220kV变电站带电作业机器人的研制
2013-08-23鲁守银王振利赵玉良
李 健,鲁守银,王振利,赵玉良
LI Jian,LU Shou-yin,WANG Zhen-li,ZHAO Yu-liang
(国网山东省电力公司电力科学研究院 山东鲁能智能技术有限公司,济南 250002)
0 引言
带电作业是电力设备测试、检修和改造的重要手段,它为提高供电可靠性、减少停电损失和保证电网安全做出了巨大贡献。带电作业对操作人员的技术水平和熟练程度、气候条件及安全防护用具等要求非常严格。由于担心安全隐患及缺乏合适的人身安全防护用具及带电作业技术培训不够等,部分地区对变电站带电作业内容进行了限制,致使变电站停电作业频繁,输、配电可靠性指标不能完成,从而给电力企业带来了很大的经济损失,给人民生活和生产带来了很大的不便。
目前大型变电站现场作业任务均操作人员使用原始工具手动完成,其存在着如下缺陷:
1)变电站设备由于置身户外,弥漫于空气中的工业污秽和自然污秽易沉积在设备表面形成污秽层,这些污秽物受雾、小雨等侵害,极易引发污闪事故。
2)操作人员手工带电完成设备套管清扫与清洗、设备RTV防污闪材料的喷涂等工作,劳动强度极大,效率低,自动化水平低。
3)人工带电作业安全防护、遮蔽要求非常严格,稍不注意就会出现短路电流,造成重大的安全事故,引发人身伤亡事故[1]。
220kV变电站带电作业机器人是山东电力科学研究院承担的国家高技术发展计划(863计划2012AA041506)科技攻关重点项目,旨在结合我国变电站带电作业需求,研制一台能够的满足变电站作业环境需求的带电作业智能机器人,能够完全代替人工完成变电站带电设备套管清扫与清洗、设备RTV防污闪材料的喷涂、带电绝缘子零值检测、隔离开关除锈防护带电作业任务,提高作业人员的操作安全性能。

图1 变电站带电作业机器人结构组成
1 高压带电作业机器人结构组成
变电站作业机器人主要由工作机和远程遥控指挥车两部分组成。工作机部分按功能主要分为工作装置、执行机构、平台总成和行走机构等组成。
整机主要性能参数:
1)整机质量(不包括机械臂):2000kg;
2)液压机械臂质量:60kg;
3)机器人平台装载质量:120kg;
4)机器人作业平台高度:4.5m;
5)整机作业幅度:3.5m;
6)行走速度:4km/h;
7)回转平台速度:8rpm;
8)最小转弯半径:750mm;
9)臂架最大角度:63°;
10)爬坡度:30%;
11)整机收起外廓状态 (长×宽×高):2700×1300×1500mm。
1.1 工作装置
工作装置由回转平台、三节绝缘臂和机器人作业平台组成。回转平台通过回转支承与底盘连接,在回转马达驱动下,实现平台及其附属各部件360度连续回转运动。三节绝缘臂安装于回转平台上,分为大臂、连接臂、前臂,其中大臂铰接到回转平台上,连接臂铰接于大臂上,前臂铰接于连接臂上。机器人作业平台铰接到前臂上,能够自动调平。在回转平台上还设有状态显示屏,用于伺服阀、关节限位、油位、油压和电源等状态指示。
1.2 执行机构
执行机构主要由六自由度主从操作液压机械臂夹持专用作业工具完成。主从操作液压机械臂是高压带电作业机器人的核心。现场作业时,操控主手与机械臂间仅通过光纤通讯,这样操作人员操控主手控制机械臂接触高压设备,隔离高压电场对作业人员造成的人身伤害,这也是高压带电抢修作业机器人最为突出的优点。
液压机械臂整个系统主要由机械臂、操控主手、液压伺服控制单元、主手控制器、液压供油单元和外部电源组成[2],如图2所示。

图2 液压机械臂系统组成
1.3 平台总成
平台总成主要由发动机、液压泵、控制阀、回转支承及接头、液压油箱、燃油箱、电器部件和配重等组成[3]。
设定工作机的行走速度为4km/h,履带驱动轮半径200mm,据选择的减速马达参数计算,需马达转速为55r/min。
行走马达总流量为:

设定行走时系统压力为12MPa时,泵的输入功率(即驱动功率)为:

根据以上要求综合考虑,选择日本原装洋马4TNV88-SYY发动机。
1.4 行走机构
行走机构采用履带式移动底盘结构,主要由底盘、履带架、左右行走马达、驱动轮、承重轮、履带、张紧缓冲装置以及两侧的四个液压支腿组成。左、右行走马达、左侧支腿液压缸Ⅰ和Ⅱ、右侧支腿液压缸Ⅰ和Ⅱ均通过下部电磁换向阀A组与液压泵连接。控制手柄通过下部电磁换向阀A组驱动左、右行走马达,当两条履带运行速度相同时,机器人实现前进或后退运动,当两条履带速度不同时,机器人实现转向运动。
履带式行走机构牵引系数由滚动摩擦系数、爬坡度系数、滑移转向系数、加速系数等因素决定,综合考虑设定牵引系数i=0.8,则:

其中,r为履带轮半径,取200mm。
行走马达排量为:

其中,Tg为单个马达驱动扭矩,η为机械效率,取0.9, P为马达压差,取16MPa。
2 电气控制系统
变电站带电作业机器人电气控制系统包括四部分:液压机械臂、工作机移动及升降机构、高空摄像机和带电作业工具,其中液压机械臂由液压伺服控制器进行控制,工作机移动及升降机构、高空摄像机、带电作业工具由总线控制装置进行控制,如图3所示。该机器人控制系统全部通过无线进行信号传递,保证了作业人员与高压电场完全隔离。

