基于低频传感器移动机器人自主跟踪系统设计
2013-09-04吴胜忠申兴发高申勇
吴胜忠,申兴发,高申勇
(杭州电子科技大学计算机应用研究所,浙江杭州310018)
0 引言
近年来,智能机器人在移动式机器人中占有很重要的地位,在此平台上可以搭建传感器来实现更多的功能。国外各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量人力物力,将其引入到诸多领域如自动控制、模式识别、微机械电子等[1]。国内基于自主移动机器人(智能机器人)平台开发的项目主要有机器人的循迹,障碍物规避等,用的方式也不尽相同,如红外线避障、超声波避障、声纳避障[2,3]等。大多数现有的项目都是针对固定目标定位,进行机器人自主避障循迹,本文设计的系统研究的主要内容是实现智能机器人自主跟踪移动目标,并与目标保持在一定范围内,对途中的障碍物进行自行规避。
1 系统结构设计
本文所设计的系统,基于国外已有的智能机器人平台,系统的整体框架设计如图1所示。图1表明,系统主要分为5块,近距离避障模块、双目立体相机避障模块、移动目标定位模块、车载服务器核心模块以及智能机器人模块。车载服务器是整个系统的核心,对3个模块(声纳避障模块、双目立体相机模块以及移动目标定位模块)的数据进行处理,制定机器人制动策略,同时与智能机器人进行实时交互。系统采用双目立体相机和声纳分别进行中远距离避障和近距离避障,对于目标的定位采用基于RSSI低频无线定位技术,车载服务器为小型车载计算机,而智能机器人为国外比较成熟的Pioneer 3-AT移动机器人。
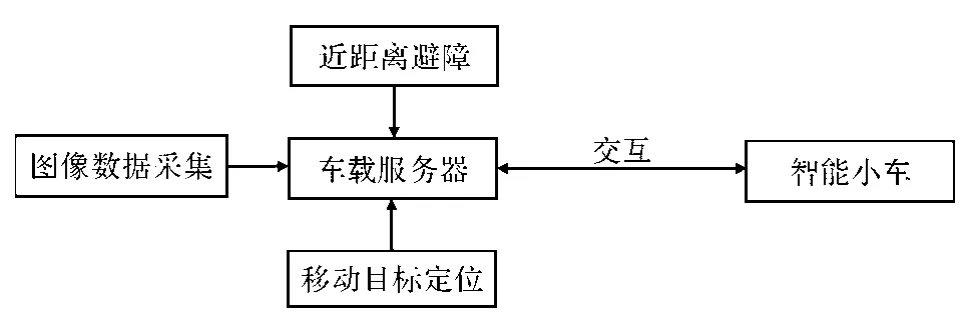
图1 系统整体框架
2 各个模块设计
2.1 图像数据采集
双目相机模块主要实现中远距离的障碍物规避功能,规避距离设定为1~2m。对于超出该范围及在1m范围内的障碍物,倾斜式放置的相机不进行检测,即视为无障碍物。由于机器人障碍物检测的特殊性(只需获取障碍物轮廓和深度范围),获取稀疏视差图即可满足条件,所以结合基于特征点深度和空间范围采用的聚类分割方法,建立了基于边缘特征点匹配和聚类分析的双目视觉避障算法[4,5]。
2.2 近距离避障
本系统所采用的基于ARCOS的Mobile Robots机器人最多可以支持4个声纳环,每个环最多有8个换能器,可以用于物体检测、距离检测和自动避障,面貌识别,定位,以及导航。机器人带有的声纳环位置都是固定的:两侧各有一个,另外6个以20°间隔分布在侧边。这种声纳阵的布置可以为机器人提供360°无缝检测,如图2所示。
