快速反射镜关键技术研究
2013-08-17徐新行杨洪波高云国
徐新行,杨洪波,王 兵,高云国
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院大学,北京100049)
1 引言
快速反射镜(FSM)作为发射光源与接收端之间控制光束传播方向的精密光学仪器,集光、机、电技术于一身,具有响应快、精度高、分辨力大等突出优点,已被广泛应用于天文望远镜、激光通讯、图像稳定、自适应光学、高精度激光合束、复合轴精密跟踪等领域[1-5]。
长期以来,国内外关于FSM的研究就十分火热[6-8]。起初,主要立足于一些工程、基金项目如:美国马萨诸塞州技术研究所(MIT)为空间光通信实验研制了高带宽柔性轴式FSM[9-10];美国左手设计局(LHDC)与喷气推进实验室(JPL)合作设计了两轴柔性指向式FSM,用于补偿卫星姿态控制系统引起的抖动[11];美国国家天文台(NOAO)为麦哲轮巨型望远镜(GMT)的次镜研制了超大型拼接式FSM,它主要由7个独立的小型FSM组成,拼接直径达3.2 m[12-16]。近年来,中科院长春光机所在王兵研究员的带领下针对车载移动平台,设计了多种刚性承载式 FSM,主要用于精确控制光束的发射方向[17-21]。国防科学技术大学也在国家自然科学基金的资助下研制了两维独立柔性轴式FSM,并针对柔性铰链的结构形式、材料选择、刚度分析等展开了理论分析计算[22]。华中科技术大学近年来也开始有关于高性能FSM系统的研制成果见诸报端[23-25]。后来,随着 FSM 应用领域的进一步扩大,国内外一些公司经过多年的研究与积累,开始形成一些系列化产品,并逐渐将其推向市场。如,德国PI公司采用巧妙的柔性环结构实现两轴摆动,应用压电陶瓷驱动,生产了高精度、高响应速度的FSM系列产品,其小信号带宽在500~900 Hz之间[22]。美国 Ball Aerospace & technologies公司采用集中柔性弹片支撑,音圈电机驱动,生产了一系列大角度FSM产品,其转角范围可达30',环境适应性更加优异[22-23]。此外,中科院成都光电所早在20世纪90年代便开始在凌宁教授的带领下从事FSM的研制工作,目前已生产出58~140口径的系列化产品[26-31];哈尔滨芯明天公司也一直致力于高精度、高响应、压电陶瓷驱动柔性无轴式FSM的研制开发,经过多年的努力取得了不错的成果。所生产FSM在响应速度方面虽与国外还存在一定差距,但已呈现出取代进口产品的趋势。
柔性无轴式FSM作为国内外研究的重点,具有结构简单、无摩擦、响应快等优点,不足之处是承载能力十分有限[32-36]。鉴于此,国内外学者针对柔性支撑铰链做了大量的研究工作,设计出各式各样的柔性件,以期改善FSM的承载能力与环境适应性,也取得了良好的效果[22,37]。同时,一些新型支撑结构的 FSM 也开始见于文献报道[17-20,38],如刚性支撑式FSM从结构原理上保证了系统的承载能力与抗冲击、振动性能,使FSM开始向车载、机载、舰载等应用领域迈进[17-20,39-40]。
2 FSM的主要性能指标
FSM的主要性能指标包括:有效通光口径、转角范围、角分辨力、控制带宽和响应频率等[6,22,41]。其中,有效通光口径反映了FSM所能校正光束直径的范围,它决定了FSM工作镜体的大小,进而影响系统的负载惯量,最终限制FSM的响应频率。转角范围是指工作镜体所能转动的最大角度,从应用方面考虑,它必须能够覆盖FSM工作对象所需求的调节范围。但为了保证系统高的响应频率,FSM的转角范围往往比较小(多为分级)。因此,为了实现大的工作范围,FSM通常与大惯量的二维转台配合使用构成复合轴系统[3]。角分辨力是指FSM的工作镜体所能实现的最小转角,它与位置传感器的分辨力及FSM装置的加工装调精度有关;控制带宽是指FSM控制系统的频带宽度。带宽越高,对外界干扰的抑制能力越强。对于响应频率要求不高的系统,其控制带宽较窄,一般远低于结构件的固有频率。而对于响应频率要求较高的系统,其控制带宽应尽可能大。为了避免谐振的发生,在结构件设计过程中,应保证各阶谐振频率不落在FSM的控制带宽以内[22];响应频率是指FSM系统最终所能达到的响应速度,它直接影响着系统的跟踪能力,一般响应速度越快,跟踪精度也就越高。它与FSM的结构谐振频率,驱动器的响应速度及控制系统的带宽有关。图1为FSM的主要性能指标与各组成部分之间的关系图。

