基于计算力矩的助行腿机器人神经网络补偿控制
2013-09-07冯治国
冯治国
贵州大学,贵阳,550025
0 引言
步行训练机器人系统LOKOMAT、LOPES、GBO是针对脊椎损伤(spinal cord injury,SCI)患者进行步态康复训练的自动化设备中的典型代表。该类机器人具有 “机器主动”和“患者主动”两种运动训练模式。“机器主动”和“患者主动”运动训练模式的控制策略研究已成为国际康复训练机器人领域的热点。文献[1-2]为 LOKOMAT机器人主动训练模式设计了比例-微分(proportion-differential,PD)反馈位置控制器,采用力/位置混合自适应控制方法,实现了患者主动训练。文献[3-4]在研究阻抗控制基础上,提出了自适应协作控制算法,实现了LOPES与患者交互作用力的控制。文献[5-6]采用PD反馈轨迹跟踪控制方法实现了GBO的机器主动训练,且提出了基于阻抗控制的患者主动训练控制算法。上述控制方法大多忽略了机器人动力学模型以及环境等不确定因素,这将影响对期望关节角位移和力矩的跟踪能力,以至于影响对康复训练以及评估参数的提取。
本文针对研究的步行康复训练助行腿机器人系统,采用拉格朗日法,建立了“机器主动”运动训练模式下人机系统的动力学模型,且设计了基于计算力矩加PD反馈的神经网络控制器,以实现助行腿机器人与患者系统的主从跟随控制,弥补机器人动力学模型的不确定性,提高助行腿轨迹跟踪能力。
1 助行腿机器人动力学模型
为了研究助行腿步行动态特性,根据减重步行原理,结合助行腿的结构(图1),作如下假设:①助行腿在矢状面上运动,即髋关节、膝关节只是弯屈、伸展运动;②助行腿的髋关节在水平方向运动被限制,只在垂直方向运动;③支撑脚连续接触跑步机,并随跑步机一起运动;④单条助行腿是三连杆机构,包括髋关节、膝关节、踝关节、大腿、小腿和脚;⑤“机器主动”训练时,训练患者的腿与助行腿视为一体,即助行腿的负载变为固有质量。助行腿机器人在跑步机上的步行模型如图2所示。图2中模型参数描述见表1。

图1 助行腿机器人

图2 助行腿机器人步行模型

表1 助行腿模型参数
由步行模式分析可知,在一个完整步态周期内,助行腿在跑步机上步行包括单足支撑阶段和双足支撑阶段,但由于运动约束条件不同,动力学参数有区别。因此,针对步行周期的两个阶段,分别建立动力学方程,讨论系统动态特性。
1.1 助行腿单足支撑动力学模型
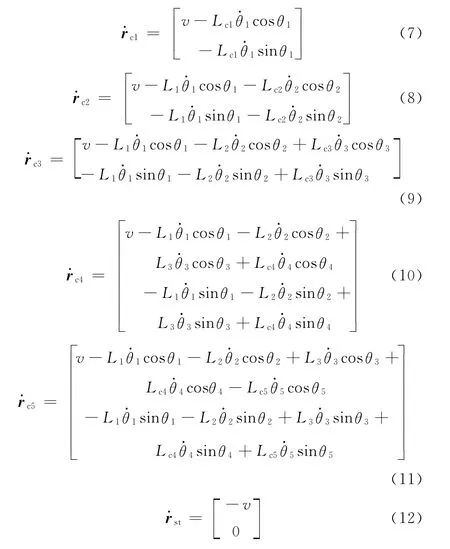
助行腿单足支撑时,支撑腿跟随跑步机运动,摆动腿处于悬空状态。此时,由图2所示位置关系,可求出每杆的质心位置矢量为


