基于可视化技术的核电站水下机器人地面站设计❋
2013-09-04郭晓旗丑武胜
郭晓旗,丑武胜,方 斌
(北京航空航天大学 机器人研究所,北京 100191)
1 概述
核电已经成为当今世界的重要能源。因为核作业环境的特殊性,需要一些核电站专用机器人来替代人工完成任务[1,2]。核电站水下机器人就是其中的一种,它用在核电站的反应堆水池、乏燃料水池等场所执行测查和检测任务[3]。由于核辐照的影响,工作人员需要在远离反应堆水池的地方对水下机器人实施远程控制,所以要开发适用于核电站微小型水下机器人的远程地面站系统。
国内外在核电站水下机器人地面站系统的设计上取得了一定的成果。中国科学院成都光电研究所研制的核电站水下机器人地面站根据安置在机器人前方的摄像头和灯采集到的图像回传信息实现对机器人的实时控制[4]。该系统可以初步实现水下机器人周围环境信息的检测,但无法确定水下机器人在工作水池中的定位位置,此外,受摄像头视角的影响,无法全面获得水下机器人周围环境信息,这大大增加了机器人发生事故的概率和工人操控机器人的难度。文献[5]中研制的一款韩国KeproVt核电站水下机器人的地面站系统,利用机器人顶部安置的摄像头和小灯进行图像信息回传,由反应堆水池上方的摄像头进行水下机器人定位,利用回传的图像信息和机器人定位信息对水下机器人进行人工遥感控制。这种方式可以在一定范围内实现机器人的超视距远程控制,但是需要在工作水池岸边增加设备,而且对机器人的运动空间有严格的限制,不能超出岸边摄像头的视角,减小了水下机器人的有效工作区域。
本文利用可视化技术建立三维动画空间和水下机器人的3D姿态模型,利用深度计、加速度计、陀螺仪多传感器系统信息控制3D姿态显示,结合声纳成像图、摄像机回传图设计了一套功能完善的水下机器人地面站系统,实现了对水下机器人的远程可视化控制。
2 地面站系统总体框架
地面站的主要任务是对水下机器人采集的传感器回传数据进行实时分析,动态显示水下机器人运动状态、目标现场图像及位置信息并定时向机器人本体发送控制指令,实现对水下机器人的实时控制。该系统主要分为水下机器人运动状态监测显示模块、运动控制模块和任务控制模块3个部分,系统框架见图1。
2.1 运动状态监测
水下机器人的运动状态监测是遥控地面站的核心功能之一,要求地面站对水下机器人运动的全过程进行状态控制。通过远程485串口与水下机器人实现实时通讯,将水下机器人的运动姿态、位置坐标以及水下机器人周围环境状态信息及时回传,实时对水下机器人的运动状态监测。其主要组成及功能如下:①反应堆水池虚拟空间,主要功能是辅助水下机器人3D模型显示水下机器人当前在水池中的姿态,以及辅助声纳和深度计回传信息显示水下机器人位置;②水下机器人3D姿态模块,用于动态显示机器人当前姿态信息,实现水下机器人的俯仰角、滚转角和航向角的3D姿态的动态显示;③声纳显示模块,用于显示扫描声纳的平面扫描成像图,精确显示水下机器人所在深度及周围的环境信息;④传感器数据显示部分,显示水下机器人的各项运动参数,操作人员可以通过该部分了解到水下机器人的运动状态;⑤视频显示模块,用于显示水下机器人前、后两个摄像机回传的图像信息,操作人员可以通过此部分了解水下机器人周围的环境信息及水下机器人的工作状态。
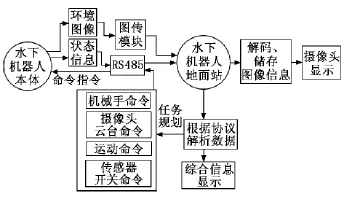
图1 遥控系统的系统框图
2.2 运动控制部分
地面站运动控制功能主要包括控制水下机器人运动模式切换、姿态控制、位置控制3个方面,主要通过系统控制箱实现运动控制功能。水下机器人运动模式的切换可以使水下机器人在手动遥控模式、半自动航行模式、半自动定深控制模式之间切换。姿态控制实现水下机器人的滚转、俯仰、航向3个姿态角的实时控制,满足水下机器人作业时的姿态要求。位置控制主要通过操控摇杆实现水下机器人在水下的平面位置、深度等工作位置的改变来满足工作要求。
2.3 任务控制部分
地面站的任务控制功能主要包括工作任务切换、工作任务执行两个方面。任务切换主要是在水下机器人巡航任务和机械手任务模式之间进行切换。工作任务执行包括水下机器人半自主巡航模式下的水下检查任务以及机械手水下作业任务。
