高速铁路隧道衬砌裂缝自动化检测硬件系统研究
2013-09-02王华夏漆泰岳
王华夏,漆泰岳,王 睿
(西南交通大学交通隧道工程教育部重点实验室,成都 610031)
高速铁路隧道衬砌裂缝自动化检测硬件系统研究
王华夏,漆泰岳,王 睿
(西南交通大学交通隧道工程教育部重点实验室,成都 610031)
衬砌裂缝是最常见的隧道病害。由于高速铁路列车运行速度较快,衬砌裂缝造成衬砌混凝土掉块会对高速铁路运行造成极大安全隐患。目前国内衬砌裂缝检测还停留在以人工检测为主的阶段,而基于图像处理的检测系统,已经广泛应用于桥梁、公路等工程中,但是由于隧道自身的特殊性,检测系统的发展较为缓慢。在结合高速铁路隧道自身特点基础上,提出一套隧道裂缝自动化检测系统,并对系统工作原理进行阐释,在此基础上对系统内部各项硬件设备进行选型,最后在实验室内完成组装和调试,基本达到了预期的效果。
铁路隧道;隧道衬砌,裂缝,自动检测,图像采集
近些年来国内建设了大量的高速铁路,高速铁路对线路平直性要求较高,在穿越山岭地带时,基本是以桥梁和隧道的形式通过的,桥梁和隧道占整个线路的比例很高,部分甚至超过了90%。
隧道衬砌由于各种内外因素综合作用造成裂缝病害出现,包括混凝土收缩和外部荷载引起的裂缝。此外,高速铁路中列车高速运行引发的空气动力学效应会加剧衬砌结构裂缝的开展,裂缝会降低混凝土结构物的承载能力、耐久性及防水性。如果衬砌裂缝导致衬砌混凝土发生掉快,则会在很大程度上威胁高速铁路运行的安全。日本高速铁路就曾出现隧道衬砌掉块导致列车脱轨的严重事故,因此,需要周期性地对衬砌裂缝进行检测和修复。伴随着大量高速铁路隧道的建设和投入运营,未来相当长一段时间内,我国都将面临着大量隧道需要定期进行维护、检修的现状。然而,我国高速铁路的快速发展也暴露了配套设施建设滞后的问题,隧道检测方面的技术和设备较为落后,无法满足快速发展的隧道建设的要求。
高速铁路隧道具有允许检测时间很短的特点,隧道检测若只利用铁路线路开天窗这一段很短的时间开展工作,使用人工或人工仪器检测很难完成任务。尤其是在我国目前修建了一批长大隧道,依靠人工更加无法在要求的时间内完成检测。另外,高速铁路运行具有速度快的特殊性,列车驶入隧道后会产生巨大的空气压力和负压效应,若检修人员不及时撤离,会严重威胁检测人员生命安全。
国外一些发达国家如德国、日本等在裂缝衬砌检测方面,比国内的技术要成熟和先进,除了以上的国内的2种方法,主要是取自动化的检测方法。本文利用图像采集与处理技术实现对衬砌裂缝的自动检测。首先对隧道衬砌进行自动图像采集,CCD照相机扫描就是一种常见的图像自动采集方式。通过图像采集卡即可将CCD相机的视频信号采集到计算机的内存中,实时显示、存储和处理。利用计算机编制软件,对采集到的海量图像数据进行处理,包括裂缝的识别、提取、计算。
通过本项目的研究,提出一套系统的裂缝图像采集、图像处理、裂缝尺寸测量以及安全性评定标准,为未来几年内高速铁路隧道的快速检测提供可靠的方法,在保持高速铁路的安全及顺利运营方面,具有重要的意义。
1 自动化检测系统总体方案设计
