基于驾驶模拟器的雾天驾驶行为特性研究*
2013-08-18陈秀锋曲大义刘尊民
陈秀锋 曲大义 刘尊民 郝 杰
(青岛理工大学汽车与交通学院 青岛 266520)
0 引 言
任何驾驶员在雾天行驶都存在驾驶风险,美国联邦公路管理局统计,每年因雾天引起的交通事故导致大约600人死亡,16 300人受伤.许多雾天事故都是多车事故,导致大量严重人员伤亡.在我国,随着社会经济的发展,雾害越来越严重,由浓雾引起的道路交通事故率也呈上升趋势.雾天是影响能见度最恶劣的气象条件之一,驾驶员视距大幅下降会导致驾驶员产生犹豫、疏忽甚至错觉[1-2].由于雾对光的散射及吸收作用,目标轮廓的清晰度下降,驾驶员对交通标志、路面设施和行人识别困难,容易造成追尾事故[3].因此,研究雾天对行车安全的影响,发现事故规律,提出减少和预防雾天事故的措施和对策,对保障驾驶员生命和财产安全具有重要的现实意义.
1 研究概况
R.J.Snowden[4]基于雾天环境视野范围内对比度统一下降的假设,提出驾驶员在低能见度雾天条件下往往以更高的速度驾驶.相反,D.A.Owens等[5]通过类似研究认为,雾天条件下驾驶员往往高估自己的车速,并以低于指示速度行驶.P.Pretto[6]提出雾天条件下对比度统一下降的假设是不合理的,雾天视野对比度随距离而变化,远离驾驶员的区域对比度非常低,靠近驾驶员区域的对比度较高.Pretto认为人们在雾天由于能见度的降低会高估驾驶车速.虽然Pretto确定了雾天驾驶员对车速的感知与控制,但一方面没有涉及速度限制和车速计用来指导驾驶情况下的驾驶行为研究,没有考虑道路标线对驾驶行为的影响;另一方面对现实行驶过程中驾驶速度和车道保持行为的关系也没有深入研究.
相对于雾天驾驶速度的影响因素,雾天驾驶行为和驾驶能力的影响因素要复杂得多.许多学者试用观测传感器对雾天车辆跟驰行为进行了研究.Hawkins[7]研究表明雾天能见度小于150m时,驾驶车速降低,能下降到100m时,车速降低25%~30%.同时平均车头间距小于60m的的车辆增加25%.研究雾天驾驶员驾驶行为变化的常用途径是驾驶模拟器仿真.van Derhulst等[8]利用驾驶模拟器仿真能见度为150m时的驾驶行为,实验表明驾驶员在低能见度时增加车头时距,但其原因是由于驾驶员希望知道是什么导致能见度下降而不是驾驶视野的变化.Broughton等[9]通过雾天跟驰模拟研究雾天驾驶员对能见度降低的反映情况,以及驾驶模式的改变对车速、安全和事故风险的影响程度,提出了“迟滞”与“非迟滞”两种驾驶模式.
