基于地磁车辆检测技术研究
2013-09-04谢白杨李广亮杨志恺
谢白杨,李广亮,杨志恺
(1.杭州电子科技大学科技处,浙江杭州310018;2.杭州电子科技大学自动化学院,浙江 杭州310018)
0 引言
如何有效检测道路行驶车辆的实际情况,是实现智能交通的核心技术之一。在应用中利用地感线圈进行车辆的检测时要首先设计出振荡电路。当有大型金属物体如汽车经过时,由于空间介质发生变化,电路的振荡频率也产生相应变化(有金属物体时振荡频率升高),这个变化就作为汽车经过“地感线圈”的证实信号。关键技术是要设计出的振荡器稳定可靠并且要在车辆经过时频率变化明显[1]。在利用微波进行车辆检测时,检测器在扇形区域内发射连续的低功率调制微波。当有车辆驶入检测区域时,发射的微波得到反射。通过计算出射波和反射波的时间差,便可得知车辆的速度,车长等信息。微波探测器在恶劣条件情况下,仍能保证较高的检测准确性,但是检测器安装和调试精度要求较高,且当道路中间有铁质分隔带时,检测精度影响较大[2]。同样的利用超声车辆检测系统也可以实现[3],还有红外检测系统[4,5]。本文提出基于磁场方式的车辆检测技术,针对本技术提出多状态阀值自适应算法,最终实现车辆的实时性检测。
1 基于地磁的车辆检测原理
车辆各部件主要由铁磁物质构成,理论研究中可以将其简化为双极性磁铁的模型。当车辆进入地磁场时,其周围的磁场因为车辆自身磁场与地磁场相互作用而产生有规律变化。
沿地面方向建立X-Y坐标系,垂直分量Z垂直于坐标系。为了简化计算,假设车辆长度为d,θ车辆主轴与X方向的夹角,r为车辆中心位置,r1、r2为车头与车尾位置,车辆以速度v0行驶,当车辆行驶到位置r时,X,Y轴磁感应强度的表达式为:

2 基于总磁场强度的检测算法
实际情况时,由于车辆不是理想的双极性磁铁模型,以及检测时干扰的存在,实际波形与理想状态有很大的差异。车辆以5km/h和40km/h的速度通过时的实测波形分别如图1、2所示。图1、2中各个图形分别表示车辆以5km/h和40km/h速度通过时X轴、Y轴、Z轴的磁场强度以及总磁感应强度B的波形图。从响应波形可以看到,从响应峰值阈值可以大概判断有没有车辆通过,但由于干扰信号存在,波形可能形成多个峰值,从而造成误判。
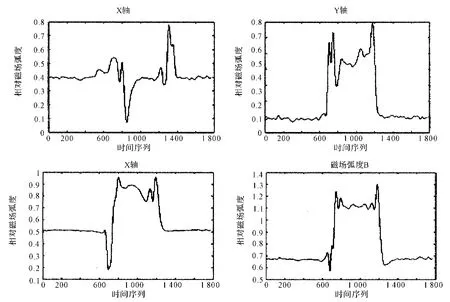
图1 车速5km/h各个坐标轴磁感应波形图
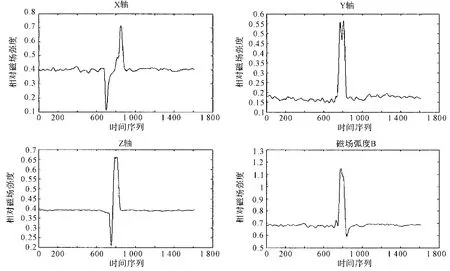
图2 车速40km/h各个坐标轴磁感应波形图
基于此提出多状态阀值自适应算法,来提供车辆判断的精度。在此算法中,将车辆检测过程分为以下4个状态:
(1)无车。无车辆经过,背景磁场在基值附近;
(2)疑似。磁场强度发生了较明显的变化,有疑似扰动波形产生;
(3)确认。对本状态维持时间t进行计量;
(4)评测输出。系统对本次检测周期Ti进行计算,并与一般持续时间T(经验值)进行比较。并将疑似状态时磁场强度最大值与经验值Bmax进行比较。最后计算本此次检测的可信度,并且根据可信度输出结果。4种状态转换关系如图3所示。