车载隧道衬砌裂缝检测法就如同电视录像,利用以CCD相机为核心部件的图像采集系统对隧道断面进行连续的信息采集,将光信号转变为电信号,然后经过A/D信号转换,再次将电信号转变为计算机可以识别的数字图像信息,输入计算机并存盘,然后再经过图像处理系统,提取出衬砌裂缝信息,如裂缝的范围,具体位置以及裂缝的走向、宽度等,最后对裂缝危害作出评价,对下一步的监测以及防治提出指导性意见。系统的工作原理如图1所示。
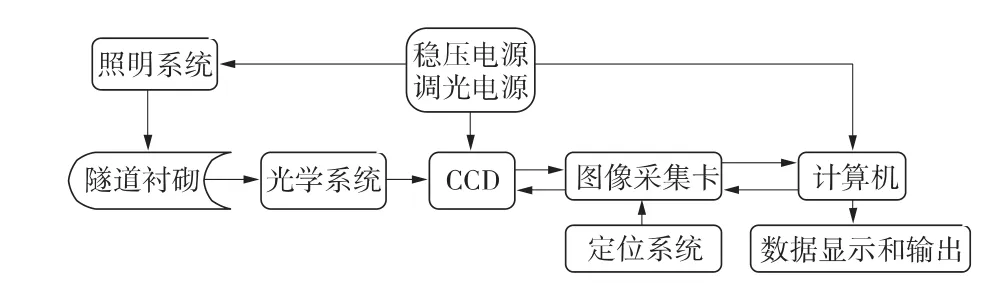
图1 系统工作原理
高速铁路隧道裂缝自动化检测系统首先需要完成的工作是对外部数据的采集、传输和存档。外部数据主要是指采集到的衬砌裂缝图像信息、图像位置信息和速度传感器产生的脉冲信号。其中最重要,也是与最终实现对衬砌裂缝进行自动化检测最重要的数据是衬砌裂缝的图像。裂缝图像的自动检测技术主要基于工业领域机器视觉检测原理[11],利用高效率的相机对隧道衬砌裂缝图像进行快速采集,代替效率低下的人工检测。采集到的衬砌图像通过在计算机上编制的软件进行处理,进而实现对裂缝的识别、提取和测量,并且利用编制的自动化判别系统对裂缝危害进行评估,从而实现从图像采集、图像识别到危险评估的一整套自动检测方案。检测系统因需要在高速铁路隧道内运行,故需要安装在有轨检测车上,实际应用中可在高速铁路轨道上运行。其硬件组成如图2所示。根据图2所示的自动化检测系统示意图对实验室试验阶段的试验装置进行设计,并在实验室中对设备进行组装、调试和优化。

图2 系统硬件组成
2 自动化检测系统硬件选型
检测系统硬件的主要构成包括以下设备:有轨检测车、CCD相机、光学系统(镜头)、图像采集卡、电源、照明系统、定位系统(包括转速传感器与红外传感器)等。整个系统集成安装在有轨检测车上,以便后期在高速铁路轨道上进行检测工作。系统拥有高性能的图像采集系统和图像处理系统,以便保证系统在高速运行的状态下采集高精度的隧道衬砌图像,后期进行图像处理分析时,能够依据采集到的裂缝图像提取到各种裂缝的特征参数,并根据特征参数对隧道安全状况进行评估。
2.1 CCD相机及镜头选型
在隧道裂缝图像采集过程中,相机镜头与隧道衬砌处于高速相对运动之中;另一方面,裂缝自动检测又要求相机拍摄到高清晰高分辨率的图像。这两方面的原因就给图像采集带来了很大困难。
电荷耦合器件(CCD)的功能是把二维光学图像信号转变成一维以时间为自变量的视频输出信号。CCD可分为两大类:线阵CCD和面阵CCD,两者都利用CCD将光学信号转换成电信号,实现图像的采集。由于线阵传感相机直接将接收到的一维光信号转换成时序的电信号,即获得一维的图像信号。若想用线阵CCD获得二维图像信号,必须使线阵CCD与二维图像做相对扫描运动[7]。
图像采集部分的核心是CCD相机,它的工作程序是当列车驶入隧道后,相机开始进行隧道衬砌信息的采集,再将所采集的信息进行储存,使之成为可以进一步处理的信息。从结构上可以将CCD分为线阵CCD和面阵CCD两种。线阵相机是通过被摄物体的移动,利用单行像素的图像传感器(一维)来建立二维图像。相对于面阵图像的获取,线阵图像在获取高分辨率的图像时成本低、动态范围大、光敏感度高,而且允许被扫描物体的移动速度较快。线阵CCD因只有1排感光器件,故相对面阵CCD简单,成本自然相对较低。