支撑脚端点位置矢量为

将式(1)~式(6)求导,可得相应位置的速度矢量为
因此,根据质心位置和速度即可求出系统拉格朗日能量函数:
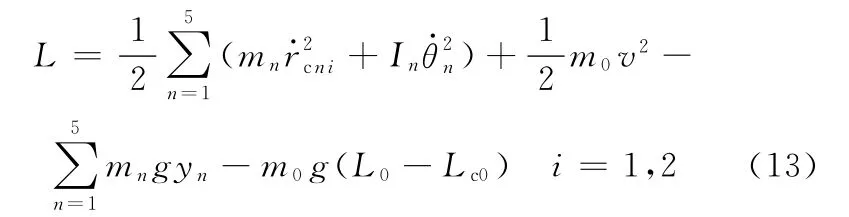
式中,g为重力加速度;In为转动惯量。
对式(13)求偏导和导数,建立第一类欧拉-拉格朗日方程,并避免冗余驱动,设T0=0(Ti为关节转动力矩,i=0,1,…,5),则有
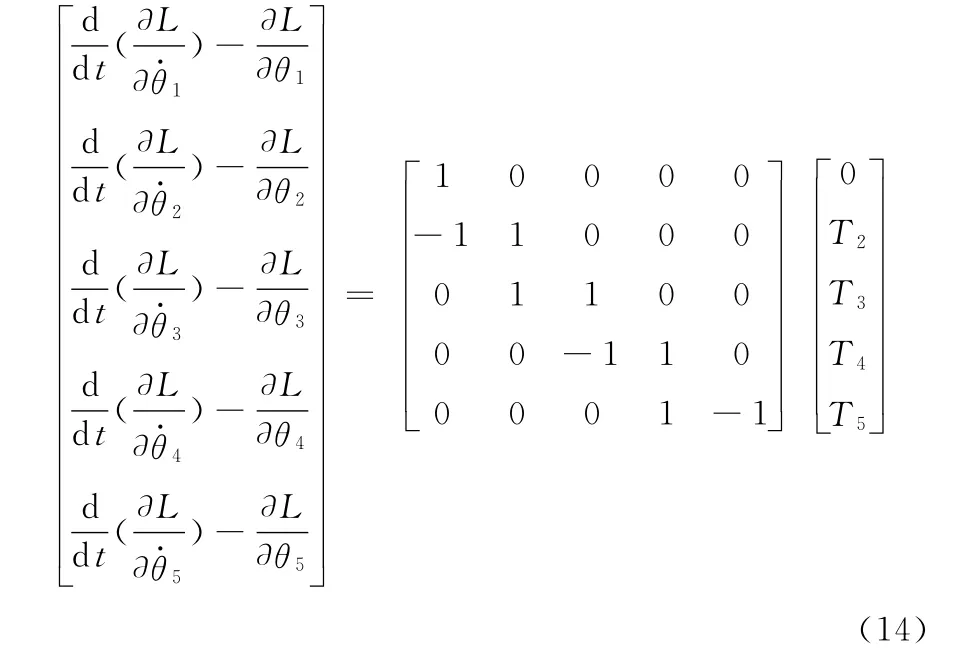
将式(14)写成下面的标准形式:

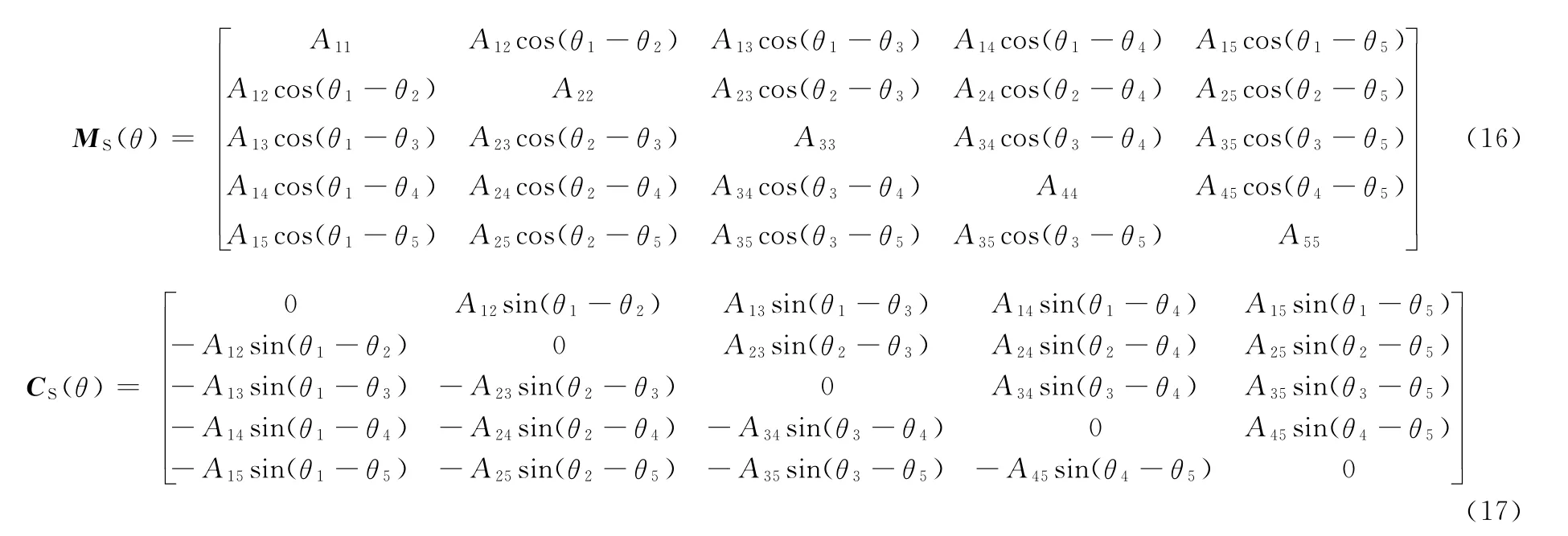
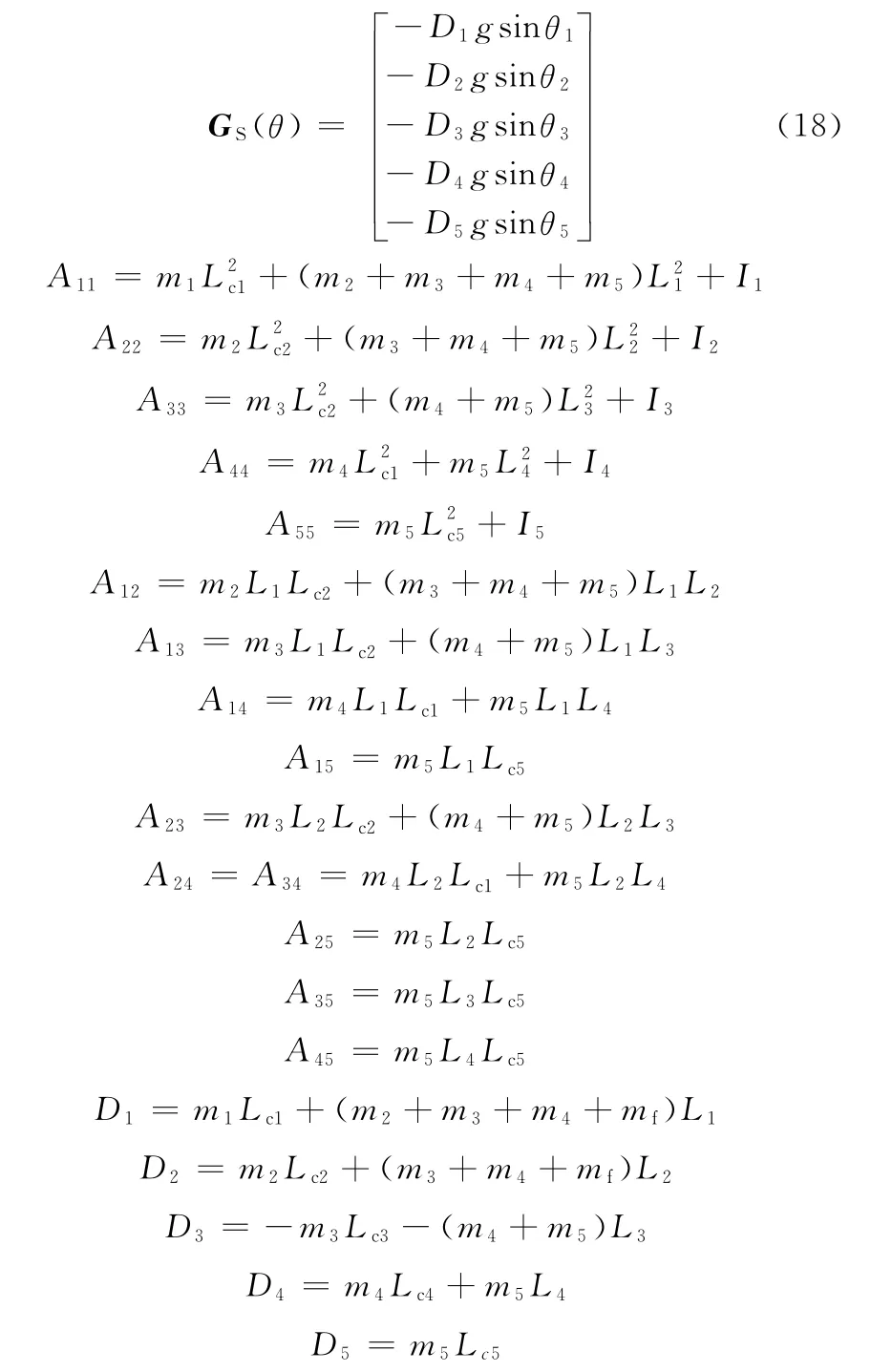
式中,mf为脚的质量。
1.2 助行腿双足支撑动力学模型
在双足支撑阶段,双足与跑步机接触,且没有相对滑动,因此构成闭链结构,动力学模型的建立存在运动约束问题。运动约束方程为