每一次轮循中每一个声纳可以重复两次或者更多次。如果一个声纳数没有出现在其他已经改变的顺序中,该声纳环不会被起动。如果在一个序列里重复了某个声纳号,并且同一个声纳的两个读数出现在同一个数据包中,则机器人和相关的客户端将会忽略第一个读数。
声纳阵列的声纳环每40μs轮循一次,对于具有8个声纳环并且进行顺序轮循(例如轮循次序为1~8)的声纳阵列来说,任何一个声纳传感器每320μs便会被读取一次。由于系统中智能机器人采用了前向的双目立体相机进行中远距离的避障,所以本系统只启用了车首的8个声纳,采取多次旋转机器人进行机器人360°制动。
2.3 基于多传感器的移动目标定位
2.3.1 目标定位模块结构
本系统中,自主移动机器人所跟踪的目标是移动式的,需要实时进行目标的位置定位,从而确定机器人行进方向,制定移动策略。本系统所采用的移动目标定位方法为基于RSSI[6](接收信号强度指示)的低频无线定位技术,示意图如图3所示。
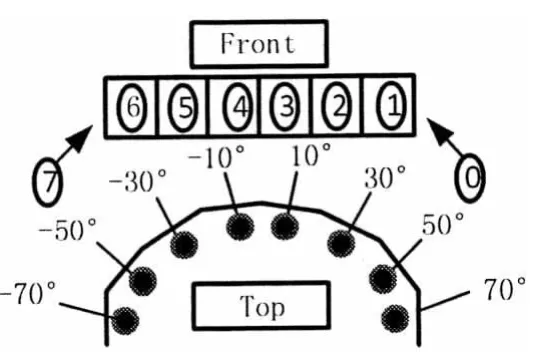
图2 机器人声纳环前向位置图

图3 基于RSSI低频无线定位技术的目标定位示意图
它是一种定位精度高、功耗都,成本低、反应速度快的高性能比无线定位技术。在基于RSSI的低频定位中,低频发射基站(安装在机器人上的传感器)的发送信号强度已知,待定位模块根据实际接收到信号强度计算出信号的传播损耗,利用理论和经验模型将传输损耗转化为距离。
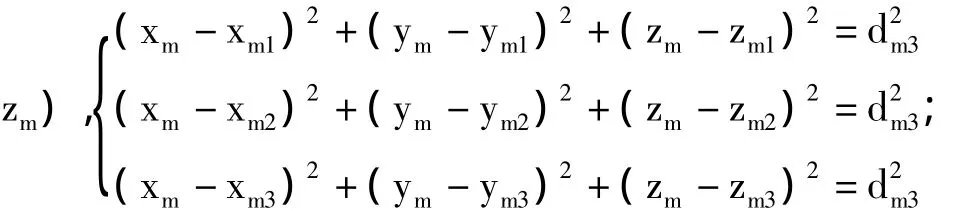
2.3.2 定位算法设计
图3中的车载定位模块使用了n(n≥3)个低频发射基站,可以得到n个距离值d1,d2,d3,…,dn,假设这 n 个基站的对应的坐标为为了能准确进行定位,本文采用的方法如下:
2.3.3 算法实验及结果分析
为了验证本文所设计的低频无线定位算法的优越性,采用3个低频发射基站进行引导模块的定位,同时与实际距离进行对比,对照图如图4所示。
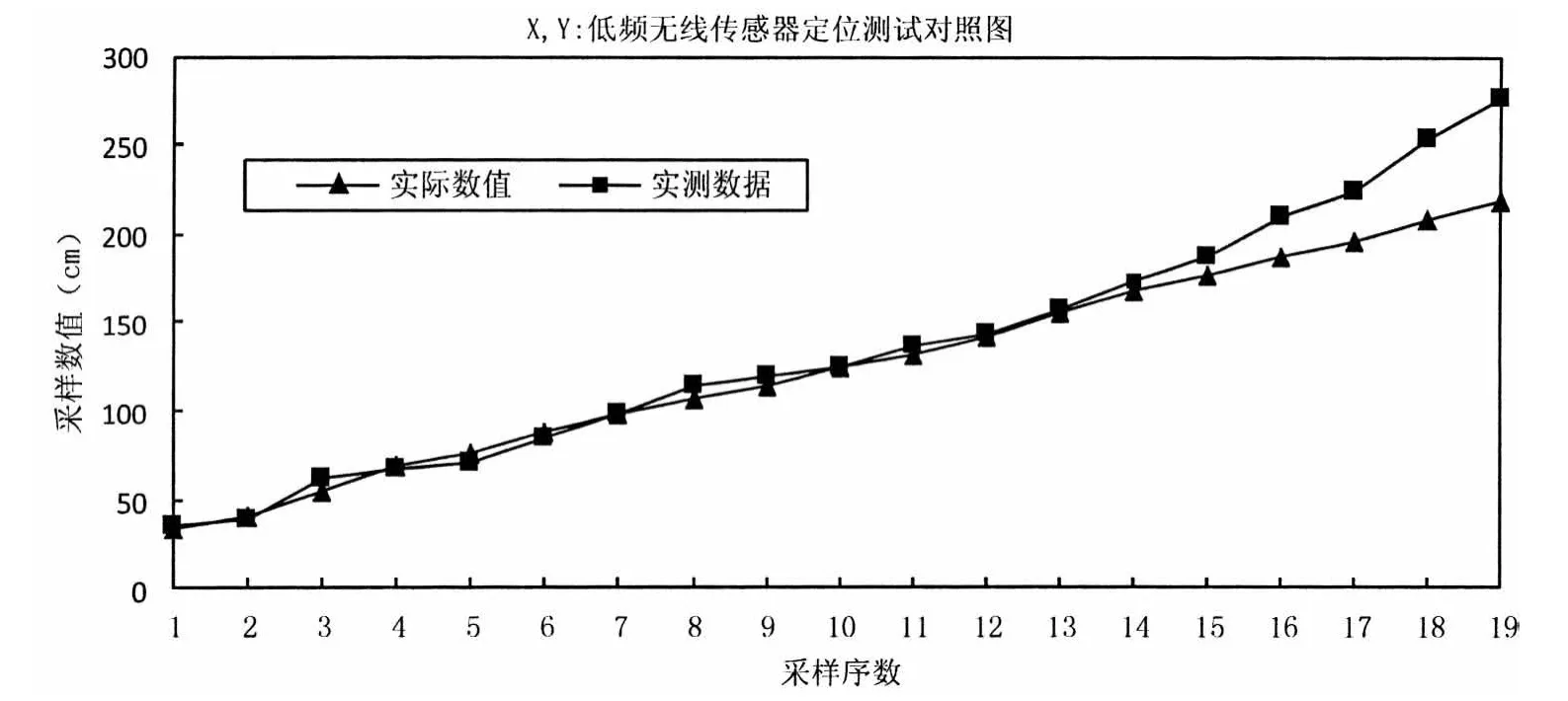
图4 实验测量值与实际值对比