线阵CCD可以拥有数量巨大的单排感光单元,在测量范围一定的前提下,其测量精度比面阵CCD高很多,从而能够满足裂缝检测的高精度要求。并且线阵CCD实时传输光电变换信号和自扫描速度快、频率响应高,能够实现动态采集,并能在低照度下工作[4]。在衬砌裂缝自动化采集系统中,若检测车以30 km/h的速度行驶,则每秒钟行进的距离约为8.33 m,在这种工作条件下面阵CCD采集到的图像会产生模糊、拖影等严重影响图像质量的情况,这就给下一步的图像自动识别造成难以克服的影响,也不利于提高检测的精确度。由于面阵CCD相机自身工作原理的局限性,使其不适于对动态目标连续无遗漏地高精度捕捉[4]。线阵CCD每次只采集1行图像,而且线阵CCD的工作频率可以达到几十MHz,采集到图像就不会因检测车的高速运动对图像质量产生影响。另外,线阵CCD相机是对隧道衬砌进行连续扫描拍摄,可以在隧道纵向形成连续的图像,避免了图像重合和拼接的问题。
对于隧道衬砌裂缝图像自动采集系统,线阵CCD相机采集隧道衬砌表面图像进而获得衬砌裂缝信息,而由于衬砌表面颜色和纹理都较为单一,不需要使用彩色CCD,黑白CCD完全能够满足检测需要。另外相同价位的黑白CCD和彩色CCD相机相比,彩色CCD相机的分辨率及灵敏度都较低,黑白CCD相机更能满足图像后期处理的高精度要求,且相对于彩色图像,黑白图像所占用的存储空间更小,处理速度更快,尤其是对于检测整条隧道,系统需要处理海量数据的情况下,黑白CCD相机的速度优势更加明显。
由于采集系统是进行动态采集的,在车辆行驶的情况下要满足检测衬砌裂缝≥0.2 mm的裂缝,同时还要在高速铁路隧道停止运营的允许时间(开天窗)内完成检测。该系统选择的线阵摄像机应该能同时满足以上两个条件,即裂缝的限值(精度要求)和时间限值。
由于本系统中采用线阵CCD相机,检测车运行方向与隧道纵向一致,线阵CCD垂直于检测车运行方向布置,因此只需要考虑竖向点数即可。假设拍摄范围的高度为2 m,由于系统要求能够达到的精度为能识别0.2 mm以上的裂缝,因此计算线阵CCD的分辨率至少要达到2/0.000 2=10 000才能满足检测要求。
对于时间要求,以石太客运专线太行山隧道为例,隧道长度约为27.87 km,若检测时间限制在120 min(T),隧道的长度为 L,则列车速度 v≥L/T=13.94 km/h,即3.87 m/s。线阵相机拍摄一次横向宽度范围按最大精度计算,即0.2 mm,则线阵相机若每秒钟连续拍摄,需拍摄3.87/0.000 2=19 350次,即要求相机频率大于19 350 Hz。考虑到在同样硬件条件下,相机的精度越高相应的频率越低,因此,同时满足高精度和高速度条件对相机要求较高,可考虑在满足精度的前提下,降低图像采集速度,一条隧道可以分多次采集。
根据以上各方面的要求,本车载系统选择的线阵CCD照相机为DALSA公司的Piranha3高分辨线阵相机。Piranha3系列利用DALSA最新的IT-Px传感器,其具有最优灵敏度,是DALSA公司目前可用的最大分辨率和最大输出量的线扫描CCD相机。表1是相机的特性。
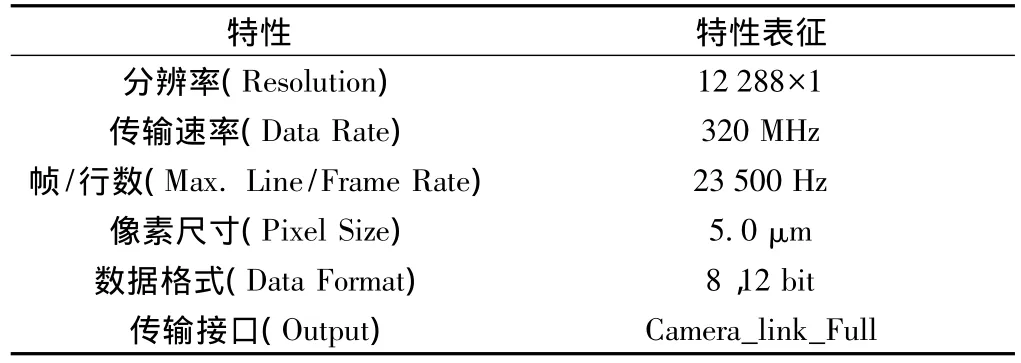
表1 Piranha3线阵CCD的特性
