矿山井筒视觉监测与故障智能识别系统设计*
2013-08-22邢远秀
邢远秀
(1.冶金工业过程系统科学湖北省重点实验室;2.武汉大学计算机学院)
矿山井筒设施的主要检查内容包括钢结构、给排水管线、通风管道及通讯设施的故障检查,井壁是否渗水检查,动力设备运行故障检查等,目前的检查定位和检修质量验收等工作主要依靠人工站在罐笼顶部来完成[1]。由于井筒内工作条件比较恶劣,需要防止渗水、罐笼晃动和抛落重物的袭击,停工检查则降低了企业的生产效率。
随着嵌入式和图像处理等技术的不断成熟,使得通过网络平台,分散在各个点的运行设备能够进行数据传输,从而进行视频监控成为可能。国内外针对于井筒安全检测主要有基于传感器的井壁监测系统[2-3],基于视频技术的井筒设施监测系统[4-6]和井筒场景监测系统[7-9],此类监控系统大多采用有线传输,虽然能够替代人工下井进行场景及设备监测,但是设备位置固定使得监测对象固定和设备不能共享,采集视频完全由人工进行判别。
随后章启忠等人提出的矿山井筒安全隐患监测系统[1]将井筒设施的工作及生产状况的实时图像信息自动采集、地面显示、存储并进行管理。本研究在此基础上进一步降低系统成本,提高系统的防护性能,并实现对前端采集的视频图像进行特征提取、对比、匹配,自动识别故障点并定位。
1 系统组成
本系统由前端视频数据采集子系统、无线传输子系统、地面图像显示控制子系统和视频处理子系统4部分构成。前端视频数据采集子系统把井筒内的情况采集成视频,并进行编码、录像存储;同时通过无线传输送到地面图像显示控制子系统终端进行解码显示;视频处理子系统除用户管理、视频导入、视频查看、视频管理和日志管理等基本功能之外,包括故障点智能监测与定位。系统架构框图如图1所示。
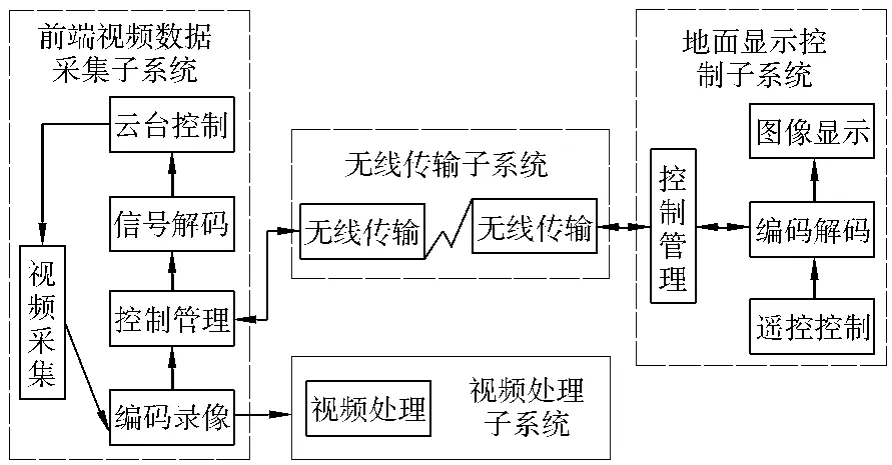
图1 系统架构框图
本系统的无线传输子系统主要由前端无线信号接收装置和无线视频发送装置,地面无线信号发送装置和无线视频接收装置2大部分组成。其中前端无线信号接收装置和无线视频发送装置嵌入在前端视频采集子系统中,地面无线信号发送装置和无线视频接收装置嵌入到地面遥控子系统中。
2 视频采集与同步显示
2.1 视频采集装置
前端视频数据采集子系统为便携式视频采集装置,主要用来采集现场原始的视频数据,在采集过程中将视频实时存储,采集完成后供工作人员仔细观察井筒设施实时的现状以及数据备份。并同时将视频通过无线传输到地面装置,方便地面工作人员了解监测区域和视频采集装置的运行状况。系统原理如图2所示。
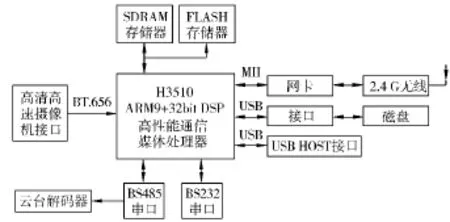
图2 前端视频数据采集子系统原理
视频采集装置的箱体上部固定了1台可以360°旋转的高速高清摄像机,实现井筒监测无死角,同时装置2个高照度的光源,保证在井筒黑暗的环境中能获得清晰的视频。
视频采集箱体内部包括视频编码和存储模块、无线指令模块、无线视频模块、电源模块、智能控制模块等多个功能模块。采用双硬盘存储技术,实时将视频数字化、编码和存储。无线命令信号接收装置接收地面遥控设备发来的命令,精确控制云台旋转的角度和摄像机的焦距和光圈。无线视频信号发射装置将视频信号编码发送到地面显示设备,方便工作人员实时监测及选取监测的井筒方位。底部强力吸铁伸缩装置可以快捷方便地将箱体牢牢固定在罐笼顶部。
在进行现场监测之前,由工作人员将该装置推到井筒罐笼顶部调整好位置,启动强力吸铁装置固定箱体。该装置安装、使用和维护简单和方便。在井筒监测完毕之后,采集到的原始视频数据已经保存在图像采集装置中的硬盘阵列中,可以由工作人员通过USB接口导出,提交给视频处理子系统。
2.2 视频采集装置的工作模式
章启忠等人提出的矿山井筒安全隐患监测系统[1]的视频采集装置为人工控制模式,地面图像显示及控制装置根据用户需要控制采集装置云台的方位及摄像头的焦距。但是由于人工操作的随意性,采集的视频图像的尺度和检测方位不固定,使得后继视频处理子系统的故障智能判别处理受到限制。
