基于LED光源的直升机旋翼频闪成像系统的研究
2013-09-03甄海涛陈庆文
甄海涛,费 磊,陈庆文
(黑龙江省科学院自动化所,哈尔滨 150090)
直升机的旋翼是为直升机飞行产生升力和操纵力的核心部件,直升机一般装有四片桨叶,桨叶靠飞机产生的扭矩进行旋转,并且通过对桨叶的角度进行调节,来控制直升机的起飞与降落。直升机的飞行性能、驾驶品质、震动、噪音水平、寿命等问题都依赖于对直升机旋翼稳定性的掌握。直升机的更新换代也是以旋翼的重大改进为标准的,因此世界各国都把直升机的旋翼技术当作直升机的关键技术来研制,并且不断地提高对旋翼的测试手段和方法,以使旋翼的设计达到性能最优。
直升机旋翼锥度是旋翼动平衡测量中一个重要的指标,它的测量是在旋翼高速运转的状态下进行的,所以过去一直存在着测量精度差,难度大等多种问题,但随着近年来光电技术、电子技术的发展,对旋翼共锥度的测量已经能做到利用多种方法进行快速、简单、有效的测量。
近年来,旋翼锥体测量设备多采用的是汞灯光源频闪成像的方法。其工作原理是:选用专用的频闪灯,测量前,在直升机旋翼各片桨叶尖部安装具有一定尺寸、不同形状的反光性能标靶;在测量时,获取转速信号,同时触发专用频闪灯,使频闪灯闪亮时间与叶桨转速同步,从而用目测的方法确定不同桨叶的相互位置。
通过对现有汞灯光源的直升机旋翼频闪测试仪进行研究分析,笔者提出了一种新型的基于大功率LED光源的直升机动平衡旋翼频闪测试仪。该系统主要利用大功率LED光源代替汞灯光源,并结合ARM嵌入式系统、光电传感器等新型电子元器件,使其具有体积小、寿命长、价格低廉等多种特点。
1 直升机旋翼测试频闪原理
直升机旋翼椎体测量的方法主要是靠频闪成像的原理进行测量,高速运动的物体在人的眼前飞过时所留下的图像,因为视觉信号的关系,会短暂的停留1/20s,那么如果一个物体在每隔1/20s内出现一次,我们人眼就会认为其一直存在,现在我们所使用的照明灯管也是这个原理,那么当我们用一闪一闪的光连续照在一个运动物体上时,只要光的连续时间在1/20s以内,我们就会看到该物体静止的图像,这样我们通过多次快速的频闪,就会看到多个运动物体的清晰图像[1]。
直升机一共有4片桨叶,每片桨叶的叶尖位置都挂有一个直径2cm的不锈钢铁片,分别有4种图形:三角、方块、菱形以及圆形,叶桨在高速运转的时候,每当每片叶桨运行到机身右侧90°固定位置时,我们将频闪仪所发出的光源利用光学系统控制为一条光柱打向靶标,如图1所示。
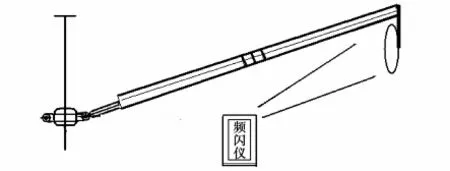
图1 频闪打靶标Fig.1 Strobscopic shooting target
叶桨下方的4个图形,分别有自己相应固定位置,我们利用光电传感器获取直升机旋翼转速信号,并通过ARM系统控制光频闪仪进行频闪,使频闪频率与直升机旋翼转速频率相同步,我们就会观察到以下效果。如图2、图3所示。

图2 频率与图形速率同步Fig.2 Synchronism of freqnency with round speed rate
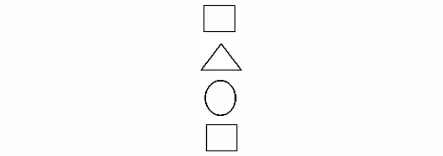
图3 实际显示效果Fig.3 Actual showing effect