图像采集系统中另外一个重要组成部分是相机镜头,镜头是机器视觉系统的窗口,因此其对裂缝图像采集起着关键性的作用。要选择合适的镜头保证光学系统成像清晰,做到透光性强、杂散光少,像面照度分布均匀,足够的相对孔径,图像几何畸变小。由于本系统中采用的线阵CCD光敏区域较长,故应选用视场较大的物镜。综合以上要求,本检测系统选用Myutron公司生产的 FV8528W-P2型镜头,该镜头为固定焦距85 mm,工作距离0.46~∞,适合长距离及大视野拍摄。这款镜头可以很好地满足相机的使用要求,达到系统采集隧道裂缝图像的要求。
2.2 图像采集卡选型
图像采集卡(Framegrabber)是控制相机拍摄,将CCD获取的图像信号进行采集和数字化后传输到电脑中,以数据文件的形式保存在硬盘上的硬件设备。隧道裂缝图像自动检测系统在扫描整个隧道衬砌的图像信息时,所获取的图像数据量非常大,而且这些海量的数据要求在一定的时间内采集完毕并传送到计算机内对裂缝图像进行处理和分析,因此需要较快的速度保证图像采集的工作顺利完成。图像采集卡是连接图像采集和图像处理部分的桥梁,图像采集卡将CCD获取的图像信号经过AD转换,转换成电脑能够识别、处理的数字信号,将海量数据通过PCI总线直接传输到电脑中,减轻了CPU的工作压力,留给CPU更多的时间对裂缝图像进行识别、提取和处理。
选择图像采集卡一般要遵循以下几个原则。
(1)图像采集卡的接口制式一定要与所选相机一致,否则导致系统无法工作。
(2)相机的数据率不能超过图像采集卡的数据率,公式如下

其中,Data Rate(Grabber)为采集卡的数据率;Data Rate(Camera)为相机的数据率;R为相机的分辨率;f为相机的帧频;d为相机的数字深度。
(3)PCI总线的传输速率和采集卡缓存的大小要能够满足传输大量隧道衬砌图像数据的要求。
(4)隧道检测车在运行时,应根据检测车的运行速度向采集卡发出采集图像的信号,所以必须保证发出的控制信号和外触发信号采集卡可以接受,要根据具体情况选择支持控制信号的合适采集卡。
(5)图像采集卡需要专门的软件来支持硬件的工作,选择图像采集卡同时要考虑支持软件的功能,考虑视觉系统的易用性。
根据上述对线阵相机选型的特性分析,采用与相机对应的DALSA公司的Xcelera-CL PX4 Full图像采集卡。各项参数见表2。

表2 Xcelera-CL PX4 Full参数规格
2.3 照明系统
由于检测车是以一定的速度对隧道衬砌图像进行采集,而隧道内亮度较低,且衬砌表面材料一般为混凝土,颜色较暗,因此可能造成检测系统在采集图像时通过镜头进入的光线不足,导致采集到的图像亮度不够,达不到后续进行图像处理的要求,从而给裂缝图像识别、提取和分析带来困难。因此,考虑在检测系统中加入照明设备,以保证获取的图片质量。此外,照明系统的光强、方位和均匀性等的变化对相机获取衬砌裂缝的灵敏度与分辨能力影响也非常大,所以要选择合适的光源和打光技巧。