图1 FSM的性能指标与各组成部分之间关系图Fig.1 Correlations between FSM performances and constitute
3 FSM的分类
3.1 按支撑结构分类
根据支撑方式的不同,FSM主要分为:柔性无轴式结构、X-Y轴框架式和刚性支撑式3大类,这也是目前最为常用的分类方式。
柔性无轴式FSM的突出优点是:结构简单、无摩擦阻力矩,响应速度快。致命缺陷是:包括反射镜在内的载荷主要由柔性件支撑,在振动冲击等恶劣的环境中,镜体在期望运动的方向回转的同时,可能产生微量的轴向位移,从而降低FSM的工作精度,甚至失效。因此,这种结构形式的FSM对柔性件的要求较高,更适于小口径、轻量型的工作镜体。图2为MIT研制的高带宽FSM的结构爆炸视图。如图所示,该FSM的柔性件包括弹性片、弹性圈和弹性轴三部分,用于实现FSM运动部分与不动基座之间的连接。

图2 柔性无轴式FSM结构图Fig.2 FSM with Flexure support structure
X-Y框架式FSM的优势是:旋转中心稳定、结构刚度好、转角范围大、承载能力强。不足之处是轴系结构复杂、转动惯性大,且轴系精度对FSM工作精度有直接影响,不适于响应频率要求较高的领域使用。图3为美国专利中报道的X-Y框架式FSM的结构图。

图3 X-Y框架式FSM结构图Fig.1 FSM with X-Y frame structure
图4为中科院长春光机所研制的刚性球面副支撑式FSM的实物照片。该型FSM通过自制刚性球面副实现运动部分与不动部分连接,突出优点是:承载能力强、抗冲击振动性能优异。缺点是:摩擦阻力矩大,响应速度有限。为了保证该型FSM稳定的旋转中心,系统对自制球面副的加工、装调精度提出了极高的要求。

图4 刚性支撑式FSM实物照片Fig.4 FSM with rigidly support structure
3.2 按功能用途分类
根据FSM功能用途及系统中工作镜体的不同,可分为反射式和透射式两种。其中,反射式FSM的负载为平面反射镜,在工程实践中应用较多,主要用于校正光束的传播方向。而透射式FSM的负载为合束镜(对特定波长激光几乎全部透过,对另外特定波长的激光几乎全部反射),主要用于不同波段激光的精确合束与对准。图5为哈尔滨芯明天公司生产的大口径透射式FSM的实物照片。

图5 透射式FSM的实物照片Fig.5 Laser incorporate FSM
4 FSM的组成
FSM系统主要由支撑铰链、工作镜体、驱动元件、检测元件和控制系统等5部分组成。目前,国内外针对FSM的研究主要集中在以下6个方面:①刚性或柔性连接方式的设计;②高刚度支撑基座的优化设计;③工作镜体的轻量化设计;④高性能驱动器的设计与选择;⑤高分辨力、高测量精度检测元件的设计与选择;⑥稳定可靠的控制算法的设计。
4.1 支撑铰链
在FSM装置中,支撑铰链主要用于连接系统的运动部分与不动部分,其精度直接影响FSM的整体性能。目前研究较多的支撑铰链主要有柔性与刚性两种。