国内对雾天交通安全的研究相对较晚,潘晓东等[10]分析高速公路成雾原因及对交通安全的影响,提出交通建设措施和应对策略.廖海峰等[11]根据跟车状态下停车过程及标志视认方法,进行了基于停车视距和交通标志认知距离的安全车速技术.李洪强、史桂芳等分别通过数学公式推导和场地试验方法进行了雾天限制车速计算.纵观国内研究,雾天行车安全研究侧重于车速感知,单纯从雾天环境车速限制和停车视距进行研究,不能反映雾天实际环境下影响车辆运行安全的多元性.为此,笔者针对雾天减加速提示、车速表和保持车道3种指令的组合约束模式,研究不同能见度下车辆速度选择及行车轨迹特性,研究结果能准确体现雾天驾驶员实际行车特性,为雾天安全行车管理与决策提供决策支持.
2 雾天驾驶实验设计
2.1 试验样本
选择120名(80名男性,40名女性)驾驶员进行试验测试,年龄在25~55岁之间,平均驾龄2.9 a.所有驾驶员经医院进行常规的健康检查均符合身体健康要求,都没有视觉问题.每个小组包括20名参加者.对测试者存在3种指令:(1)是否使用速度提示;(2)驾驶任务的优先次序;(3)是否使用车速表.驾驶模拟具体分组及指令组合见表1.
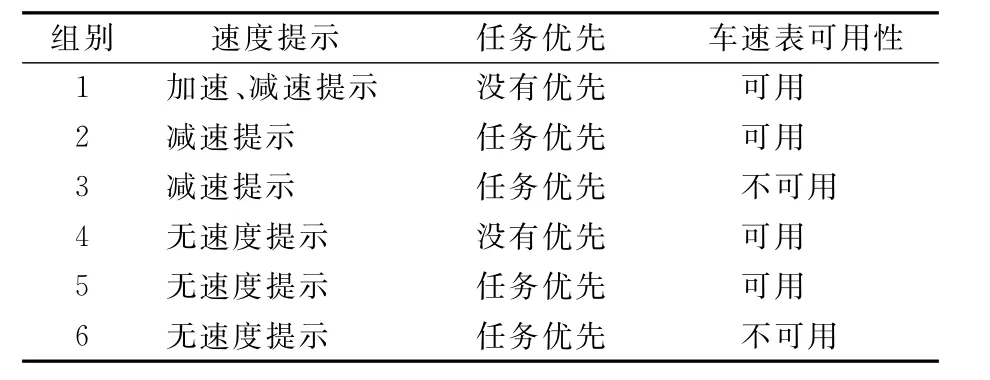
表1 驾驶员分组情况表
车速提示器用来给驾驶员提供车速反馈,当他们的速度大于或低于试验要求速度时,用来提醒驾驶员“降低你的车速”或“提高你的速度”.如果某组采用了速度提示器,那么在所有雾天环境下行驶都会给出适当的警示.没有收到任何速度提示的被称为没有速度提示.任务优先是指要求驾驶员必须调整车速以便安全保持原有车道行驶.试验可以为雾天车辆主动安全预警和路侧可变信息版应用提供理论支持.
2.2 试验方法
研究试验平台有驾驶器、计算机控制、虚拟仿真场景和车辆运行信息采集等系统构成.驾驶员驾驶一辆固定驾驶模拟器与一双通道立体显示屏连接.主控制机通过VCR技术建立虚拟路况场景并将驾驶员输入信息融合进行模拟.试验者通过转向盘、踏板操作与模拟器互动.在整个试验中该模拟器采用100Hz的频率收集车速和位置数据,采集有效数据不包括前30s试验数据.
模拟道路环境为直弯道组合线形二级公路,双向2车道,单车道宽度3.75m,设计速度60km/h.车道用单一的白色边缘线和单黄中心线作为标记.
2.3 雾天场景
雾是悬浮在近地面大气中的大量细微水滴的可视集合体.雾的出现导致地面的水平能见度显著降低.正常行驶时,能见度为500m,而浓雾天气能见度低于30m.随着雾的浓度的变化,驾驶员在直路上的能见距离不断降低,本次试验取雾天能见度为500,200,80,50和30m.
3 验结果分析
为了保证试验数据的有效性,试验的前30s所得数据不计.按照2.1中的分组和要求进行驾驶模拟,测试者可以不断的重复试验环节,直到他们感到能舒适地驾驶模拟器为止.每个环节结束后测试者都进行短暂的休息.
3.1 车辆运行速度
试验小组平均车速随能见度变化趋势,见图1,表2为不同能见度不同分组车辆平均速度.