在机器视觉系统中常用的辅助照明光源有卤素灯、荧光、激光、LED等。以上几种光源拥有各自的优缺点,需要根据隧道衬砌裂缝自动化检测的特定情况进行选择。卤素灯价格昂贵,并且使用中耗损严重,寿命较短,使用时需要定期更换以保证亮度达标;荧光灯的亮度差、稳定性不高,尤其不适合应用在亮度较低的隧道检测上。LED具有单色性好、寿命长、稳定性及均匀性好和亮度便于调节等特点,通过组合多个LED可以得到合适的照明条件。因此,本系统采用组合LED光源作为裂缝自动采集系统的辅助照明光源。通过固定支架在相机两侧分别固定2个长条形LED光源,使光线与照相机镜头方向平行,使得照相机拍摄范围能够获得足够的亮度。
2.4 定位系统
定位系统是高速铁路隧道衬砌检测系统必须重视的一个子系统,是整个系统可行性的基础。
本系统中的裂缝采集系统是安装在可以高速运行的检测车上的,检测车在隧道内高速行驶配合图像采集系统完成对隧道裂缝图像的采集。线阵CCD相机每触发一次采集到一行图像,通过检测车在隧道内连续运行扫描得到二维衬砌图像,而检测车的运行速度不可能精确地保持恒定,如果不对检测车运行速度加以监控,线阵CCD得到的隧道衬砌图像就无法完整获取整个隧道的图像信息。使用速度传感器可以协调相机采集隧道衬砌图像数据的频率与检测车行驶速度。通过脉冲信号的输出,进而触发线阵CCD实时采集每行图像,使得检测车的运行速度与线阵CCD的扫描频率保持同步。本系统采用美国先进的霍尔元件来拾取转速信号,记录仪接收到转速信号就开始正常工作。这种速度传感器采用优良的材质和独特的防护结构,使它具有很高的安全性能而且能保持足够的精度。这种速度传感器的工作原理是对车轮旋转脉冲进行计数,通过测得的脉冲频求得系统的行进速度。理论的测速公式为

式中 D——机车轮径;m;
f——传感器输出脉冲频率,Hz;
N——车轮转一周脉冲传感器所发出的脉冲个数。
此外,为了进一步提高隧道裂缝检测系统的自动化程度,需要设计一个自动判别系统开始和结束工作的子系统。当检测车进入隧道后系统开始工作,当检测车离开隧道后系统关闭,停止图像采集。本系统采用红外线距离传感器来完成这一工作,可在检测车两侧安装垂直于检测车行进方向的红外线距离传感器,当红外线测距仪检测到车辆与周围物体间距离发生突变且小于某个数值,就可认为检测车已经驶入隧道,向系统发出指令开始图像采集工作,同理,在检测车离开隧道时也可以实现自动关闭系统,停止采集工作。通过这种方法实现了检测系统的自动化开启和关闭。
2.5 移动检测车
检测车不仅是检测人员活动的场所,检测人员需要长时间在检测车内完成工作,同时检测车也是整个衬砌裂缝检测系统的载体。检测车的整体刚度、布局以及减振性能等都会直接影响图像采集的精度。考虑到后期实际应用于高速铁路隧道,检测车必须能够在铁路轨道上运行。
考虑到机车应用的外挂要求和相机拍摄的精度要求等方面的因素,需要在检测车上给相机设计一个固定支架。固定支架的设计主要考虑以下几个因素:(1)照相机必须安装在车辆合适的位置,以便达到所要求的拍摄范围以及拍摄精度,因此相机与LED光源安装在可在一定范围内调节的伸缩机构上。另外,相机相互之间的角度也应可以调节,使得相机之间采集到图像有搭接的部分。(2)不仅检测车自身要采取减振措施,支架同样需要采取一定的减振措施,车身与支架之间安装阻尼减振器,消除车身振动、变形等对图像采集造成的影响,保证检测车在高速行驶的情况下拍摄图像的质量。(3)因为线阵CCD相机及镜头是比较精密的仪器,需要在相机镜头前部安装防护罩,在工作时防护罩自动开启,防护罩在系统不工作时关闭,以保护图像采集设备安全。(4)整个结构应具有良好刚性,且具有较强的耐蚀性,保证检测系统长时间在隧道恶劣环境下工作的安全稳定。