利用约束方程产生雅可比矩阵J(θ),将双足所受跑步机施加的作用力f映射到关节空间。因此,用与单足支撑动力学相同的推导方法,可求出双足支撑时动力学方程为

式(20)中各系数矩阵含义同式 (15),MD是5×5对称惯性力矩阵,CD为5×5反对称向心力和哥氏力矩阵,GD为5×1重力矩阵,TD为关节力矩。
2 基于计算力矩加PD反馈的神经网络控
“机器主动”训练模式时,文献[7]中采用的计算力矩加比例加PD控制方法由于受系统的不确定因素影响,只能实现有偏跟踪。为此,本文利用神经网络具备的逼近任何非线性函数的能力、自学习及自适应能力,对到助行腿机器人关节计算力矩的不确定性部分进行补偿控制,以提高系统轨迹跟踪能力,实现无偏轨迹跟踪。
目前,应用于非线性系统辨识和控制中的神经网络主要有反向传播(backpropagation,BP)和径向基函数(radial basis function,RBF)。两者主要区别在于非线性映射上作用函数不同,前者的S作用函数是全局的,后者的RBF作用函数为局部的,较前者结构更为简单,网络优化速度更快[8-10]。因此,本文将径向基函数神经网络应用于助行腿机器人补偿控制,消除控制中的不确定性因素。
由图3所示的基于计算力矩加PD反馈的RBF神经网络补偿控制方案可以看出,控制助行腿机器人的输入为

TCT是计算力矩控制器的输出;TNNC是RBF神经网络补偿控制力矩,定义为

其中,M(θ)为惯性矩阵是助行腿系统中不确定性f′的估计,定义为

式中,φ(X)为高斯函数的输出最佳RBF神经网络权值W*的估计值;ci为高斯基函数的中心矢量;σi为高斯基函数形状的宽度。

图3 RBF神经网络补偿控制
由文献[7]中计算力矩加PD反馈控制器可知:

式中,KD为微分增益矩阵;KP为比例增益矩阵;C(θ)为哥氏力矩阵;G(θ)为重力矩阵;e为角度偏差为期望加速度。
由式(15)、式(21)~ 式(24),可得

式(25)表示机器人逆向动力学建模误差与跟踪误差之间的关系,可以将其用状态空间的形式表达如下:

式中,η为RBF神经网络建模误差。

当神经元网络自适应权值更新选取很合适时,系统跟踪误差向量是渐进稳定的。定义Lyapunov函数为

式中,P为正定矩阵。

由式(26)、式(28)得到:

将Lyapunov方程PA+ATP=-Q代入式(29)可得



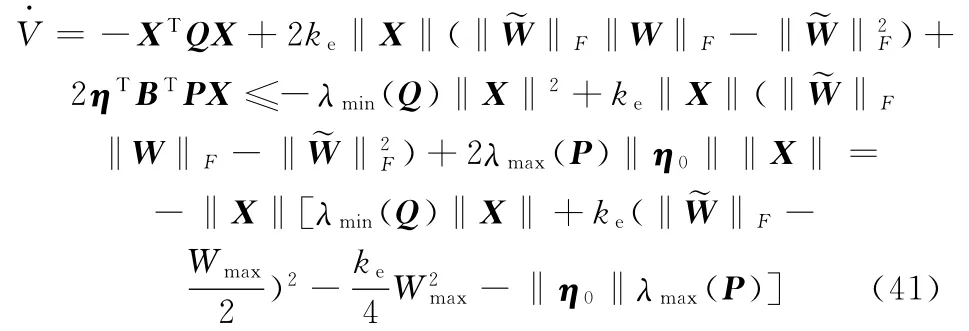
则式(31)可写成:


式中,λmin(Q)、λmax(P)分别为矩阵Q、P的最小、最大特征值;η0为建模误差的上界。
即系统误差收敛条件为

通过分析式(35)可知,Q的特征值越大,P的特征值越小,神经网络建模误差η的上界η0越小则X越收敛,跟踪效果越好。此神经网络是无重构误差的理想状况,实际中存在误差,该方法无法保证神经网络权值的有界性。

神经网络权值的自适应调整为

由式(31)、式(37)可得

根据范数性质,可推出:
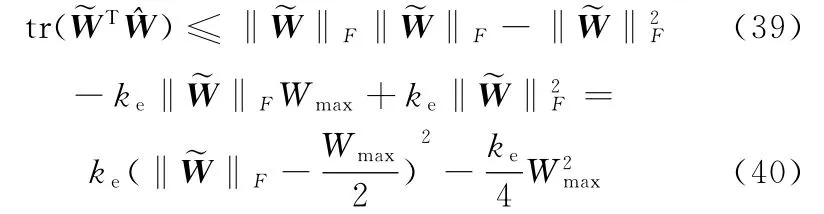
式中,Wmax为神经网络权值中的最大值。
由式(38)~ 式(40)可得

即收敛条件:

采用上述方法可保证控制系统状态估计与神经网络权值一致且最终有界,系统不确定因素导致的建模误差域 ‖η0‖ 决定系统跟踪误差收敛域‖X‖。
3 仿真实验
本文利用建立的ADAMS-MATLAB助行腿机器人虚拟样机协同仿真平台进行助行腿动力学模型和运动控制算法的仿真验证。仿真实验中,助行腿机器人步行模型机构参数见表2。仿真数据是利用美国Motion Analysis公司的Hawk数字动作捕捉及分析系统在跑步机上进行真人步行实验时采集的步态数据,采样周期为0.02s,步态为周期1s,步长为0.5m。