工作人员根据图形位置的距离,根据经验来确定旋翼的相互位置,对其进行改正,为进行下一步动平衡实验提供可靠数据。
2 旋翼测试系统的整体设计
系统由光电转速传感器、ARM控制系统、LED频闪光源组成。光电转速传感器主要实现对直升机旋翼转速的速率采集,将电压信号传给ARM系统,ARM控制系统完成A/D转化并将根据转速进行脉冲输出,对LED频闪系统进行控制,使其能够与直升机旋翼转速相对应,实现频闪成像效果。系统的总体结构如图4所示。
本频闪仪的研制主要是通过对我国现用进口动平衡频闪测试仪进行研究分析,利用光电转速传感器获取直升机旋翼转速信号,将信号发送给ARM系统进行A/D转换,ARM系统通过脉冲输出控制电源开关,从而控制LED频闪的频率及频闪响应时间,使频闪能够与叶桨靶标的图形频率相同步,最后选择合理的光学凸透镜进行聚光,使反射回来的光源能够在人眼接受范围内,并达到最好效果。从而替代进口汞灯光源的频闪测试仪对直升机的旋翼锥体进行检测,实现直升机动平衡测试仪的部分国产化。该系统主要改进优点如下:
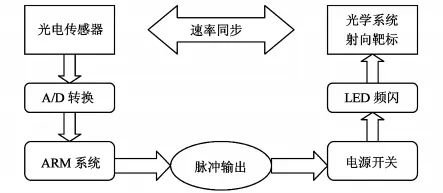
图4 系统结构设计Fig.4 System structure clesign
1 )通过对频闪光源的频闪特点的掌握,选择合适的大功率LED灯作为频闪源,使其能够对高速运动的物体进行频闪成像,并可以降低成本提高频闪仪寿命。
2 )选取最新型的霍尔光电传感器,使其能够更加准确地获取直升机旋翼转速。
3 )设计出一套针对于直升机旋翼频闪检测的ARM2440系统,使其在接收转速信号,转换脉冲输出信号时更加稳定可靠。
4 )搭建特有的光学系统,使频闪光源能够准确射向靶标,并且反射光源在人眼可接受范围内,并达到最好效果。
3 硬件设计与实现
本系统使用ARM系列芯片进行硬件系统的搭建,它有体积小、成本低廉、便于携带等特点。采用光电传感器,对直升机旋翼的转速进行采集,并经过计算后在将转速频率变成所需要的脉冲信号对LED频闪光源进行控制,使其能够与叶桨图案同步,完成锥体测试功能。
3.1 LED控制电路设计
作为直升机旋翼测试用的频闪光源是一种特殊光源。因为频闪光源是对直升机旋翼转速进行测试,所以对频闪光源的发光频率、闪光的持续时间都有着较高的要求。为达到频闪所要求的响应时间,设计 LED响应电路如图5[2]。
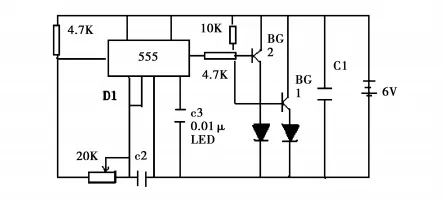
图5 大功率LED驱动电路图Fig.5 High power LED drive circuit
设计LED控制电路,我们主要选用了555时基电路,它主要有一个555多谐振荡器构成的信号发生器,1个功率放大器,还有1个大功率LED构成。此电路中的震荡频率可以根据频闪的具体需求进行调整,通过信号发生器产生输出脉冲频率,并且由功率放大器放大脉冲信号,控制大功率LED发光。并且我们可以变换信号发生器的震荡频率,来改变LED发光的响应时间,从而达到频闪要求。
3.2 基于光电传感器A/D转换设计
本系统主要利用霍尔光电传感器对直升机旋翼转速进行测量,将所得到的模拟电压信号传输到下位机ARM嵌入式系统中,并经过A/D转化后,进行数字脉冲输出对频闪LED进行控制,使其能够完成频闪成像,基于嵌入式ARM系统我们主要采用了TLC2543芯片做该A/D转换芯片,该系统的硬件A/D转换电路设计如图6[3]:
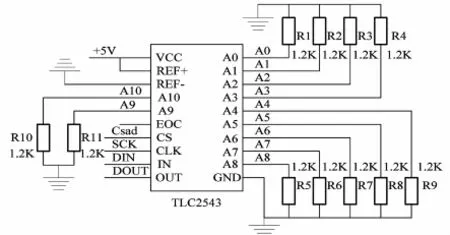
图6 A/D转换电路连接图Fig.6 Connection of A/D switch circuit
4 软件实现
首先将TLC2543进行程序初始化,上电后设置转换通道和转换频率ADCCON,将相应的中断挂起寄存器,设置中断入口程序,取消MASK屏蔽,进行设置ADCCON相应的位启动转换、中断服务程序。通过SUB判断ADC转换状态,清除SUB相应的位,读取转换值 ADCDAT[4]。
主要程序及流程图(见图7)如下:
void ADCInit()
{
int channel=0,preScaler=50000000/ADCFRE -1;
rADCCON=(channel< <3)|(preScaler< <6)|(1<<14);//设置ADC通道和预分频值 Delay(100);
pISR_ADC=(U32)ADCHandle;//设置中断向量表
ClearPending(BIT_ADC);//清挂起寄存器
rSUBSRCPND&=(1<<10);//清子中断挂起寄存器
EnableIrq(BIT_ADC);//使能ADC中断,实际是关闭INTMSK对ADC的屏蔽 rINTSUBMSK&=(0<<10);//关闭子中断对ADC_S的屏蔽
rADCCON|=1;//开始转换
}
static void__irq ADCHandle()
{
int ADCValue;
ClearPending(BIT_ADC);
if(rSUBSRCPND&(1<<10))//判断是不是有ADC普通转换产生的中断
{
rSUBSRCPND&=(1<<10);
ADCValue=(rADCDAT0&0x3FF);//读取转换值
Uart_Printf(" ADCconvert value is%d ",ADCValue);
rADCCON|=1;//开始转换
}
}
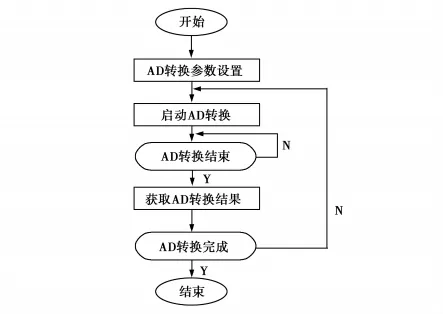
图7 A/D转换程序流程图Fig.7 A/D switch flowchart
5 结束语
LED作为频闪光源,在测量高转速物体的时候,测试范围可以达到400~20 000r/min,完全可以用作直升机旋翼的频闪测试光源。同时我们采用ARM2440芯片研发出下位机系统,使频闪效果更加稳定、准确。该套系统已经在哈飞进行了初步试验,取得了较好效果,相信不久随着技术的完善及改进,该系统定可以取代国外进口功能相似的汞灯旋翼频闪仪,使我国直升机旋翼检测技术的相关仪器实现部分国产化,为我国的航天事业添砖加瓦。
[1]姚凯,阮新波,王蓓蓓,等.第四代新光源——发光二极管[J].电源世界,2008,(3):58 -61.
[2]杨清德,康娅.LED及其工程应用[M].北京:人民邮电出版社,2007:125 -175.
[3][美]加西奥.微控制器技术及应用[K]//嵌入式技术与应用丛书,2009,4(1).
[4]王黎明.ARM9嵌入式系统开发与实践[M].北京:航空航天大学出版社,2008:196-236.