3 系统功能测试及存在问题
在实验室内,对上文所述硬件进行组装和调试。使用混凝土砌块模拟隧道衬砌,检验各个子系统的实际性能,包括最佳的照明效果,线阵相机采集到图像的精度,分析在不同扫描速度下采集图像的分辨率,最终得到现有条件下图像采集的极限速度。分析检测精度的各种影响因子,并针对各影响因素提出解决办法,最大限度地提高采集图像的质量。对系统进一步改进和优化,不断提升图像识别速度,实现裂缝图像数据的高速识别和采集。技术路线如图3所示。
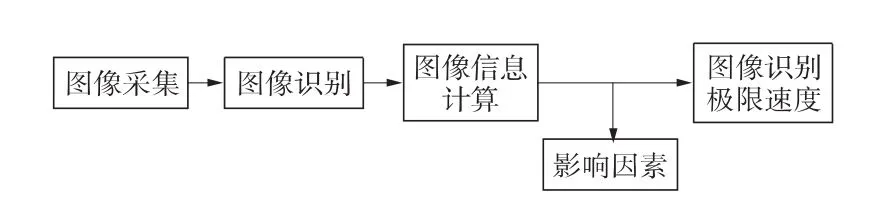
图3 技术路线
试验过程中存在的主要问题如下。
(1)检测系统采集图像的精度和范围不能完全达到理想的效果。这主要是由于现有硬件设备条件的限制。因现有线阵CCD的感光单元有限,若测量精度能够达到理想的0.2 mm,则拍摄到的图像范围较小,在实际高速铁路隧道工程中,需要多台相机同时进行作业,不经济的同时给图像拼接带来困难。这需要后期采用精度更高的线阵相机来解决这一问题。另外,检测车车身在运行过程中产生的振动、倾斜都会造成图像精度降低,速度越快造成的影响越大,需要进一步加强检测车的减振措施来消除影响。
(2)图像采集的极限速度需要进一步提高。实验中,一方面检测车移动速度越快,采集到的图像质量随之降低;另一方面,图像的高速采集还涉及到海量数据的传输、处理和保存的问题,速度越快对硬件系统的要求越高。对于图像采集、识别的极限速度有待进一步研究加以提高。
(3)定位系统的累积误差问题。定位系统作为图像采集的核心控件,对采集图像的完整性和准确性有很大影响,但是在长距离的运行过程中不可避免地产生累积误差,需要研究加以消除。
(4)本文试验中,自动化检测系统主要是CCD相机对裂缝图像的采集,只从表面裂缝情况对隧道的安全状况进行评价较为片面。在下一步的研究中,自动化检测系统应当集成地质雷达等设备对隧道衬砌背后空洞、漏水状况进行全方位的检测,有利于隧道安全状况的全面评估。
4 结语
在总结了国内外隧道检测技术现状的基础上,结合我国高速铁路快速发展的现实情况,提出了基于CCD图像采集的隧道自动化检测方案。依据隧道衬砌裂缝检测的特点,对自动检测系统的总体方案和工作原理进行了阐述。针对此自动化检测系统,考虑到系统工作特点,对系统的硬件设备选型依据进行了详细的介绍,包括线阵CCD相机、镜头、图像采集卡、照明系统、定位系统、检测车等重要硬件设备。最终,通过在实验室中对本系统的各项性能进行调试,初步达到了自动化检测的目标。通过自动化检测系统为我国高速铁路隧道衬砌裂缝的检测提供一种全新而高效的方法,对于实际应用中可能出现的某些不足,有待在后续研究和实际应用中加以改进和完善。
[1] Seung-Nam Yu,Jae-Ho Jang,Chang-Soo Han.Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel[J].Automation in Construction,2007(16):255-261.