柔性铰链主要分为四周分散式、中心集中式及四周分散与中心集中相结合式三种。图6为德国PI公司研制的具有分布柔度的柔性环式支撑铰链,该铰链巧妙地实现了传统的两轴系、万向架功能,双轴行程可达±600 μrad 。图7为国防科技大学设计的中心集中柔度柔性铰链,该铰链可方便地实现两轴自由回转,各向刚度与切割曲线的形状有关[22]。图8为美国MIT设计的中心集中柔度与四周分散柔度相结合的柔性支撑铰链。其中心采用高弹性的金属杆实现、四周采用高柔性橡胶实现,大幅度增加了柔性铰链的支撑能力[9]。图9为中科院长春光机所研制的刚性支撑铰链。其中图9(a)为四周分散式刚性支撑铰链,图9(b)为中心集中式刚性支撑铰链。该类铰链的承载能力大、环境适应性好,但摩擦阻力矩较大[18,20]。刚性支撑式FSM即采用此类铰链实现运动部分与不动部分之间的连接。




4.2 工作镜体
工作镜体作为FSM系统的主要负载与工作部件,根据功能用途的不同,可分为平面反射镜和合束镜两类。其中,平面反射镜主要用于校正光束的传播方向,而合束镜主要用于不同波段激光的精确合束与对准。
为了尽可能减轻FSM系统的负载惯量,提高系统的响应频率,需要对平面反射镜进行必要的轻量化设计。现阶段最常的轻量化途径有两种:一是采用比刚度高、导热性好、加工性能优异的轻质材料做镜坯,表1所列为常用反射镜材料的性能参数;二是采用先进的设计、分析手段对镜体进行的轻量化结构设计及参数选择[42-47]。目前常用的轻量化结构有背部开槽式、蜂窝式和拱形结构三种,如图10所示。
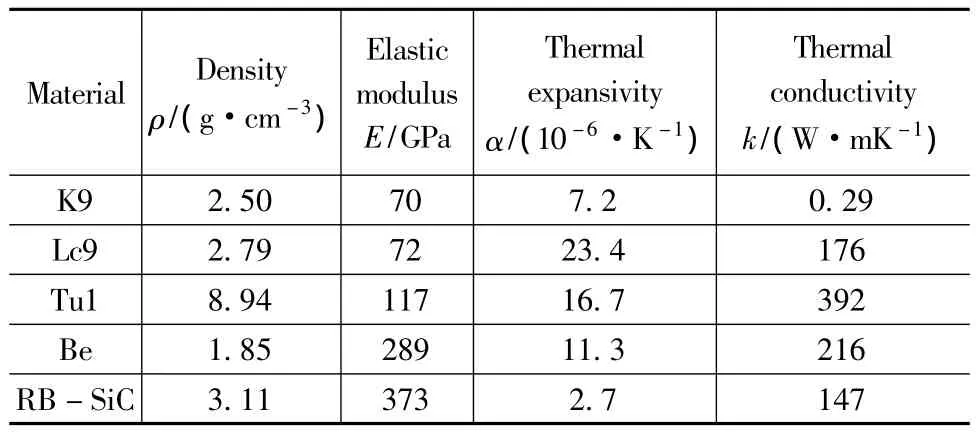
表1 常用反射镜材料的性能对比Tab.1 material performances and price of several familiar mirror
在有些FSM中,根据镜体的有效工作面,甚至直接将镜坯制成椭圆形以最大程度地减轻镜体质量,图11所示即为装有椭圆形镜体的FSM及其反射镜的轻量化结构。


4.3 驱动元件
由于FSM一般具有高精度、高分辨力、高响应频率等特点,因此,对驱动元件的精度、分辨力、响应速度等提出了极高的要求。目前,用于FSM的驱动元件主要有压电陶瓷和音圈电机两大类。
4.3.1 压电陶瓷驱动器
压电陶瓷具有驱动力大、分辨力高、响应速度快等优点,且能够与应变片组合实现自身伸缩长度的实时测量,顺应了FSM系统驱动传感一体化、小型化的发展趋势。然而,此种驱动器所需要的驱动电压较高,行程却只有几十微米,且抗冲击、振动能力极差[26-28,48]。多年来,国内外研究人员针对此问题做了大量的研究工作。一方面,通过巧妙的机械结构设计实现压电陶瓷行程的放大;另一方面,通过改变驱动器的使用方式,提高压电陶瓷的抗剪切、冲击能力。图12所示为两种压电陶瓷驱动器放大组件的实物照片。其中,“菱形”框架结构的设计不仅放大了驱动器的行程,而且改变了压电陶瓷的动力输出方向,增大了驱动器的环境适应性。

图12 压电陶瓷驱动器放大组件Fig.12 Magnify assembly of piezoelectric actuator
4.3.3 驱动器的排布方式
对单轴型FSM而言,至少需要一个直线驱动器实现反射镜的一维偏转,如图14(a)所示。此类FSM的优点是加工制作方便、生产成本低,但由于支撑铰链仅单侧受驱动力作用,因此系统的工作稳定性及环境适应性较差。为了提高单轴型FSM的工作可靠性与稳定性,使之适应复杂的工作环境,在工程应用领域常采用一对驱动器对称布置来实现平面反射镜的一维偏转,如图14(b)所示。由于这种FSM的受力状态较好,因此,对支撑铰链的磨损较小,且更容易实现较高的控制精度。

图14 单轴FSM驱动器的排布方式Fig.14 Actuator arrange styles of FSM with single axis
4.3.2 音圈电机驱动器
