一种检测红外小目标的图像阈值分割算法
2013-08-18张书真
张书真
(吉首大学信息科学与工程学院,湖南吉首416000)
1 引言
在红外图像处理系统中,红外目标的分割是系统进行视觉分析和模式识别的基础。由于红外图像存在对比度低、噪声大、目标边缘模糊等特点,使得红外目标的分割具有较大困难。阈值法因其实现简单、性能稳定而成为图像分割中最基本的分割技术[1-3],其中基于熵的阈值方法[4-7]颇受关注。然而在基于熵的分割方法中,普遍存在两个问题:一是计算熵时存在无定义的情况;二是阈值的选取仅依赖于图像灰度直方图的概率信息,而没有直接考虑图像中目标和背景类内的灰度均匀性。文献[8]提出一种指数灰度熵的概念,能有效解决上述问题,但是整个算法由于涉及指数运算,计算较为复杂。另外,在红外目标检测中,红外图像的目标和背景之比通常比较小,要实现小目标的分割,直接使用阈值法很多情况下会出现目标分割的失败。为此,本文考虑结合目标区域和背景区域面积差值较大特点,构建阈值选取公式,并利用修正的灰度熵定义,得到一种新的阈值分割算法。实验证明该算法计算简单、能有效实现红外图像小目标的分割。
2 图像预处理
红外图像在生成、传输和编解码过程中通常会产生高斯噪声和脉冲噪声这类混合噪声,对红外图像进行目标分割前,首先通过预处理来去除这些混合噪声。为尽量消除去噪时带来的细节模糊问题,本文引入自适应中值滤波方法[9],并且为了减少参与中值滤波的像素数目,采用菱形邻域窗口进行滤波,滤波器窗口如图1(c)所示。

图1 常用滤波器窗口示意图
设像素点(x,y)的灰度值为 fxy,其邻域为 Sxy,邻域内灰度最大值为fmax、灰度中值为fmed、灰度最小值为fmin,邻域大小是自适应可变的,最大允许尺寸为Smax。自适应中值滤波分两个阶段进行,其伪代码如下:
step1:若 fmin<fmed<fmax,则转入 step2
否则增加Sxy的尺寸
若邻域尺寸Sxy≤Smax,则重复step1
否则输出fmed
step2:若 fmin<fxy<fmax,则输出 fxy
否则输出fmed
该自适应中值滤波的原理在于,当邻域内脉冲噪声密度很大时,将自动增加邻域窗口的尺寸,反之则不需要增加邻域窗口尺寸,而对于未被噪声污染的像素点则能保留其灰度值。因此通过滤波达到了去除脉冲噪声,平滑其他非脉冲噪声,减少图像细节失真的目的。
通过自适应中值滤波可以有效去除脉冲噪声,但是对于背景中的高斯噪声,去除效果并不理想,因此接下来再采用3×3十字型模板进行均值滤波,即模板为,采用该模板计算速度快,且可以尽量减少均值滤波带来的模糊问题。
为了验证上述预处理方法的去噪效果,以飞机红外图像为例进行了仿真实验。实验中分别采用传统3×3均值模板、传统3×3中值模板以及本文方法(其中自适应滤波器采用7×7菱形模板)进行滤波。实验结果如图2所示,从图中可以看出,经过本文方法预处理后的图像,在去噪效果上感觉更好些,且细节保护良好。从三种去噪方法输出的峰值信噪比PSNR来看,本文预处理方法的滤波去噪效果也是最好的。

图2 对含噪图像滤波的结果比较图
3 阈值分割算法
3.1 基于灰度熵的阈值分割
现有常用的阈值分割方法,仅用到直方图的概率分布信息,而没有直接反映图像中目标和背景内类灰度值的差异,为此本文考虑采用灰度熵进行分割。设一幅图像总的灰度级数目为L,图像中灰度为 k的像素数目为 g(k),k=0,1,…,L -1,用阈值 t将图像划分为目标类Co和背景类Cb,为讨论方便,设低灰度区为目标类,高灰度区为背景类,则可令:
图像灰度熵

其中,Ho(t)为目标类灰度熵;Hb(t)为背景类灰度熵。图像灰度熵表征了图像能量分布的宏观统计特征,反映了区域内像素灰度的差异程度。图像灰度熵越大,类内的像素灰度差异越小,当灰度熵达到最大时,目标类和背景类的灰度趋于均匀,此时对应的t就是最佳阈值。
3.2 修正阈值选取公式
由公式(1)和公式(2)可知,当Pk→0时,H(t)→∞,当Pk=0时,图像灰度熵将出现无定义的情况。文献[10]采用取倒数代替求对数的方法克服了Shannon熵出现的上述问题,且提高了计算熵的速度,为此本文采用类似的方法对灰度熵公式进行修正,令修正后的目标类灰度熵为:

则有:
同理可令背景类灰度熵为:
修正后图像总的灰度熵为:

另外,考虑到红外目标区域通常比背景区域要小很多,直接采用阈值分割很容易造成目标分割的失败,本文还将利用目标区域与背景区域面积相差很大的特点,来构建阈值选取公式。设目标区域面积为So(t),背景区域面积为Sb(t),则有:

最终的阈值选取函数为:

当η(t)取最大值时即为最佳阈值

3.3 优化搜索策略
在修正图像灰度熵公式中,用倒数代替对数运算可减少灰度熵的计算时间,在此基础上,考虑到探测红外小目标的图像大多灰度动态范围较小,为此提出一种阈值搜索的优化策略,使算法的计算复杂度进一步降低,搜索具体步骤如下:
第一步,将原直方图的坐标取值范围等分为n个区间,每个区间包含的灰度级数目为m个,即m=L/n,每个小区间记为 Φa,0≤a≤n -1。
第二步,将每个小区间由一个坐标点来代替,则原直方图取值范围缩小为n,而该直方图每一点的值表示对应小区间的频数,即有

第三步,在缩小的直方图上寻找到初始阈值t1,并由该点求得对应的原直方图小区间为Φt1,其坐标轴取值范围为t1m≤i≤(t1+1)m-1。
第四步,在Φt1区间上搜索,得到最终阈值t*。
利用上述优化搜索策略,可知搜索复杂度满足