表2 助行腿的结构参数
为对比分析计算力矩加比例加PD控制和基于计算力矩加PD反馈的神经网络控制方法的轨迹跟踪效果,首先进行计算力矩加PD控制方法的仿真,经过多次仿真实验,调整比例微分参数,确定KP=diag[50 50],KD=diag[50 50]。在RBF神经网络补偿控制方法中,取KP、KD取值相同。由于助行腿双腿可以视为两个独立控制体,所以将助行腿每条单腿作为控制单元,输入层为单腿两关节期望轨迹值与虚拟样机虚拟传感器测得实际的偏差值(下标h、k、a分别表示髋关节、膝关节、踝关节,输出层为对应关节的补偿力矩传递函数为高斯函数,仿真时初始权值W设为[-10,10]之间的随机数,将隐元中心设为ci=[-2 -1 0 1 2],bi=[1](i=1,2,3,4),助行腿各关节位置误差和初始速度均设为零。采用方法(2)的自适应权值调整律。
从图4和图5可知,髋关节、膝关节和踝关节角位移误差范围分别为-0.156~0.28rad、-0.146~0.08rad、-0.005~0.095rad;髋关节角、膝关节角和踝关节角速度误差范围分别为-0.18~0.2rad/s、-0.39~0.41rad/s、-0.33~0.22rad/s。上 述 结果表明计算力矩加PD控制方法能够达到预期的控制效果。但此方法控制效果容易受以下因素的影响:①系统建模误差、扰动等一些不确定因素;②计算力矩中由于采取简化计算或近似算法,导致助行腿的连杆质量分布及转动惯量计算不准确,引入额外误差;③由于忽略助行腿中一些小零件,因此计算力矩没有考虑小部件影响,产生偏差。图6和图7是引入RBF神经网络补偿控制的仿真结果,髋关节、膝关节角和踝关节角位移误差范围分别为-0.053~0.087rad、-0.043~0.025rad、-0.027~0.023rad;髋关节、膝关节和踝关节角速度误差范围分别为-0.063~0.068rad/s、-0.086~0.096rad/s、- 0.098 ~0.088rad/s。对比分析结果,采用RBF神经网络对计算力矩误差进行补偿后,助行腿的关节角位移、角速度误差变得更小,一定程度上提高了计算力矩的精度,使得助行腿关节轨迹跟踪能力明显提高。
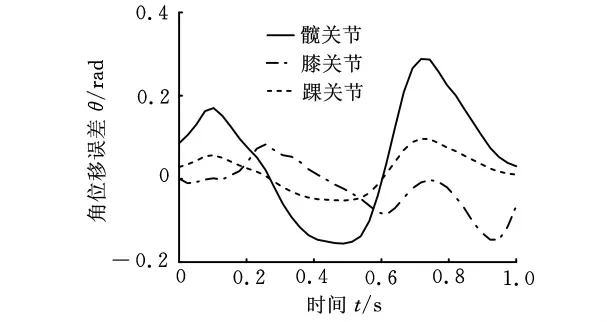
图4 关节角位移曲线
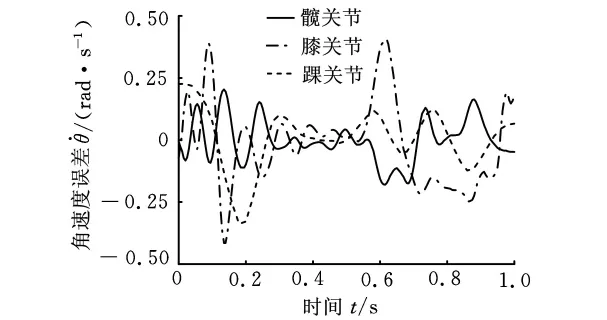
图5 关节角速度曲线
4 系统测试实验
根据设计的“机器主动”训练模式控制策略,在搭建的样机平台上进行无人空载步行实验,以测试系统在空载下助行腿关节的轨迹跟随情况。
实验过程中,为了检验助行腿关节轨迹跟随状况,采用编码器反馈采集外骨骼关节运动轨迹。采用模拟量输出的编码器容易受电磁干扰,本实验中主要受伺服电机的影响。为了消除不确定干扰因素,对编码器的输出进行滤波、添加屏蔽线等操作。为进一步检验编码器反馈数据是否满足要求,使用NDI运动捕捉仪进行助行腿关节轨迹检测。图8~图10所示为5s步态周期空载状况下,外骨骼助行腿髋关节、膝关节和踝关节的期望轨迹、编码器采集数据和NDI运动捕捉仪采集数据的比较。髋关节误差在±1°内,膝关节,踝关节误差在±0.5°内。图中表明,理论值与编码器采集数据最大误差产生在关节的最大角度处,主要是由于步行过程中助行腿的惯性引起的,此外,助行腿系统机械装配间隙误差,如驱动器与关节连接头部、关节轴轴向窜动等也是产生误差的因素。系统零位设置(主要靠操作人员调整)等影响因数会造成轨迹跟踪误差。