音圈电机自从问世以来,凭借其高精度、快响应、大行程等突出优点一直都倍受关注。一方面,它的驱动电压只有几伏到几十伏,但行程却是压电陶瓷的成百上千倍。另一方面,电机动子与定子之间存在必要的工作间隙,因此,在输出直线位移过程中,动子可以相对定子产生一定角度的偏转,并且不存在摩擦或碰撞[49-50]。音圈电机优异的环境适应性和强大的抗干扰性能,实现了它在工程领域的应用,甚至高冲击、高振动的车载平台系统中[18-20]。图13为几种音圈电机驱动器的实物照片。其中,图13(a)为直线式音圈电机,输出为直线位移。图13(b)为圆周式音圈电机,输出为圆周运动。这两种驱动器均可应用于FSM系统,其中直线式应用较多。此外,还有些科研单位针对实际FSM的空间要求,自行设计所需要的音圈电机,如图13(c)所示即为美国MIT研制的专用型音圈电机。

图13 音圈电机驱动器Fig.13 Voice coil actuator
对双轴型FSM而言,至少需要两个直线驱动器实现反射镜的二维偏转,如图15(a)所示。此类FSM的优点是结构简单、制造成本低,但支撑铰链在工作过程中的受力不均衡,系统的工作稳定性及可靠性较差,因此在工程应用中较少采用。目前,双轴型FSM较多地采用4个驱动器来实现反射镜的二维偏转,如图15(b)所示。这是因为采用2个驱动器通过推/拉来实现反射镜在每一维方向上的偏转,不仅受力状态好,FSM的工作稳定性、可靠性及环境适应性等得到明显改善,而且反射镜在两个方向上的运动不存在耦合,因此更容易实现系统的闭环控制。不足之处是:4个驱动器在机械结构上是超自由度的,因此对FSM装置的加工、装配精度提出了较高的要求。如图15(c)所示,采用3个直线驱动器均匀布置也能实现平面反射镜的二维偏转。这种FSM不仅节省了1个驱动器,而且可实现反射镜的微量的轴向位移,因此在校正发射光束的角差的同时,还可以对光束微小的位差进行修正。但此种FSM绕两轴的运动不相互独立,且每一个方向的偏转均需要控制3个驱动器来实现,因此,系统的控制方法相对复杂。FSM在各方向上的偏转角度与驱动器长度之间的关系如图15中的公式所列。

图15 双轴FSM驱动器的排布方式Fig.15 Actuator arrange styles of FSM with double axes
4.4 测量元件
在FSM系统中,测量元件用于对平面反射镜的位置进行实时测量,以实现FSM偏转角度的精确闭环控制。因此,测量元件的性能直接决定了FSM系统的整体性能,尤其是FSM的工作精度与分辨力。目前用于FSM系统的测量元件主要有:光栅测微仪、电涡流传感器、电容传感器、PSD、四象限探测器和电阻应变片等,如图16所示。系统中工作镜体位置的直接测量,且不会对FSM增加额外的测量阻扰[30];电容传感器和电涡流传感器的类似,均属于非接触式测量。它凭借测量精度高、响应速度快、探头体积小等突出优点,已被越来越多地应用于FSM系统中[9]。但高精度的电容传感器价格昂贵,且存在严重的温度漂移现象,成了限制其推广应用的主要因素;PSD与四象限探测器类似,都无法直接进行反射镜位置的测量。具体的测量方法是:指示激光经反射镜折转后,由探测器接收,间接实现FSM系统的位置测量与反馈。由于探测器的分辨力有限,因此,它的测量精度与指示激光的光程有关。且探测器距离反射镜越远,测量精度越高。所以这种测量方式的组成更为复杂,所占的空间更大,不利于外场实验和 FSM 系统的小型化[30,39]。
此外,压电陶瓷驱动的FSM也常常采用电阻应变片与外部电阻构成双臂电桥来实现压电陶瓷伸缩位移的测量,进而间接获得反射镜的位置信息。这种测量方式简单易行、成本低,顺应了FSM驱动传感一体化、小型化的发展趋势。但测量电路较为复杂,传感器的标定效果对系统的测量精度影响较大。并且,当温度发生变化时,测量结果可能出现较大的偏差。
4.4.2 测量元件的排布方式