当n=L1/2时,搜索复杂度最小,为 O(L1/2),可见采用优化搜索策略可进一步减少运算时间。
4 实验结果及分析
仿真实验是在AMD AthlonⅡX4 640、3.01GHz CPU和内存为3.25GB的微处理器上进行的,编程环境为Matlab7.9。实验对自行采集的红外图像数据集进行测试,为验证算法有效性,实验中分别采用Otsu法、最大熵法和本文算法对经过预处理后的红外图像进行分割。现取其中三幅图像加以说明,如图3(a)所示,原始红外图像中的目标分别为飞机、焰火和行人,图像中目标区域比背景区域小很多。从分割结果来看,Otsu法完全不能有效分割目标区域,最大熵法在目标和背景灰度差异较小时,分割不理想,如焰火的分割就出现了失败。总体看来,由于本文算法中灰度熵不仅考虑了直方图概率信息,还直接考虑到目标和背景内灰度分布的均匀性,且利用到目标和背景面积差值较大的特征,相对于最大熵法,本文算法在分割出目标的同时,能更好地抑制噪声。
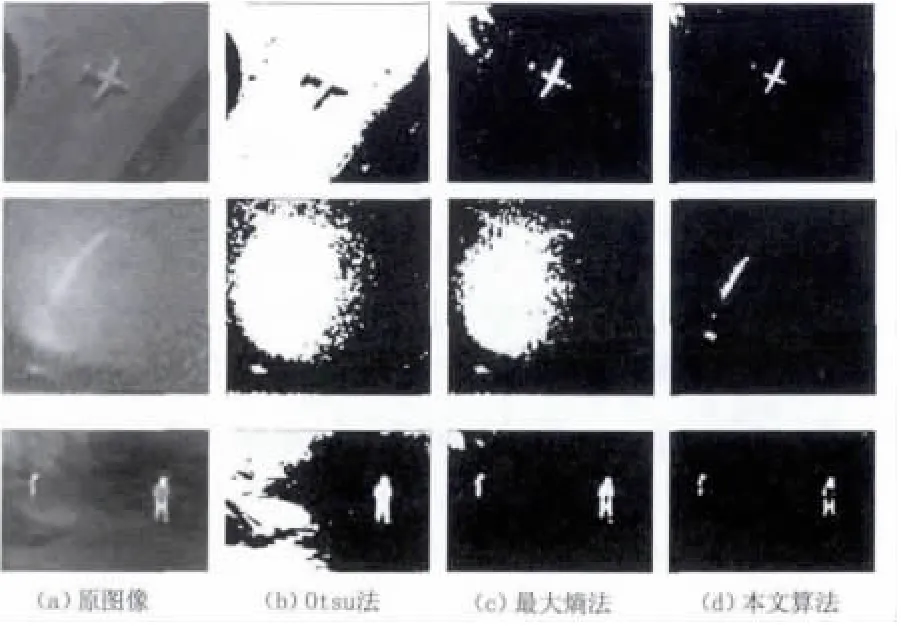
图3 红外目标分割结果比较图
表1给出了几种算法得到的阈值和运行时间的比较,从表中可以看出,与Otsu法和最大熵法相比,本文算法的运算速度提升明显,由于修正灰度熵中采用倒数代替对数运算的方法,且阈值搜索上采用优化策略,极大提高了阈值选取的计算速度,相对于Otsu法和最大熵法,本文算法所需时间至少减少了80%左右。
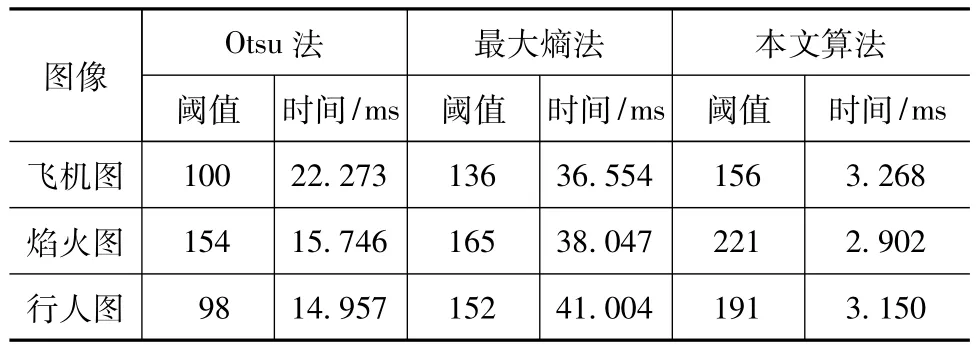
表1 不同算法获得的阈值以及运行时间比较
5 结论
本文提出一种基于目标与背景面积差值和修正灰度熵的图像阈值分割算法。由于考虑到目标与背景面积差较大的特征,所建立的阈值分割方法有利于图像中较小目标的检测,而修正灰度熵公式有效克服了熵计算中出现的无定义问题,能直接反映目标和背景类内像素分布的均匀性,且计算速度快。在阈值的搜索过程中,算法结合了优化搜索策略,使搜索复杂度由原来的O(L)降至O(L1/2)。大量实验结果表明,本文的算法抗噪性能良好,能快速有效地实现红外小目标的分割。
[1]Long Jianwu,Shen Xuanjing,Chen Haipeng.Interactive documentimagesthresholdingsegmentation algorithm based on image regions[J].Journal of Computer Research and Development.2012,49(7):1420 - 1431.(in Chinese)龙建武,申铉京,陈海鹏.基于图像区域的交互式文本图像阈值分割算法[J].计算机研究与发展,2012,49(7):1420-1431.
[2]Li Zuoyong,Liu Chuancai,Cheng Yong,et al.Statistical thresholding method for infrared images[J].Computer Science,2010,37(1):282 -286,298.(in Chinese)李佐勇,刘传才,程勇,等.红外图像统计阈值分割方法[J].计算机科学,2010,37(1):282 -286,298.
[3]Chen Zheng,Shi Yongpeng,Ji Shupeng.Improved image threshold segmentation algorithm based on Otsu method[J].Laser& Infrared,2012,42(5):584 -588.(in Chinese)陈峥,石勇鹏,吉书鹏.一种改进的Otsu图像阈值分割算法[J].激光与红外,2012,42(5):584 -588.
[4]Chang C I,Du Y,Wang J,et al.Survey and comparative analysis of entropy and relative entropy thresholding technique[J].IEEE Proceedings-Vision,Image,and Signal Processing,2006,153(6):837 -850.
[5]Ling Liuyi,Huang Yourui.Fast infrared image segmentation based on chaos ant colony algorithm[J].Laser& Infrared,2010,40(6):679 -682.(in Chinese)凌六一,黄友锐.基于混沌蚁群算法的快速红外图像分割[J].激光与红外,2010,40(6):679 -682.
[6]Fan Jiulun,Le Bo.Two-dimensional Cross-entropy lineartype threshold segmentation method for gray-level images[J].Chinese Journal of Electronics,2009,37(3):476 -480.(in Chinese)范九伦,雷博.灰度图像的二维交叉熵直线型阈值分割法[J].电子学报,2009,37(3):476 -480.
[7]Zhang Xinming,Xue Zhanao,Zhen Yanbin.Fast and precise two-dimensional Renyi entropy image thresholding[J].Pattern Recognition and Artificial Intelligence,2012,25(3):411 -418.(in Chinese)张新明,薛占熬,郑延斌.二维直方图准分的Renyi熵快速图像阈值分割[J].模式识别与人工智能,2012,25(3):411-418.
[8]Wu Shihua,Zhang Xiaojie,Wu Yiquan.Two-dimensional exponential gray entropy image thresholding based on decomposition [J].Chinese Journal of Stereology and Image Analysis,2010,15(4):351 -357.(in Chinese)吴诗婳,张晓杰,吴一全.基于分解的二维指数灰度熵图像阈值分割[J].中国体视学与图像分析,2010,15(4):351-357.
[9]Rafael C Gonzalez,Richard E Woods.Digital image processing[M].2nded.Beijing:Publishing House of Electronics Industry,2008.
[10] Wu Yiquan,Zhan Bichao.Thresholding based on reciprocal entropy and chaotic particle swarm optimization [J].Signal Processing,2010,26(7):1044 - 1049.(in Chinese)吴一全,占必超.基于混沌粒子群优化的倒数熵阈值选取方法[J].信号处理,2010,26(7):1044 -1049.