为了提高系统的智能化,本系统的视频采集装置包含人工控制模式和智能控制模式2种工作模式。人工控制模式下的视频采集方式和矿山井筒安全隐患监测系统的工作方式相同,可以由监控人员根据实际情况控制云台的方向和摄像机的焦距。在智能控制模式下,则监控人员不能对视频采集装置进行人为控制,采集装置固定对井筒各个方位依次进行监测,所采集到的视频图像为故障智能识别提供了基础数据。
2.4 地面显示及遥控装置
地面显示遥控装置原理如图3所示。该装置由电池、1个小型显示屏、1个小键盘和操纵杆、无线命令信号发射装置以及视频信号接收装置和解码器6个部分构成。当按下接收设备开关,装置启动后屏幕上实时显示前端图像采集设备的摄像头视角场景图像。人工控制模式下,工作人员可以通过小键盘和操作杆随时、精确控制云台的旋转,使摄像机对准井筒中需要特定监测的设施,还可以调节摄像机的焦距和光圈。在智能模式下,小键盘的控制键和操作杆的功能则被屏蔽。
视频采集装置随井筒罐笼上下运动过程中,地面遥控装置的视频信号接收模块通过无线接收前端采集的视频信号,并由解码器对视频进行解码并显示。工作人员可以通过地面接收设备的显示屏实时观察到摄像机采集的场景图像。

图3 地面遥控装置原理
3 关键技术
3.1 箱体防护技术
本系统的前端视频采集装置工作时置于井筒罐笼上方,井筒内工作环境恶劣,设备既要求防水,又需要防重物撞击。
视频采集装置使用一个标准铸铝防水密封箱把各个功能模块密封起来,起到防水、防撞击的作用。密封箱遵循IEC60670,CEI23-24,IEC60529标准,防护等级达到了IP66级别。同时装置具有高抗冲击、抗振动性能,抗冲击等级达到IK10级别。采集装置具有良好的抗化学腐蚀性能,可工作在零下40~125℃温度范围的环境中。装置中的摄像机采用半球形摄像机,透明球罩采用3.5 mm左右厚度聚碳酸酯(PC)工程塑料和铸铝外壳。外置光源加装铝合金护罩,使得设备具有更好的防水性、耐腐蚀性、恒温性和抗冲击能力,以适应矿井复杂的环境。
3.2 抗多径干扰技术
由于井筒内环境比较复杂,布线比较困难,所以无线传输方式成为了首选方式。而前端视频采集装置和地面显示及遥控装置在进行远距离通信,传输大量的视频图像信息和控制命令信息,需要解决抗多径干扰问题。
本系统采用最先进的COFDM(coded orthogonal frequency division multiplexing)调制技术、信道编解码技术、差错控制技术,使得设备能够在高速移动环境下实现视频、语音、数据等宽带多业务的实时、同步传输。COFDM技术应用到矿山井筒无线传输中来,提高信号在多径下抗衰落能力和频率利用率,为高速数据传输打下基础。同时采用自适应混合ARQ/FEC的差错控制技术,限定重传的次数,以满足实时的要求。基于编码器端简单的反馈信息,统计跟踪无线信道误码率,并对无线信道环境进行预测,自适应地优化冗余信息的大小,以达到无线视频通信系统在抗差错能力和传输效率之间的最优折衷。
3.3 故障智能判别技术
井筒检测完毕后,由监控人员将保存在前端硬盘中的视频数据通过USB接口导出,按照罐笼号、检测方位、检测时间、检测人员等信息导入数据库中,提交给视频处理子系统,实现用户管理、视频导入、视频查看、视频管理和日志记录和故障点的自动判别等功能。
对于智能模式下采集的视频图像,首先对故障的颜色模型和形状模型进行预定义,通过对视频中邻近帧进行相关性分析,对提取的多种特征进行综合判断,最后做与故障相似物体的误判断分析,实现通过对不同时间、同一方位的井筒视频图像的特征值提取、比较,进行智能判读,自动发现、定位井筒某一区域的故障点。具体判别步骤如下。
(1)故障的颜色模型的定义。颜色是故障的重要特征之一。首先选择一系列有代表性的矿井故障图片,获取足够多的不同故障区域中的像素点,以这些点的颜色值作为故障颜色空间的采样样本。将样本数据做成表格,在判断某个像素点是否为故障时,计算表格中每个样本点与待判别像素点之间在颜色空间中的三维距离,统计距离小于一定阈值的样本点的个数,若个数较多,可认为该像素点属于故障区域。