图17所示为直接测量式位置传感器在双轴FSM系统中的排布方式。为了实现双轴FSM在两维方向上运动的闭环控制,至少需要2个传感器来实现各自位置信息的测量,如图17(a)所示,2个传感器分别布置在2个轴线上。为了进一步提高FSM系统的测量精度,采用每一维方向各布置2个传感器来实现工作镜体在该方向上角位移的测量,以消除工作镜体因轴向位移带来的误差,如图17(b)所示。此外,为了进一步压缩FSM的体积,常采用在4个驱动器对称线上均匀布置4个传感器的方式来实现FSM系统2个方向上位置信息的测量,如图17(c)所示。如此布置,不仅使FSM的结构更加紧凑,而且每个驱动器的运动位移均由两侧的2个位置传感器差分获得,工作镜体在每个方向上的运动角度
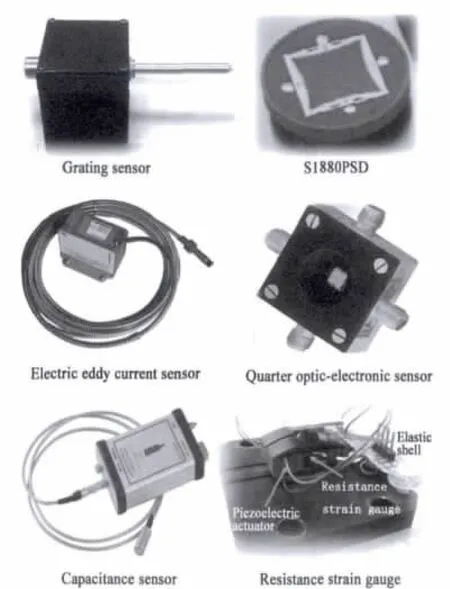
图16 FSM用位置测量传感器Fig.16 Position measure sensors used in FSMs
4.4.1 测量元件分析
光栅测微仪具有测量精度高、分辨力大、响应速度快以及环境适应性强等突出优点,广泛应用于工程测量中,但它的体积偏大,不利于FSM系统的小型化[21];电涡流传感器具有结构简单、灵敏度高、抗干扰能力强等优点,属于非接触测量方式,可用于FSM均由4个位置传感器差分获得,因此,大幅度提高了FSM系统的测量精度。

图17 双轴FSM传感器的排布方式Fig.17 Sensor arrange styles of FSM with double axes
4.5 控制系统
控制系统主要用来控制FSM实现定位或快速偏转等功能,可采用模拟控制器或数字控制器来实现。其中,模拟控制器具有带宽大、分辨率高、设计简单等优点,但存在元件老化、温度漂移等缺陷。而数字控制器不仅实现方便、灵敏度高、抗干扰能力强,而且精度不受噪声、漂移等的影响,尤其在实现复杂控制规律方面具有模拟控制器无可比拟的优势,因此被越来越多的应用于FSM系统的控制。
在数字控制算法方面,选择什么样的控制方案并没有一个绝对的依据,主要以提高系统的控制带宽和稳定性为最终目的。目前采用比较多的是PID控制算法,并通过理论计算、实验分析、参数自寻等手段,获得最佳的PID控制参数。同时,辅以剔野值算法、滤波算法等,以实现FSM系统较好的控制效果。此外,随着不同结构形式及功能用途FSM的出现,在传统PID控制算法的基础上发展了不完全微分PID算法、模糊PID算法等,也取得了良好的控制效果。
5 结论
随着FSM系统应用领域的进一步拓宽,对大口径、大角度、高承载、高响应速度FSM的需求也越来越多。为了适应这些应用需求,FSM呈现出多元化的发展趋势。
在驱动方式上,压电陶瓷和音圈电机凭借其高精度、高分辨率、高响应速度等优点,依然是FSM系统驱动元件的首选。在工作镜体的设计方面,选择比刚度高、散热性好的新型材料,并进行合理的轻量化结构设计,以适应FSM向大口径、高响应方向发展的趋势。在支撑铰链选择上,为了克服现有柔性无轴式结构承载能力不足的缺陷,针对柔性铰链的研究依然是热点。同时,为了从根本上改善柔性无轴式FSM的环境适应性,新型刚性承载式FSM也越来越受到重视。在测量元件方面,采用小体积、高精度、高响应、易于集成的微位移传感器成为主流。在控制系统方面,采用高运算速度的DSP处理器,结合先进的控制算法,以实现FSM系统更优的控制精度和动态响应性能。
[1] Larry Germann,Janet Braccil.Fine-steering mirror technology supports 10 nanoradian system[J].Optical Engineering,1990,29(11):1351 -1359.
[2] Wang Yonghui.Research on structure design of fast-steering mirror and It’s dynamic characteristics[D].Changchun:Changchun Institute of Optics Fine Mechanics and Physics,2004.(in Chinese)王永辉.快速控制反射镜结构及其动态特性的研究[D].长春:中科院长春光机所,2004.