图4中可以看出在200cm的范围内该算法能很好的进行引导模块的定位,而在200cm之后,由于无线信号易受环境等因素的影响,单个基站的距离定位不精确,故最终的计算结果与实际值误差增大。本文所采用的定位技术与现有的红外线及超声波定位技术等相比有较好的方向性,且红外线定位易于受物体或墙体阻隔,而超声波在传输过程中衰减明显从而影响其定位有效范围。
3 结束语
本文所采用的自主移动机器人为国外技术成熟的基于ARCOS的Mobile Robots机器人,在该基础上设计的基于智能机器人平台开发的自主移动机器人自动引导避障系统,选择移动目标,跟踪距离保持在一定范围内是该系统的两个创新点,这需要系统对目标实时定位跟踪,并进行机器人速度控制。该系统的下一步工作,将集中在机器人对目标与障碍物的区分、机器人转弯制动以及避障策略的进一步改进等。
[1]李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J].机器人,2002,24(5):475–480.
[2]Borenstein J,Koren Y.The Vector Field Histogram-Fast Obstacle Avoidance for Mobile Robots[J].IEEE Transactions on Robotics and Automation,1991,7(3):278 -288.
[3]Azarm K,Schmidt G.Integrated mobile robot motion planning and execution in changing indoor environments[J].In IEEE/RSJ International Conference on Intelligent Robots and Systems,1994,(1):298 -305.
[4]Mathies L,Brown E.Machine Vision for Obstacle Detection and Ordnance Recognition[C].Orlando:Proc of Annual Meeting of the Association for Unmanned Vehicle Systems,1996:170 -175.
[5]廖素英,杨华军.基于区域相关的动态匹配方法[J].光电工程,2004,12(1):137-140.
[6]陈维克,李文锋,首珩,等.基于RSSI的无线传感器网络加权质心定位算法[J].武汉理工大学学报,2006,30(2):265-268.