图6 关节角位移曲线(RBF补偿)

图7 关节角速度曲线(RBF补偿)

图8 5s步态周期髋关节角度轨迹
5 结束语

图9 5s步态周期膝关节角度轨迹

图10 5s步态周期踝关节角度轨迹
本文利用拉格朗日法,建立了“机器主动”运动训练模式下助行腿机器人系统在跑步机上步行的动力学模型,并在虚拟样机协同仿真平台进行动力学仿真求解运算,为研究助行腿机器人“患者主动”运动训练模式时的动态特性奠定基础。
基于计算力矩加PD反馈的RBF神经网络补偿控制,可以保证轨迹跟踪的渐近稳定,较计算力矩加PD反馈控制更能实现助行腿机器人关节非线性系统的时变轨迹跟踪控制,达到了消除系统动力学模型不确定因素,提高轨迹跟踪控制性能的目的。
[1]Riener R,Lunenburger L,Jezernik S,et al.Patientcooperative Strategies for Robot-aided Treadmill Training:First Experimental Results[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2005,3(13):380-394.
[2]Jezernik S,Colombo G,Morari M.Automatic Gaitpattern Adaptation Algorithms for Rehabilitation with a 4-DOF Robotic Orthosis[J].IEEE Transaction on Robotics and Automation,2004,20(3):574-582.
[3]Agrawal S K,Banala S K,Fattah A.Assessment of Motion of a Swing Leg and Gait Rehabilitation with a Gravity Balancing Exoskeleton[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2007,15(3):410-420.
[4]Banala S K,Kulpe A,Agrawal S K.A Powered Leg Orthosis for Gait Rehabilitation of Motor-impairedPatients[C]//IEEE International Conference on Robotics and Automation.Roma,2007:4140-4145.
[5]Asseldonk E H,Veneman J F,Ekkelenkamp R.The Effects on Kinematics and Muscle Activity of Walking in a Robotic Gait Trainer during Zero-force Control[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2008,16(4):360-370.
[6]Ekkelenkamp R,Veneman J F,Kooij van der H.Selective Control of Gait Functions during the Gait Rehabilitation of CVA Patients[C]//IEEE 9th International Conference on Rehabilitation Robotics.Chicago,2005:361-364.
[7]Feng Zhiguo,Qian Jinwu,Zhang Yanan,et al.Dynamics Modeling and Motion Control for Lower Limb Exoskeleton Orthosis[J].Chinese High Technology,2009,19(3):267-272.
[8]Teixeira R,Braga A P,Menezes B.Control of a Robotic Manipulator Using Artificial Neural Networks with On-line Adaptation[J].Neural Processing Letters,2004,12:19-31.
[9]Wang Dongshu,Shen Dazhong.A Method of an Enhanced Computed-torque Control for Robot with a Neural-compensator[J].Chinese High Technology,2007,17(5):479-483.
[10]贺红林,刘文光,汪洋.直接驱动机器人的函数链神经网络PD复合控制[J].中国机械工程,2012,23(21):2061-2066.He Honglin,Liu Wenguang,Wang Yang.Tracking Control of Robotic Manipulator Using a Hybrid Controller Composed of an Artificial Neural Network and a PD Sub-controller[J].China Mechanical Engineering,2012,23(21):2061-2066.