[3] Wang Honghong,Chen Fangbin,Shou Shaojun.High precision electro-optical tracking system based on fast steering mirror[J].Journal of Applied Optics,2010,31(6):909 -919.(in Chinese)王红红,陈方斌,寿少峻.基于FSM的高精度光电复合轴跟踪系统研究[J].应用光学,2010,31(6):909 -919.
[4] Steven R.WASSON.Low-cost large-angle steering mirror development[C].SPIE,2009,74240L:1 -2.
[5] Wan Min,Zhang Jia-ru,Nie Wen-jie,et al.Precise pointing system using fast steering mirror[J].Laser& Infrared,1999,29(3):145 -147.(in Chinese)万敏,张家如,聂文杰,等.快速倾斜反射镜精跟踪系统[J].激光与红外,1999,29(3):145 -147.
[6] Xu Feifei,Ji Ming,Zhao Chuang-she.Status of fast steering mirror[J].Journal of Applied Optics,2010,31(5):847 -850.(in Chinese)徐飞飞纪明,赵创社.快速偏转反射镜研究现状及关键技术[J].应用光学,2010,31(5):847 -850.
[7] Zhang Bingna,Zhang Liang,Huang Genghua,et al.Research on pointing of piezoelectric fast steering mirror under vibration condition[C].SPIE,2011,819121:1 -7.
[8] Zhao Yuan.Shock response spectrum analysis of a tip/tilt mirror[J].Laser & Infrared,2012,42(2):180 - 183.(in Chinese)赵源.振镜冲击谱分析[J].激光与红外,2012,42(2):180-183.
[9] Daniel Joseph Kluk.An advanced fast steering mirror for optical communication[D].USA:Mechanical Engineering Northwestern University,2007.
[10] Gregory C Loney.Design of a high-bandwidth steering mirror for space-based optical communications[C].SPIE,1991,1543:225 -235.
[11] Francisc M T,Derek J E,Timothy R H,et al.High bandwidth fast steering mirror[C].SPIE,2005,587707:1 -14.
[12] Myung C,Andrew C,Christoph D,et al.Design and development of a fast steering secondary mirror for the giant magellan telescope[C].SPIE,2012,812505:1 -14.
[13] Yao Baidong,Hou Zaihong,Tan Fengfu,et al.Design and application of fast steering mirror based on GMM [C].SPIE,2012,819246:1 -7.
[14] Myung C,Andrew C,Christoph D,et al.Development of a fast steering secondary mirror prototype for the giant ma-gellan telescope[C].SPIE,2012,844420:1 -14.
[15] YOUNG-SOO KIM,JU HEON KOH,INWOO CHUNG,et al.Development status of the prototype of the GMT fast steering mirror[C].SPIE,2012,84150B:1 - 8
[16]MYUNG CHO,ANDREW CORREDOR,CHRISTOPH DRIBUSCH,et al.Performance prediction of the fast steering secondary mirror for the giant magellan telescope[C].SPIE,2012,844424:1 -13.
[17] XU Xinhang,Shi Kui,Liu Changshun,et al.A two-dimension fast-steering mirror.CN 101840052 B[P].(in Chinese)徐新行,时魁,刘长顺,等.一种二维快速控制反射镜.CN 101840052 B[P].
[18] Xu Xinhang,Wang Bing,Han Xudong,et al.Design of fast-steering mirror with sphere pair supporting structure driven by voice coil actuator[J].Optics and Precision Engineering,2011,19(6):1320 -1325.(in Chinese)徐新行,王兵,韩旭东,等.音圈电机驱动的球面副支撑式快速控制反射镜设计[J].光学 精密工程,2011,19(6):1320-1325.
[19] Xu Xinhang,Wang Bing,Han Xudong.Fast-steering mirror with self-aligning ball bearing supporting structure[C].SPIE,2012,8418:1 -7.
[20] Xu Xinhang,Wang Bing,Zhuang Xinyu.Research on mechanical structure of fast-steering mirror driven by voice coil actuators[J].Journal of Changchun University of Science and Technology,2011,30(1):25 - 30.(in Chinese)徐新行,王兵,庄昕宇,等.音圈电机驱动型快速控制反射镜机械结构研究[J].长春理工大学学报,2011,30(1):25-30.
[21] Han Xudong,Xu Xinhang,Wang Bing,et al.Grating sensor for linear distance used in fast-steering mirror[J].Opto-Electronic,2011,38(10):151 -155.(in Chinese)韩旭东,徐新行,王兵,等.快速反射镜系统用光栅测微仪[J].光电工程,2011,38(10):151 -155.