[2] 侯建斌,夏永旭.公路隧道的养护及病害防治[J].公路交通科技,2004(3):6-9.
[3] 刘晓瑞,谢雄耀.基于图像处理的隧道表面裂缝快速检测技术研究[J].地下空间与工程学报,2009,5(S2):1624-1628.
[4] 狄彩云.基于车载线阵CCD相机的路面数据获取与处理研究[D].北京:首都师范大学,2007.
[5] 柴聚奎.隧道裂缝病害检测方法[J].工程技术与产业经济,2010(7):16.
[6] 曲来超.基于车载测量系统的激光扫描仪检校研究与应用[D].河南:河南理工大学,2009.
[7] 廖广军,胡跃明,戚其丰,等.全自动上芯机的晶片检测系统[J].计算机工程与应用,2006(4):102-104.
[8] 李鹏.基于图像处理的隧道检测[D].北京:北京交通大学,2009.
[9] 张辉,杨建礼.隧道裂缝分析与防治措施[J].山西建筑,2007,33(12):300-301.
[10] Sunil K.Sinha,Paul W.Fieguth.Automated detection of cracks in buried concrete pipe images, Automation in Construction,2006(15):58-72.
[11]王平让,黄宏伟,薛亚东.隧道衬砌裂缝自动检测性能影响因素模型试验研究[J].岩石力学与工程学报,2012,31:1705-1714.
[12]罗鑫.公路隧道健康状态诊断方法及系统的研究[D].上海:同济大学,2007.
[13]张为.车载式地铁隧道断面扫描检测系统研究[D].上海:同济大学,2009.
[14]刘小光.沥青高速公路路面检测与破损率识别技术研究及系统实现[D].长春:吉林大学,2006.
[15]孙朝云,沙爱民,谢荣昌.路面裂缝无损检测图像采集系统设计[J].交通信息与安全,2006,27(5):106-109.
[16]刘玉臣.公路路面裂缝图像自动识别技术研究[D].长春:吉林大学,2005.
Research on Hardware System for Automatic Detection of Tunnel Lining Crack on High-Speed Railway
WANG Hua-xia,QI Tai-yue,WANG-Rui
(MOE Key Laboratory of Transportation Tunnel Engineering,Southwest Jiaotong University,Chengdu 610031,China)
Lining crack is one of the most common diseases of the tunnel.Because the train runs very fast on high-speed railway,the concrete debris-falling due to tunnel lining cracking may cause serious safety hazard on the operation of high-speed railway.At present in China,however,it is manual inspection that dominates the inspection of tunnel lining crack,while the detection system based on image processing has been widely used in bridges,roads and other projects;but because of the particularity of the tunnel,the development of detection system used for tunnel is relatively slow.In this paper,by combining with the characteristics of high-speed railway tunnel itself,a set of automatic detection system used for detecting the tunnel lining cracks was put forward,and the working principle of this system was analyzed.On this basis,the models of various hardware devices in relation to this automatic detection system were selected.Finally,the assembling and debugging for this system were all completed in laboratory,and the expected result has been basically achieved.
railway tunnel;tunnel lining;crack;automatic detection;image acquisition
U238;U45
A
1004-2954(2013)10-0097-05
2013-03-11;
2013-04-13
国家自然科学基金资助项目(51278423);中央高校基本科研业务费专项资金项目(SWJTU11ZT33)
王华夏(1989—),男,硕士研究生,E-mail:lemonshou@yahoo.cn。