(2)故障的形状模型的定义。基于颜色分割后得到的故障的区域,可以计算出故障的形状特征,例如故障的位置、面积、半径、方向、重心、圆形度、层次结构等等。考虑到矿井故障的实际情况,只选择那些相对稳定的形状特征。位置由包围故障像素点的矩形框确定,故障面积可由故障像素点的总数表示,故障轮廓可由故障区域边缘的边界链码给出,而表示物体形状复杂程度的圆形度可定义为故障轮廓周长的平方与故障面积的比值。即使在图像或视频质量较差的情况下,这些特征值仍然能够大致描述故障的形状。
(3)视频中邻近帧图片的相关性分析。通过对视频中邻近帧图片的相关性分析,得到故障信息的变化趋势与运动特征。以初始帧为参考图像,依次计算后继帧与参考帧之间的差别,如果差别超过预定的阈值,则将当前帧之前的系列图像作为一个片段,并从当前帧开始计算另一个新的片段。把视频分割成为众多片段后,再根据片段之间的关联性进行聚类操作,从而得到若干有意义的场景。
(4)与故障相似物体的误判断分析。经过多特征综合判断后,仍然会有个别误判现象。考虑到这种情况非常少,系统将为这样的个例单独建立一个样本数据库,库中的样本将突出个例与待识别对象之间的细微差别,例如除了颜色与形状外的纹理特征。对于所有被判断为故障的区域,与个例样本数据库进行比较,以进一步判断是故障还是其他相似物,可以减少误判,提高故障识别的准确率。
4 结论
本系统将嵌入式技术与现代化视频图像处理技术相结合应用到井筒监测中,研发了一套对矿山井筒设施及生产状况进行安全监测的智能系统,替代了传统的人工检查。前端视频采集装置实时采集、存储及管理图像视频信息,并通过无线网络传输到地面接收装置进行实时监测,方便用户查看每次监测的视频图像,并通过对视频数据深加工,进而实现智能识别、定位故障点等功能。该系统操作方便、技术先进,可为矿山井筒安全生产、故障监测提供全方面的有力保障。
[1] 章启忠,等.矿山井筒安全隐患监测系统设计与实现[J].金属矿山,2009(6):130-131.
[2] Gibiec M.Prediction of machines health with application of an intelligent approach-a mining machinery case study[J].Key Engineering Materials,2005,293/294:661-668.
[3] 李 辉,郝建军,何秋生.光纤传感器技术在矿井安全监测中的应用[J].煤矿安全,2006(4):37-40.
[4] 罗水余,曾小舟,申秋学.井眼彩色电视在盐井检测中的应用[J].物探与化探,2005(4):365-366.
[5] 张恩仑.井下摄像技术在套损井检测中的应用[J].河南石油,2002(4):41-42.
[6] 马海玉,玉王庭,孙 涛.云锡集团松矿竖井牵引系统视频监控的开发应用[J].矿业快报,2008(1):72-74.
[7] 刘艳兵.数字矿山视频监控及导航系统的设计与实现[D].北京:北京交通大学,2009.
[8] Todd M,Ruff,MS PE.Feasibility of using intelligent video for machine safety applications[C]∥2008 IEEE Industry Applications Society Annual Meeting[S.l.]:Institute of Aeronautical Sciences,2008:1-5.
[9] Beus M J,Ruest M.New technology for hoist conveyance monitoring and analysis[J].CIM Bulletin,2002,1065:78-83.