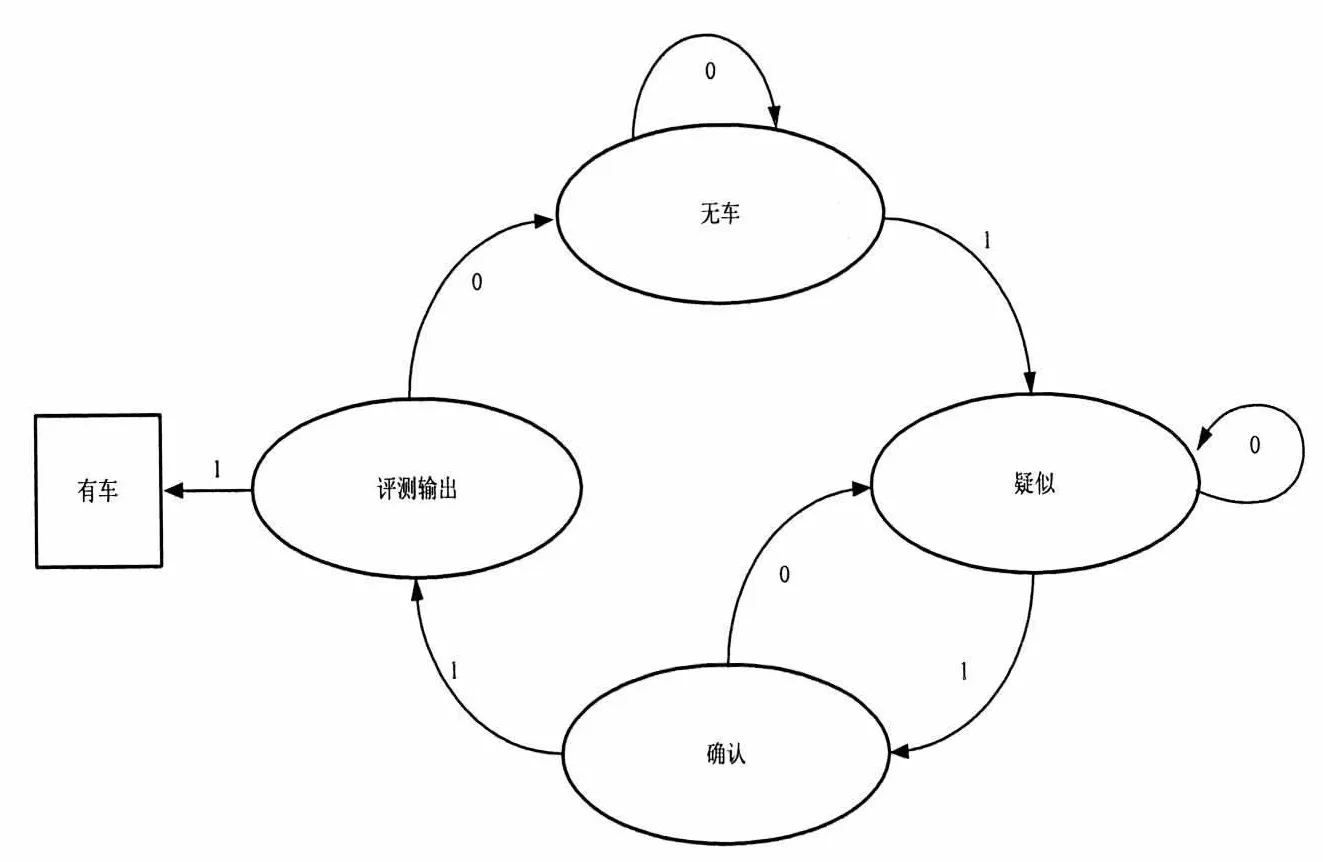
图3 检测过程状态转换关系
根据某次实验中车辆先后以5km/h、20km/h通过检测器时的总磁场强度曲线来确定算法检测车辆的动态过程,具体过程如图4所示。
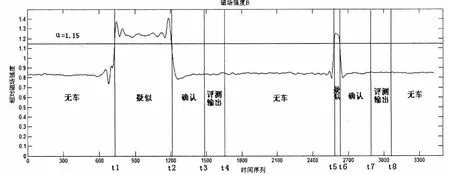
图4 多状态阀值自适应法动态判断过程
在本算法中,疑似阀值α是判断有车波形产生的关键,背景磁场的扰动会对其作用效果产生较大影响。因此α的取值不能固定不变,应是可以根据背景基值的变化而变化。结合实验数据及背景磁场变化缓慢这一特点,本设计确立了一种阀值自动更新的算法:假设现在为i时刻,当系统处于无车状态时,此刻的阀值α由i-1时刻的α以及平均背景磁场大小决定。当系统跳出无车状态,则α不进行更新,与上一时刻等值,此做法可以排除车辆磁场对阀值的干扰。具体计算公式如下:

式中,k为遗忘因子,本实验中取0.6。x(i)为无车状态下的磁场强度,i大于等于2。
3 实验结果
实验中速度从5km/h和40km/h,随机抽取500组进行测试。检测的速度非常快并且该算法始终表现出较高精度,准确率为98%。说明该算法的实时性非常强,精确度非常高。
4 结束语
针对实际道路车辆行驶情况,通过车辆的磁感应曲线判断车辆状态是一种检测车辆的有效方法。本文提出了多状态阀值自适应法主要通过比较总磁场强度的大小来进行检测,是一种基于预值的判断。此算法计算量小,对CPU运算能力要求较低,可进行实时的道路信息输出。本算法只适用于确定车辆从检测器正上方通过的情况,且只能单一地对车辆有无进行判断,不能获取其他更多交通信息。因此在接下来的研究中要寻求更加全面的检测方法。
[1]Roe H.The Use of Microwave in Europe to Detect,Classify and Communicate with Vehicles[J].roceedings of the IEEE,1991,30(10):1 143 -1 145.
[2]史元超.基于信息传感器的交通状态获取技术的研究[D].北京:北京交通大学,2009.
[3]H Kim,Lee J,Kim S,etal.Ultrasonic Vehicle Detector for Side-Fire Implementation and Extensive Results Including Harsh Conditions[J].Proceedings of the IEEE,2001,23(2):127 -128.
[4]王捷,艾红.热释电红外传感器应用与车流量检测系统[C].北京:北京信息科技大学自动化学院,2009∶72-73.
[5]欧珊瑚,王倩丽,朱哲瑜.Visual C++.NET数字图像技术与应用[M].北京:清华大学出版社,2003∶333-387.