3 可视化技术的实现
利用可视化技术在超视距状态下对水下机器人本体有效控制是地面站系统的核心功能。可视化技术主要是通过现场环境的视频图像、水下机器人的3D姿态图、扫描声纳的环境成像图、虚拟工作空间辅助显示实现。操作人员通过虚拟工作空间中水下机器人的3D姿态图来了解当前水下机器人的姿态信息,通过扫描声纳的环境成像图来了解水下机器人当前深度位置的二维平面信息,通过现场环境的视频图像了解现场实际工作情况,在视野之外通过控制箱操纵水下机器人,使其完成当前的工作任务。
3.1 OpenGL下的水下机器人模型设计
3.1.1 模型的建立与转换
在OpenGL中很容易实现模型的各种变换,但是由于OpenGL中并没有提供建模的高级命令,其是通过基本的几何图元——点、线、多边形来建立三维模型的,构建复杂模型过程十分繁琐。本文利用Pro/E建模软件建立三维模型,然后转换成OpenGL的C代码,以实现水下机器人的3D姿态图。[6,7]
首先利用Pro/E建立水下机器人的3D姿态模型并保存为*.igs格式,为了以后设计中的导出和导入,还需要利用3DMAX将*.igs模型导成*.3ds格式。关于如何用OpenGL读取和操作3ds文件的方法有很多,这里使用view3ds将3ds文件进行格式转换,生成水下机器人模型的OpenGL的C代码。转换后生成*.gl、*.h文件,*.h文件中定义了模型的材质数组、坐标点数据集和显示列表函数。
3.1.2 仿真模型导入
将view3ds生成的*.h和*.gl两个文件复制到工程中,之后在OpenGL的初始化函数中调用*h文件中的显示列表函数,就可以将核电站水下机器人模型导入工程中。OpenGL中生成的水下机器人模型如图2所示。
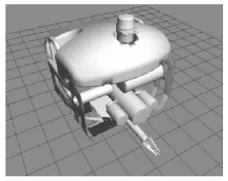
图2 OpenGL中生成的水下机器人模型
3.1.3 模型姿态的仿真与控制
水下机器人模型导入显示后,利用glRotatef(angle,x,y,x)旋转函数和glTranslatef(x,y,z)平移函数可以模拟水下机器人的前后、左右、上下六个自由度的航向运动。利用485串口将传感器回传信息与旋转平移中的函数参数相对应,实现水下机器人姿态在虚拟环境中的实时显示。
3.2 扫描声纳环境成像图的实现
扫描声纳是利用发射基阵在水中发射出声脉冲,通过这些脉冲产生的回声对水下目标进行测距。声纳从扫描的各个方位接收到回波信号,如果在某个方向上存在障碍物,该方向返回的声波就会出现强度的波动,而不存在物体(背景)和被物体遮挡住的地方波动会非常小甚至没有回波。同时,由于水下混响和噪声的影响,还会接收到一些无意义的干扰信号[8,9]。扫描声纳首先对信号进行预处理,然后绘制环境成像图。
3.2.1 扫描声纳的信号预处理
预处理可消除大量无用的信号和噪声的干扰,数据量会显著减少,提高运算效率。这里使用阈值法进行去噪,根据回波强度的领域,可以将声纳数据的一个声像分为目标区域、背景区域和阴影区域。根据回波返回特性可知,信号采样阈值的选择对目标检测有重要的影响,如果阈值选择过低,会保留过多的背景信息,使得目标信号不明显,甚至会淹没在背景中;如果阈值选择过高反而会保留过多的噪声,并且丢失部分目标信息。因为水下噪声信号一般集中在高频段,所以在信号滤波时我们设定上、下两个采样阈值T1和T2,用来滤除信号强度较大的噪声信息和部分信号强度大于背景区域和阴影区域的信息。这里把采样阈值上限T1设定在50dB~60dB之间,下限T2设定在10dB~20dB之间,既可以较好地保留目标信息也可以去除部分高强度噪声的干扰。
3.2.2 扫描声纳的界面设计
扫描声纳的界面是根据图像生成原理和信号预处理后得到的数据,在MFC中开发实现的。在Windows窗口绘图,在DC(Device Content)中进行操作,DC保存了输出设备上所需绘图的GDI属性,负责翻译绘图操作并将结果传送到实际设备[10]。在 MFC中,调用CreateCompatibleDC()函数创建兼容DC,然后调用GDI函数绘制声纳界面和处理后的声纳数据,最后拷贝到屏幕DC上完成声纳图形绘制。声纳每完成360°扫描,刷新图像,把声纳回传新数据显示在声纳图中。