[22] Lu Yafei.Research on fast/fine steering mirror system[D].Changsha:Graduate School of National University of Defense Technology,2009.(in Chinese)鲁亚飞.快速反射镜机械结构特性设计问题研究[D].长沙:国防科技大学,2009.
[23] Wu Xin.Research on high-performance fast steering mirror system[D].Wuhan:Huazhong University of Science& Technology,2012.(in Chinese)吴鑫.高性能快速控制反射镜机械研究[D].武汉:华中科技大学,2012.
[24] Wu Xin,Chen Sihai,Xiong Xiaogang,et al.Research on the nonlinearity correction method for the piezoelectric optical scanner in a lidar system[C].SPIE,2012,78320T:1-13.
[25] Xiong Xiaogang,Chen Sihai,Wu Xin,et al.Linear control of laser scanner driven by voice coil motor[J].Infrared and Laser Engineering,2012,41(2):375 -378.(in Chinese)熊小刚,陈四海,吴鑫,等.音圈电机激光扫描器的线性扫描控制[J].红外与激光工程,2012,41(2):375-378.
[26] Ling Ning,Chen Donghong,Guan Chunlin,et al.Two-dimensional piezoelectric fast steering mirror[J].Opto-E-lectric Engineering,1995,22(1):51 -60.(in Chinese)凌宁,陈东红,官春林,等.两维高速压电倾斜反射镜[J].光电工程,1995,22(1):51 -60.
[27] Ling Ning,Chen Donghong,Yu Jilong,et al.Two-dimensional piezoelectric fast steering mirror with large aperture and angular displacement[J].Chinese Journal of Quantum Electronics1998,15(2):206 -211.(in Chinese)凌宁,陈东红,于继龙,等.大口径大角位移的两维高速压电倾斜反射镜[J].量子电子学报,1998,15(2):206-211.
[28] Li Xinyang,Ling Ning,Chen Donghong,et al.Stable control of the fast steering mirror in adaptive optics system[J].High power laser and particle beams,1999,11(1):31 -36.(in Chinese)李新阳,凌宁,陈东红,等.自适应光学系统中高速压电倾斜反射镜的稳定控制[J].强激光与粒子束,1999,11(1):31 -36.
[29] Yang Yijun,Ling Ning.The improvement of the mechanical resonant frequencies of fast steering mirrors[J].Opto-Electric Engineering,1999,26(2):57 - 62.(in Chinese)杨驿军,凌宁.高速倾斜反射镜机械谐振频率的改善[J].光电工程,1999,26(2):57 -62.
[30] Liu Shuhua,Lu Yawei,Luo Tong,et al.A study of digital control for fast steering mirror in space optical communication[J].Laser& Infrared,2002,32(3):165 - 167.(in Chinese)刘淑华,卢亚雄,罗彤,等.空间光通信中快速倾斜镜的数字控制研究[J].激光与红外,2002,32(3):165 -167.
[31] Zhu Heng,Chen Donghong,Ling Ning.A method for increasing the applied bandwidth of piezoelectric fast steering mirror[J].Opto-Electric Engineering,2009,36(7):60 -63.(in Chinese)朱衡,陈东红,凌宁.提高高速倾斜镜应用带宽的方法[J].光电工程,2009,36(7):60 -63.
[32] Chen Juan,Peng Haifeng.Control technology on FSM with flexure axis[J].OME Research Forum,2008,(2):43 -48.(in Chinese)陈娟,彭海峰.柔性轴FSM控制技术综述[J].光机电研究论坛,2008,(2):43 -48.(in Chinese)
[33] Zhou Jingbo,Sun Tao,Hou Guoan.Optimal design and test of double elastic plate based fast tool servo[J].Optics and Precision Engineering,2013,21(2):349 - 355.(in Chinese)周京博,孙涛,侯国安.双柔性支撑板快速伺服刀架优化设计及测试[J].光学 精密工程,2013,21(2):349-355.
[34] PAUL H.MERRITT,JOHN R.ALBERTINE.Beam control for high-energy laser devices[J].Optical Engineering,2013,52(2):0210051 -0210059.
[35] Zhang Limin,Guo Jin,Chen Juan.Summary of the mechanic structure for fast-steering mirrors[J].OME Information,2005(3):21 -24.(in Chinese)张丽敏,郭劲,陈娟.快速反射镜机械结构研究综述[J].光机电信息,2005(3):21 -24.
[36] Cao Nailiang,Xu Hong,Xin Hongwei,et al.Stress compensation of flexible supporting structures for mirrors using NiTi shape memory alloy [J].Optics and Precision Engineering,2012,20(10):2161 -2169.(in Chinese)曹乃亮,徐宏,辛宏伟,等.基于NiTi合金丝的反射镜柔性支撑结构的应力补偿[J].光学 精密工程,2012,20(10):2161-2169.