图1 试验小组平均车速随能见度变化趋势图
由表2可知,从500~50m能见度下,6组试验驾驶员的平均行车速度在56.8~62.3km/h变动,随着能见度的降低车速降低不明显,车辆速度与雾天期望车速不匹配,80m能见度下平均车速最高;30m能见度下,平均车速降低明显,为56.8km/h.利用SPSS软件对每组进行单因素方差分析,雾天能见度降低对第1组(p<0.5)除外的其他5组驾驶速度影响显著.随着能见度的降低,速度呈现先增加后降低的趋势.对不同能见度进行单因素分析得出,500m能见度F(5,71)=2.9,p<0.5;200m 能见度F(5,71)=3.1,p<0.5;80m能见度F(5,71)=4.2,p<0.001;50m能见度下F(5,71)=3.8,p<0.001;30m能见度下F(5,71)=6.5,p<0.001;500,200,80和50 m能见度下,第4组车辆运行速度最高.而30m能见度下第1组车辆平均运行速度最高.

表2 不同能见度不同分组车辆平均速度(标准差)
3.2 车辆车道保持
3.2.1 车道保持能力 驾驶员在行车过程中,根据交通状况和路面特征状况调整车速从而准确沿着规定道路行驶,保持正确的车道位置的能力,被称为车道保持能力.如图2所示是车辆行驶中车身保持在道路标线a,b之间的能力
图2 车辆行驶示意图
3.2.2 车道保持率 车道保持率是指驾驶过程中车辆车身越过2条道路标线行驶时间与全部时间之比,公式表示为

式中:t1为车身越过道路标线a行驶的时间,s;t2为车身越过道路标线b行驶的时间,s;T为车辆行驶总时间,s.
3.2.3 实验数据分析 不同雾天能见度下,车道保持率分析图,见图3,表3.

图3 不同雾天能见度下车道保持率分析图

表3 不同能见度不同分组平均车道保持率(标准差)
由表3可知,在前3个最高能见度环境下,测试者都能够很好地保持原车道行驶,汽车操纵性好,80m雾天能见度下车道保持率高于其他2个试验小组,6组试验者的平均百分率为96.32%;30m能见度下车道保持率明显降低.能见度降低到80m时,由于驾驶视距的降低导致驾驶员紧张程度增加,道路标线成为驾驶的主要诱导方式,此时车道保持率有所增加;但随着能见度的继续降低,道路标线逐渐模糊而失去驾驶诱导作用,驾驶员车道保持率逐渐降低.综上所述,在500m到30m的能见度变化中,车道保持率先增加后降低.
利用SPSS统计分析主效应得出雾天能见度对车辆车道保持的影响远大于不同分组情况的影响.单因素方差分析得出,雾天对每一组的车道保持率都有显著影响.Post Hoc多重比较表明第1,2和6组能见度30m的车道保持率明显小于其他能见距离.第3组试验者车道保持率最高,平均为96.04%.雾天有效控制行车轨迹的方法是降低行车速度,但驾驶员在雾天超速行驶导致车道保持率明显降低,主要原因有2个:(1)雾天驾驶员注意力集中,无意识的增加行驶速度;(2)低能见度下,道路标线识别能力下降.
4 结束语
本文在速度感知、速度反馈、驾驶行为反馈和驾驶优先等约束下对驾驶行为进行研究,研究结果能更好的反应雾天驾驶实际.试验表明,在能见度逐渐降低的环境下,驾驶员具有较好的车道保持能力,并且趋向于高速行驶.但雾天驾驶员视距太小,车辆不能有效避让道路危险,导致交通事故增多.今后,开展实际雾天驾驶行为调查分析,研究不同驾驶员雾天行车的心理和生理特点决定的行车特性,将更有益于雾天安全管理.
[1]史桂芳,袁 浩,程建川.雾天交通限速计算[J].西南交通大学学报,2010,45(1):136-139.
[2]潘娅英,陈 武.引发公路交通事故的气象条件分析[J].气象科技,2006,34(6):778-782.
[3]李洪强,程国柱,夏正浩.高速公路不良天气条件下最高车速限制合理取值[J].石家庄铁道学院学报:自然科学版,2009,22(3):78-81.
[4]SNOWDEN R J,STIMPSON N,RUDDLE R A.Speed perception fogs up as visibility drops[J].Nature,1998:392-450.
[5]OWENS D A,WOOD J,CARBERRY T.Perceived speed and driving behavior in foggy conditions[J].Journal of Vision,2002,7(2):631-637.
[6]PRETTO P.The perception and production of speed during self-motion:evidence for non-optimal compensation mechanisms[D].Universita Degli Studi Di Padova,2008.
[7]HAWKINS R K.Motorway traffic behavior in reduced visibility conditions[C]∥Freeman M H,Smith P,Gale A G,Taylor,et al.Vision in Vehicles II.Elsevier Science Publishers B.V.,North-Holland,1988(2):9-21.
[8] VAN DERHULST M,ROTHENGATTER T,MEIJMAN T.Strategic adaptations to lack of preview in driving[J].Transportation Research Part F,1998(1):59-75.
[9]BROUGHTON K L,SWITZER F,SCOTT D.Car following decisions under three visibility conditions and two speeds tested with a driving simulator[J].Accident Analysis and Prevention,2007,39 (1):106-116.
[10]潘晓东,蒋 宏,高 昂.雾天高速公路交通事故成因分析及安全对策[J].交通标准化,2006(10):200-203.
[11]廖海峰,崔显忠,杜志刚.雾天高速公路安全车速分析[J].交通科技与经济,2009(2):1-3.