4 系统的运行结果
根据上述几个功能模块的实现,在水池内进行系统调试试验。系统运行结果如图3~图5所示。该实验表明系统达到了目标要求,能够完成既定工作任务。
5 结束语
本文设计的基于虚拟现实技术的面向核电站水下机器人的地面站系统,可以实时对水下机器人进行运动控制、调节运动姿态,操控机械手进行水下作业。基于可视化技术,系统通过建立水下机器人的3D姿态模型,融合扫描声纳、深度计、多传感器和前后摄像头回传的图像信息,实时动态显示水下机器人的姿态、位置、状态信息,从而实现了水下机器人在超视距状态下的远程遥控操作,运行效果良好。该系统在核电站检修、检查、异物打捞方面有广阔的应用前景。
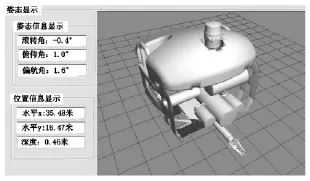
图3 水下机器人3D姿态及空间位置显示图
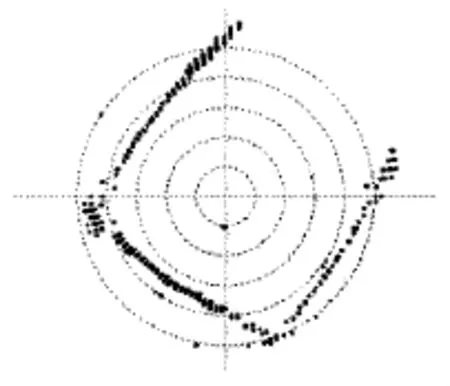
图4 扫描声纳成像图
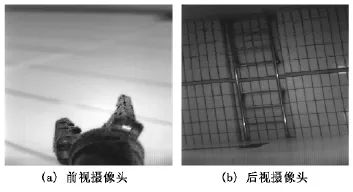
图5 前、后摄像头回传图像
[1] Mitsuru O,Yutaka K,Masahiro K,et al.Advanced inspection technologies for nuclear power plants[J].Hitachi Review,2009,58(2):82-87.
[2] 刘青松,张一心,董亚超,等.核电站机器人技术应用现状及发展趋势[J].机器人技术与应用,2011(3):12-16.
[3] Seungho K,Seung 图 图,Sung U.Application of robotics for the nuclear power plants in Korea[C]//2010 1st International Conference on Applied Robotics for the Power Industry.Montréal:[s.n.],2010:1-5.
[4] 李声.多功能水下机器人:中国,200610089503.6[P].2006-12-13.
[5] Byung-Hak C,Seung-Hyun B,Chang-Hoon S,et al.Underwater robotic system for visual inspection of nuclear reactor internals [J].Nuclear Engineering and Design,2004,231:327-335.
[6] 朱晓林,叶家玮.基于OpenGL和3DMAX水下机器人运动可视化研究[J].科学技术与工程,2009,9(24):7528-7529.
[7] 刘一凡,刘国昌.基于Pro/E的仿真技术研究与应用[J].机械制造与研究,2007(4):22-23.
[8] Burguera Antoni,Gonzalez Yolanda,Oliver Gabriel.The UspIC:performing scan matching localization using an imaging sonar[J].Sensors,2012,12,7855-7885.
[9] Burguera A,Gonzalez Y,Oliver G.Underwater scan matching using a mechanical scanned imaging sonar[G]//Proceedings of Intelligent Autonomous Vehicles(IAV).Lecce:[s.n.]:2010:6-8.
[10] 何斌,马天予,王运坚,等.Visual C++数字图像处理[M].北京:人民邮电出版社,2001.