[37]MICHAEL JOSEPH OBIEN,ROCHESTER,WILLIAM BRALEY SMITH,et al.Fast steering mirror[P].United States Patent,Patent No.:US 8128246B1.
[38] JOHN D WITT,TYLER M AND ERSON.Fast steering mirror[P].United States Patent,Patent No.:UA 6856437 B2
[39] Deng Yaochu,Jia Jianyuan,Chen Guimin,et al.Precision tracking system with a fast steering mirror in vibration environment[J].Laser & Infrared,2008,38(1):11 -13.(in Chinese)邓耀初,贾建援,陈贵敏,等.振动环境下的快速反射镜精跟踪系统[J].激光与红外,2008,38(1):11 -13.
[40] Shao Jun,Ye Jingfeng,Hu Zhiyun.Technology of active damping based on fast-response mirror[J].Infrared and Laser Engineering,2012,41(3):734 -737.(in Chinese)邵珺,叶景峰,胡志云.快速响应反射镜主动减振技术[J].红外与激光工程,2012,41(3):734 -737.
[41] MICHAELSWEENEY,GERALDRYNKOWSKI,MEHRDAD KETABCHI,et al.Design Considerations for Fast Steering Mirrors(FSMs)[C].SPIE,2002,4773:63 -73.
[42] Guo Shaowen,Wang Wuyi,Zhang Guangyu,et al.Lightweight mirror technology for space optical systems[J].Optical Instruments.2005,27(4):78 -82.(in Chinese)国绍文,王武义,张广玉,等.空间光学系统反射镜轻量化技术综述[J].光学仪器,2005,27(4):78 -82.
[43] Zhang Yuanyuan,Jing Wei,Cheng Yuntao,et al.Design and finite element analysis of Φ510mmSiC ultra-lightweight mirror[J].Optics and Precision Engineering,2012,20(8):1718 -1724.(in Chinese)张媛媛,敬畏,程云涛,等.Φ510mm SiC超轻量化反射镜的设计与有限元分析[J].光学 精密工程,2012,20(8):1718-1724.
[44] Zeng Chunmei,Yu Jingchi,Guo Peiji.Design of ultralightweight and high precision 2m SiC segmented mirror[J].Infrared and Laser Engineering,2012,41(11):3034 -3039.(in Chinese)曾春梅,余景池,郭培基.2m超轻高精度SiC分块镜的设计 [J].红 外 与 激 光 工 程,2012,41(11):3034-3039.
[45] Fan Lei,Zhang Jingxu,Wu Xiaoxia,et al.Optimum design of edge-lateral support for large-aperture lightweight primary mirror[J].Optics and Precision Engineering,2011,19(6):1320 -1325.(in Chinese)范磊,张景旭,吴小霞,等.大口径轻量化主镜边缘侧向支撑的优化设计[J].光学精密工程,2012,20(10):2207-2213.
[46] Xu Xinhang,Wang Bing,Qiqo Jian,et al.Lightweight design of mirror in fast-steering mirror system[J].Chinese Optics,2012,5(1):35 -41.(in Chinese)徐新行,王兵,乔健,等.快反系统中平面反射镜的轻量化研究[J].中国光学,2012,5(1):35 -41.
[47] Paul R Yoder,Jr Opto-mechanical systems design[M].Beijing:China Machine Press,2006.
[48] Liu Xiangdong,Fu Qiang,Lai Zhilin.High-voltage power amplifier based on multi-unit cascade for piexoelectric actuators[J].Optics and Precision Engineering,2012,20(3):597 -606.(in Chinese)刘向东,傅强,赖志林.多单元浮地级联式压电陶瓷执行器高压驱动电源[J].光学 精密工程,2012,20(3):597-606.
[49] Zhang Dawei,Feng Xiaomei.The technical principle of voice-coil actuator[J].Journal of north university of China,2006,27(3):224 -228.(in Chinese)张大卫,冯晓梅.音圈电机的技术原理[J].中北大学学报,2006,27(3):224 -228.
[50] Wu Qiongyan,Wang Qiang,Peng Qi,et al.Wide bandwidth control of fast-steering mirr0r driven by voice coil motor[J].Opto-Electric Enginnering,2004,31(8):15 -18.(in Chinese)吴琼雁,王强,彭起,等.音圈电机驱动的快速控制反射镜高带宽控制[J].光电工程,2004,31(8):15 -18.
