]//2011Sino-foreign-interchange Workshop on Intelligent Science and Intelligent Data Engineering.Xi’an,2011:124-130.
[6]石奇端,马履中.六自由度并联机构组合弹簧阻尼减振装置[J].农业机械学报,2007,38(8):128-131.Shi Qiduan,Ma Lüzhong.Research on the Device of 6-DOF Parallel Mechanisms Combined with Elastic Damping System[J].Transaction of the Chinese Society for Agricultural Machinery,2007,38(8):128-131.
[7]Ma Zhong,Zhao Xinbo,Zhang Ke.A Robust Background Registration Method for Moving Camera[C]//2010Second International Conference on Future Computer and Communication.Shanghai,2010:632-635.
[8]Dirk S F.Automatic Video Segmentation Employing Object/Camera Modeling Techniques[D].Eindhoven:Eindhoven University of Technology,2005.
[9]Bay H,Tuytelaars T,Van Gool L J.Speeded up Robust Features(SURF)[J].Computer Vision and Image Unstanding,2008,110(3):346-359.
[10]de Berg M,Cheong O,van Kreveld M.Computational Geometry:Algorithms and Applications[M].Berlin:Springer,2008.
[11]Hough P V C.Machine Analysis of Bubble Chamber Pictures[C]//International Conference on High Energy Accelerators and Instrumentation.Geneva,1959:554-556.
[12]Duda R O,Hart P E.Use of the Hough Transformation to Detect Lines and Curves in Pictures[J].Communications of the Association for Computing Machinery,1972,15(1):11-15.
[13]Matas J,Galambos C,Kittler J.Robust Detection of Lines Using the Progressive Probabilistic Hough Transform[J].Computer Vision and Image Understanding,2000,78(1):119-137.
[14]Chien S Y,Ma S Y,Chen L G.Efficient Moving Object Segmentation Algorithm Using Background Registration Technique[J].IEEE Transactions on Circuits and Systems for Video Technology,2002,12(7):577-586.