图3 变电站带电作业机器人电气控制示意图
变电站带电作业机器人电气控制系统由一台工控机和一套PLC系统组成。工控机采用工业级计算机构成功能强大的人机交互系统,通过操控主手远程无线遥控机械臂夹持专用设备或工具完成变电站带电作业任务。PLC选用欧姆龙CP1H,触摸屏上有3位选择开关,分别为手动控制、自动控制、远程控制。选择远程控制时,伺服阀由主手控制。在自动控制时伺服阀受PLC逻辑程序控制,在手动控制时伺服阀由操作人员直接触摸屏来控制,如图4所示。
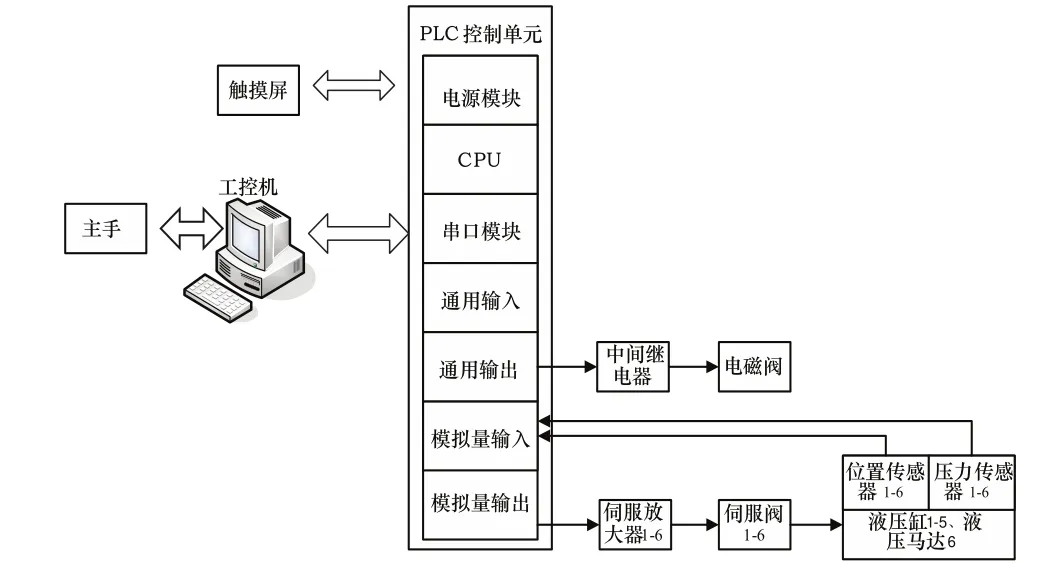
图4 变电站带电作业机器人硬件连接示意图
3 液压控制系统
液压系统采用五路进口节流换向阀+手动控制+遥控,操纵举升机构;两路进口比例换向阀遥控前进后退转弯;四路进口节流换向阀遥控支腿伸缩;七路液压伺服阀控制液压机械臂各关节运动。液压锁、单双向平衡阀直接固定在油缸上,使其工作更安全可靠。
如图5所示,液压油从油箱通过吸油滤油器进入机械臂液压控制油路,再经回油滤油器流回油箱。下部电磁换向阀A组主要控制机器人前、后两侧支腿伸缩运动和工作机移动平台行走运动,通过中央转换接头、分配阀与液压泵连接;上装电磁换向阀B组主要控制大臂、连接臂、前臂俯仰和机器人作业平台调平以及回转平台运动,经上装控制切换器、分配阀与液压泵连接;机械臂液压伺服阀C组主要控制六自由度液压机械臂的腰部回转油缸、大臂俯仰油缸、小臂俯仰油缸、腕部俯仰油缸、腕部摆动油缸、手爪开合和腕部旋转马达等运动,通过上装控制切换器、分配阀与液压泵连接。中央转换接头是连接回转平台与底盘油路的液压元件,它保证回转平台旋转任意角度后,行走马达还能正常配油。
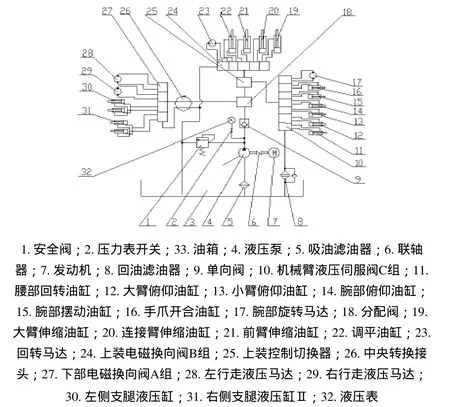
图5 变电站带电作业机器人液压控制示意图
4 绝缘防护系统
机器人进行作业对象是带电的电力设备,动作稍有不慎有可能使机器人“机毁人亡”,还有可能给电网带来灾难性的故障,所以采取有效的绝缘措施,保证机器人的绝缘强度是机器人能否进行作业的首要条件。
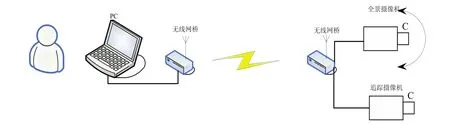
图6 带电作业机器人视频监控系统示意图
从操作人员作业安全角度考虑,采用多级立体组合绝缘策略实现系统的绝缘防护,主要包括主体绝缘和辅助绝缘两部分。主体绝缘主要由变电站带电作业机器人对地绝缘、操作人员的人身绝缘安全、设备及线路相间绝缘组成;辅助绝缘主要由遮蔽工具绝缘防护和系统配套设备布置绝缘组成。在抗电磁干扰上,采用有效的电磁兼容技术,增加机器人系统抗电磁干扰的能力。
1)变电站带电作业机器人对地绝缘装置,主要借助三节绝缘臂作为升降机构,确保机器人系统对地绝缘。各节绝缘臂对应的驱动油缸均采用绝缘油缸。
2)操作人员的人身绝缘安全装置,主要采用远程遥控指挥车远程遥控完成作业,与高压设备电场完全隔离。操控主手安装在远程遥控指挥车控制工作台上操作机械臂运动。操控主手与机械臂是同构的,采用液压伺服驱动,机械臂可以完全跟随操控主手来运动。
3)设备及线路相间绝缘装置,主要包括机械臂的绝缘护套和机器人绝缘作业平台。机械臂通过支承绝缘子安装于机器人绝缘作业平台底架上面,采用专用橡胶绝缘护套,起到遮蔽或隔离的保护作用,防止发生相间短路;机器人绝缘作业平台为硬铝合金焊接而成,裸露型材表面均用环氧玻璃布缠绕,底架采用环氧绝缘板外包,防止平台作业时接触两相高压导线造成短路。
5 通讯及监控系统
工作机和远程遥控指挥车之间全部控制系统通过无线进行信号传递,保证了作业人员与高压电场完全隔离。操作者借助摄像机回传的视频信息,通过监控完成目标物的类型识别、姿态分析、操作决策。立体摄像机可以在图像中获取水平方向360度的环境信息,利用全方位视觉的这个特点,立体摄像机负责对作业平台、机械臂、工具系统、高压设备等全方位实时的监控。当机器人作业平台到达作业位置时,通过追踪摄像机进行更精确的定位,如图6所示。各个摄像机通过数据采集系统转换成数字信号,通过光纤传输到控制室内,经过工控机处理,获取场景的视觉信息。在安全区域内,操作者坐在驾驶室内,通过图像显示屏实时观察机械臂作业姿态,采用主从控制式操控主手远程无线遥控机械臂夹持专用工具接触高压设备或线路带电作业。
6 结论
根据变电站220kV带电作业工艺和作业环境需要,设计一种新型变电站带电作业机器人。该机器人装置从操作人员作业安全角度考虑,从而利用机器人代替人工完成变电站带电作业任务,操作人员位于安全区域内,避免直接接触高压设备,极大提高了操作人员带电作业安全性能,并对我国变电站作业方式产生积极变革作用。
[1]上海市电力公司组.10kV架空配电线路带电作业指导书[M].北京:中国电力出版社,2007.
[2]GRIPS Manipulator System Manual 003-5005-00 Rev6.
[3]吴宗泽主编.机械设计实用手册(第二版)[M].北京:化学工业出版社,2008.
